Ejecutar el programa desde la PC
Los controladores de robots proporcionan una alternativa a la Programación Fuera de Línea (donde se genera un programa, luego se transfiere al robot y se ejecuta). Con los controladores de robots, es posible ejecutar una simulación directamente en el robot (Programación en Línea). Más información disponible en la sección Controladores de Robot.
Los programas del robot pueden ser ejecutados directamente desde RoboDK hasta el robot real si se ha establecido una conexión de red.
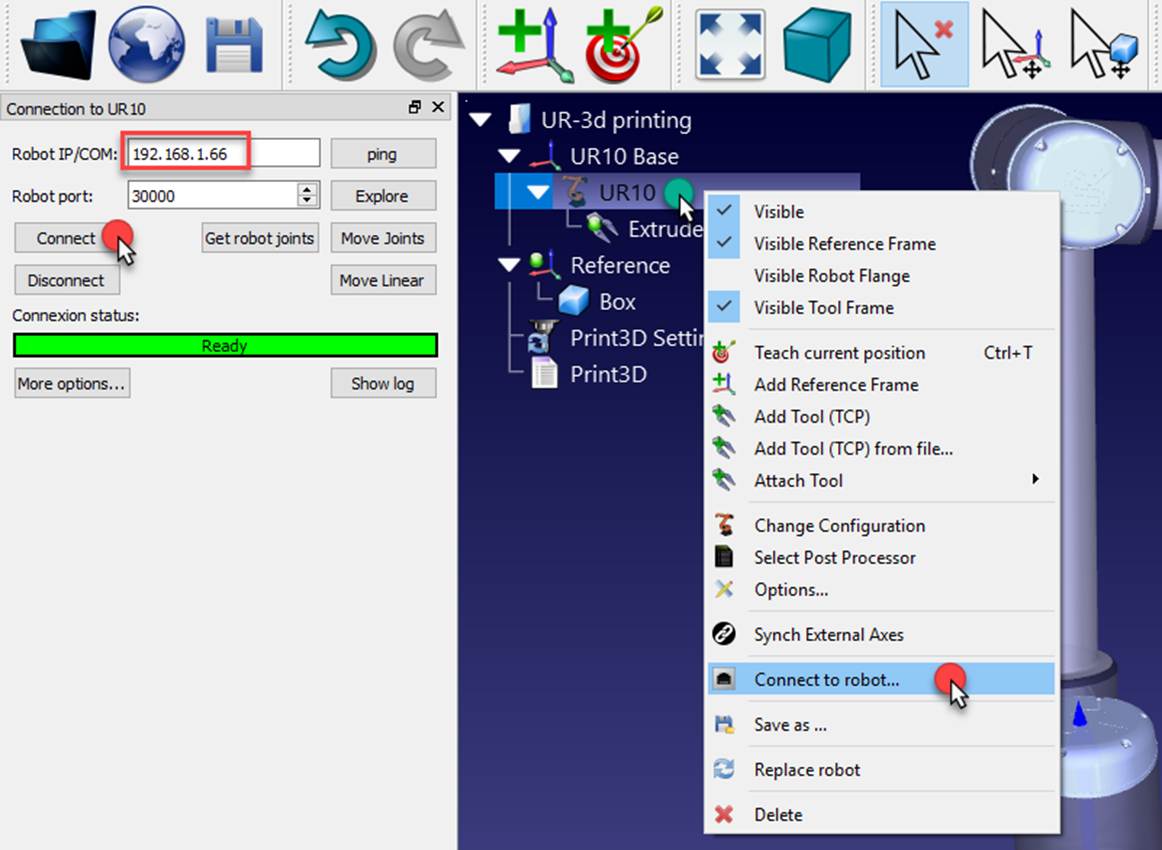
1.Haga clic derecho en el robot en RoboDK
2.Seleccione 
3.Ingresar la IP del robot
4.Seleccione Conectar.
Debería aparecer un mensaje verde mostrando Listo si la conexión tuvo éxito.
