Actualizar Cinemática del Robot
Seguir los pasos de esta sección es opcional y solo es necesario en ciertas circunstancias cuando se requiere precisión en la programación fuera de línea. Esta sección explica cómo introducir los valores cinemáticos únicos de su robot UR en RoboDK para simular el robot con precisión.
La cinemática del controlador UR es única para cada robot. La cinemática son las dimensiones que definen el robot en forma de tabla DH (Denavit Hartenberg). El simulador de RoboDK utiliza la cinemática UR nominal por defecto, por lo que puede observar una discrepancia de 2 mm a 10 mm entre la cinemática del simulador y la del controlador.
Para que la simulación coincida exactamente con el robot real, puede importar la cinemática específica de su robot UR simplemente abriendo un archivo URP creado con el teach pendant.
También puede cargar el archivo URP manualmente siguiendo este procedimiento:
5.Obtenga un archivo URP generado utilizando el robot real (no utilizando RoboDK ni el simulador UR)
6.Abra su robot en RoboDK. Encontrará su robot UR en la biblioteca de RoboDK. También puede utilizar un robot UR disponible en una de sus estaciones de RoboDK existentes.
7.Seleccione Herramientas-Ejecutar Script
8.Seleccione UR_LoadControllerKinematics
9.Seleccione el archivo URP extraído del controlador del robot.
Debería ver un mensaje como el que se muestra en la siguiente imagen. Puede ver un mensaje de advertencia si no cargó un archivo URP válido o no seleccionó el robot UR correcto.
Cuando se complete este procedimiento, puede hacer clic con el botón derecho en un robot y seleccionar Guardar como .robot. Estos parámetros se guardan con el archivo del robot y puede utilizar el archivo del robot en lugar de repetir este procedimiento para cada proyecto nuevo.
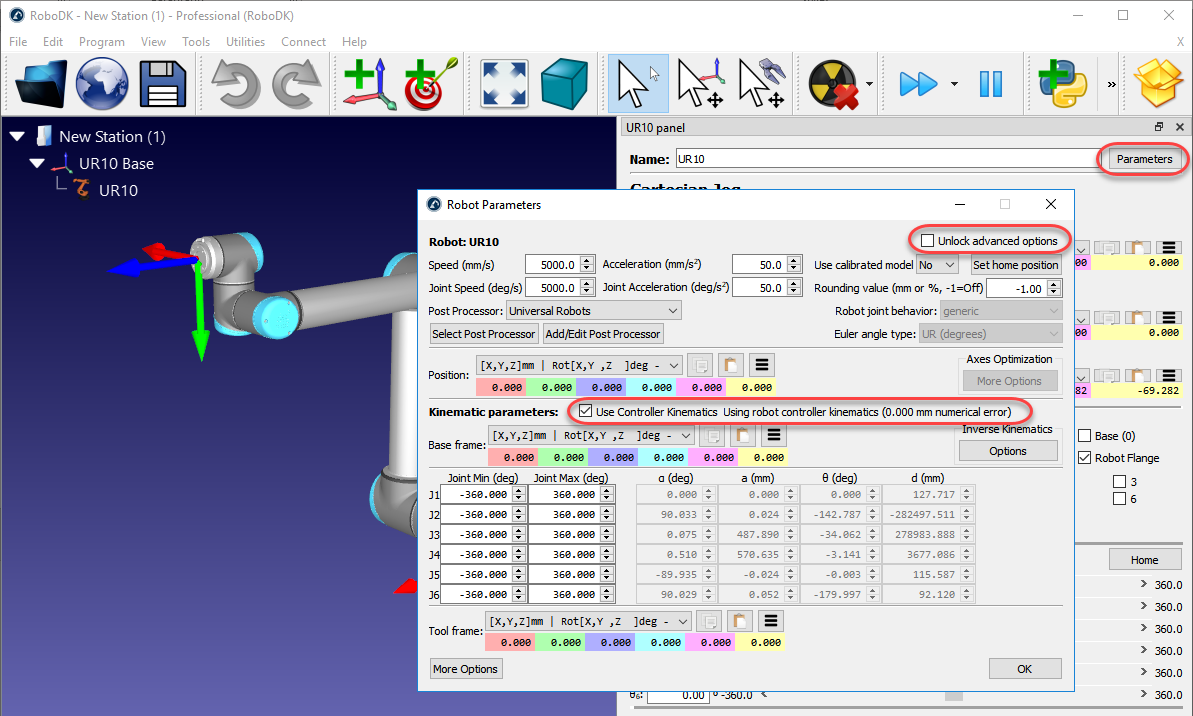
RoboDK extrae la información específica de su robot desde el archivo URP y la tiene en cuenta para la simulación y la programación fuera de línea en el archivo del robot. Puede cambiar esta configuración y volver a la cinemática predeterminada en el menú de parámetros del robot como se muestra en la siguiente imagen.
Notará que la información de Pose mostrada en el teach pendant coincide con la cinemática mostrada en RoboDK (asegúrese de eliminar el sistema de referencia de herramienta y el sistema de referencia en RoboDK y en el robot UR para realizar la comparación).
La cinemática UR cambia de un robot a otro porque cada robot es calibrado en fábrica por UR. Otros fabricantes de robots como KUKA, ABB, Motoman o Fanuc no calibran sus robots a menos que se adquiera la denominada opción de Precisión Absoluta. Las opciones de Precisión Absoluta pueden tener en cuenta hasta 40 parámetros de calibración o más.
Este procedimiento no es lo mismo que la calibración de robot de RoboDK. La calibración de robot ayuda a mejorar la precisión del robot real.