El robot puede ser movido al seleccionar Consiga articulaciones del robot, Mover articulaciones y Movimiento lineal, desde el menú de conexión.
Hay dos métodos diferentes para ejecutar el programa desde la PC para el robot:
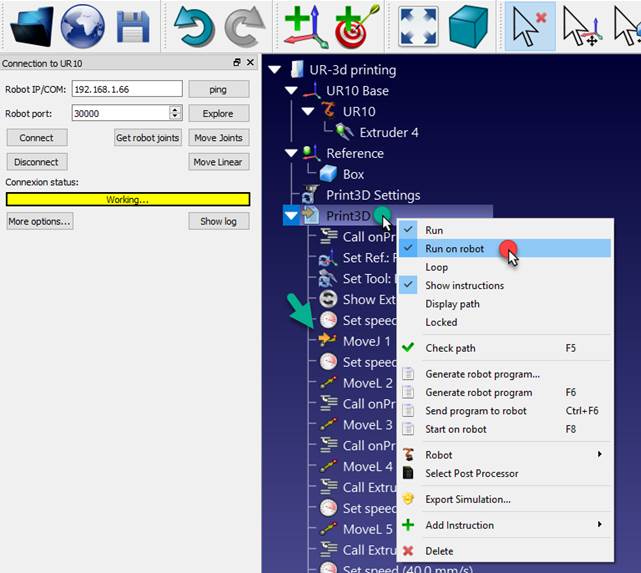
1.Ejecutar en el robot paso a paso con retroalimentación en RoboDK (programación en línea):
Este método utiliza el robot como un servidor y cada instrucción se envía al robot paso a paso, ya que se ejecuta en el simulador. Este método es útil para propósitos de depuración.
a.Haga clic derecho en el programa (Print3D en este ejemplo)
b.Seleccione Ejecutar en el robot
c.Haga doble clic en el programa para iniciarlo (o haga clic con el botón derecho y seleccione ejecutar)
Una vez esta opción sea marcada, se conectará al robot real cada vez que se haga doble clic en un programa (o haga clic derecho, a continuación, seleccione Ejecutar)
Estas operaciones también están disponibles desde el API RoboDK y permite integrar la programación de robots con otras aplicaciones. La API está disponible en Python y C# y otros lenguajes de programación.
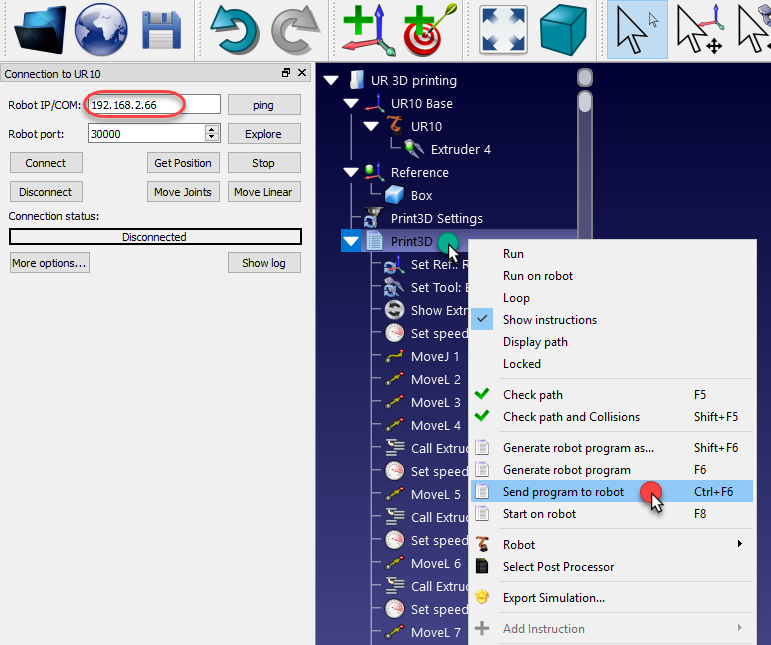
2.Enviar programa al robot genera el programa completo, lo transfiere al robot y comienza el programa en el robot real (programación fuera de línea de robots):
a.Haga clic derecho en el programa (Print3D en este ejemplo)
b.Seleccione Enviar Programa al robot (Ctrl +F6).
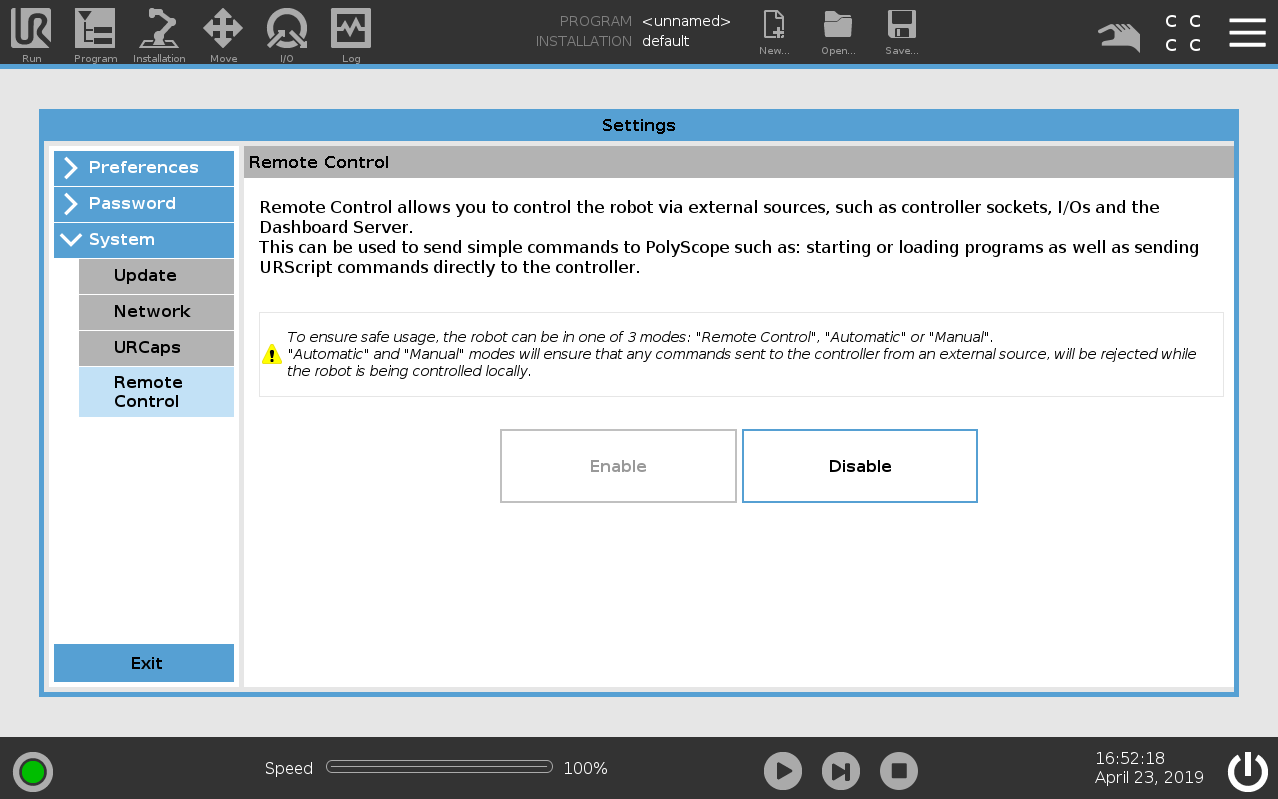
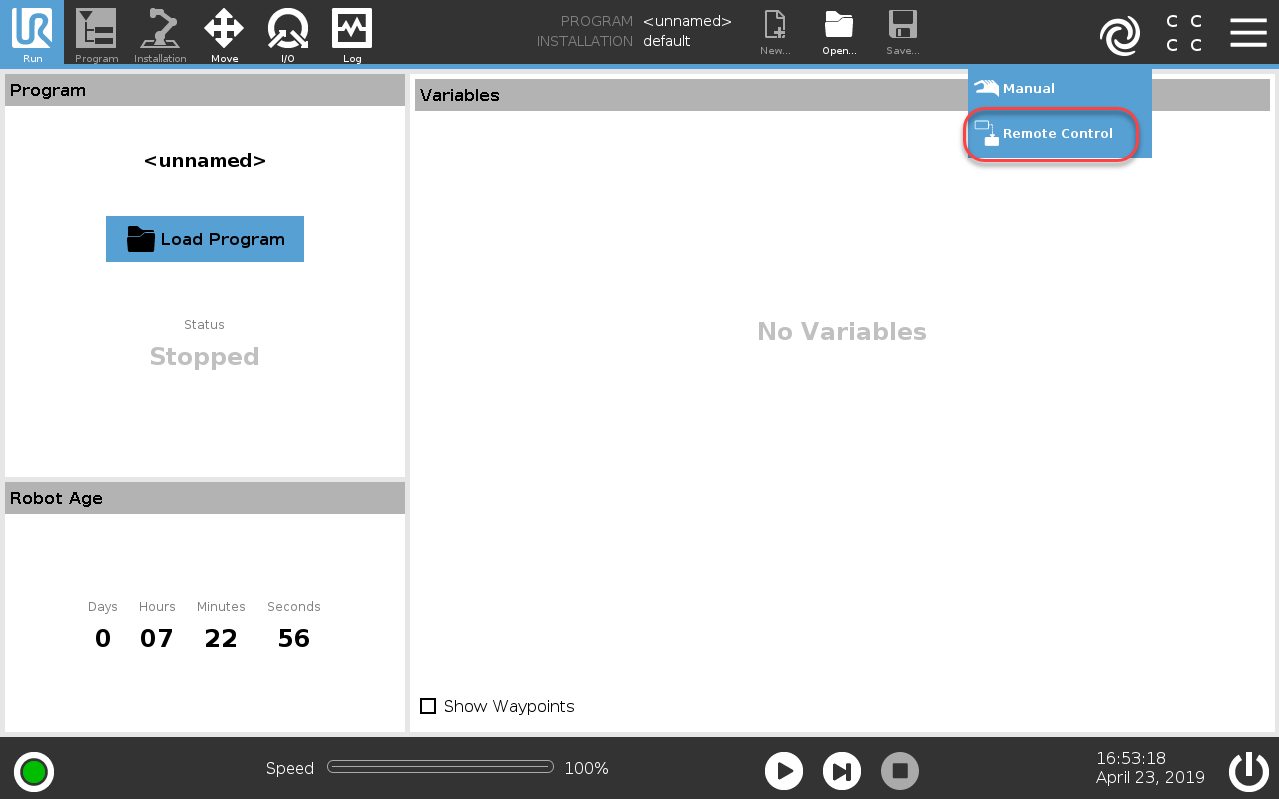
Cómo habilitar el Control Remoto en URe
Debe habilitar la opción de Control Remoto en el controlador del robot UR si tiene un robot URe (UR3e, UR5e o UR10e).
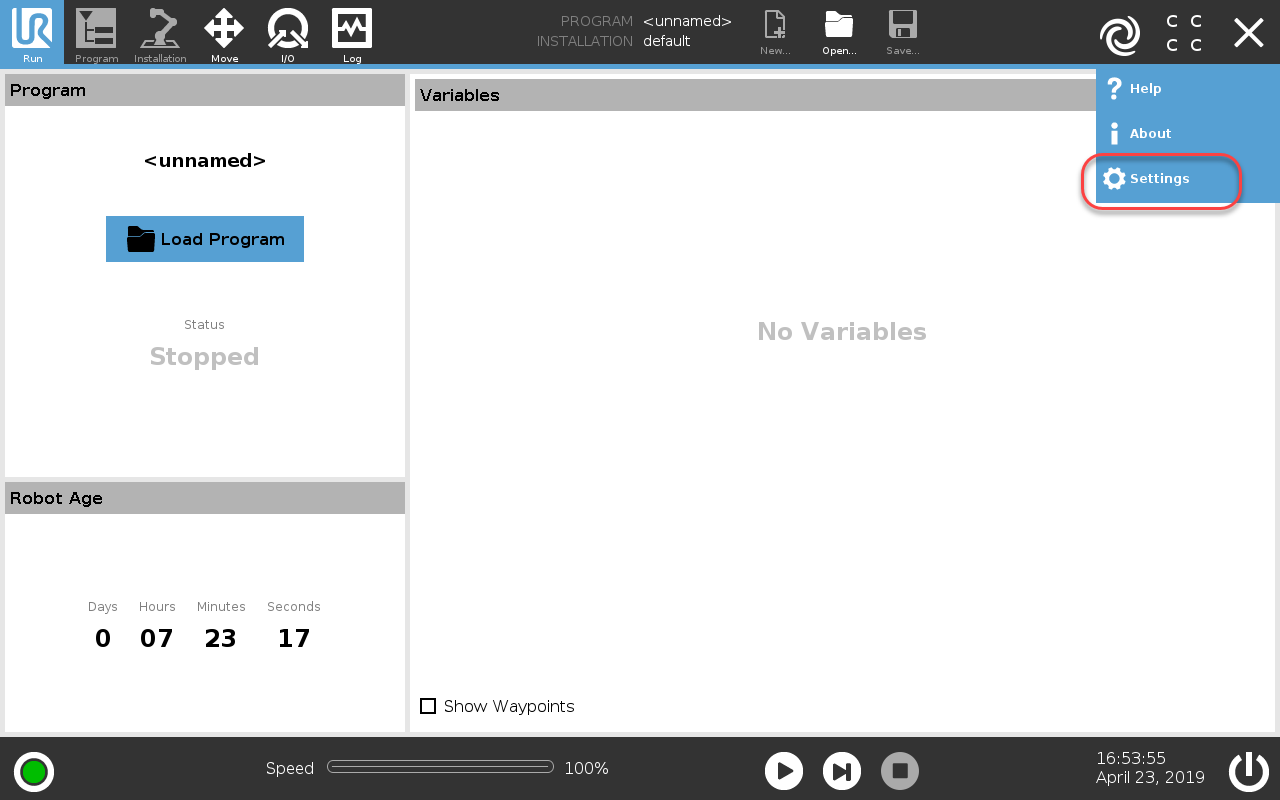
Siga estos pasos para habilitar el Control Remoto de URe:
3.Seleccione el menú Configuración desde el botón superior derecho
4.Seleccione Sistema-Control remoto
5.Seleccione Habilitar
6.Cambie el modo de operación a Control remoto
Detalles de la conexión de red
Las conexiones del controlador de RoboDK a los sistemas de control UR son bidireccionales. Esto significa que el controlador no solo se conecta al sistema remoto como cliente, sino que también actúa como servidor al mismo tiempo, esperando una conexión inversa desde el sistema de control. Esa conexión inversa del sistema de control UR al ordenador de RoboDK es considerada por este último como una conexión entrante externa. Este tipo de conexiones suelen ser bloqueadas por el firewall del sistema operativo. Si deshabilitar completamente el firewall de su sistema no es aceptable, utilice la siguiente tabla para permitir las conexiones entrantes y salientes necesarias:
Propósito | Dirección | Protocolo | Número de puerto | Número de puerto
|
Interfaz secundaria | RoboDK → UR | TCP | 30002 | 30002 |
Interfaz en tiempo real (RTDE) | RoboDK → UR | TCP | no se usa | 30004 |
Interfaz inversa | UR → RoboDK | TCP | 30000 | 50001 |
Emisor de scripts | UR → RoboDK | TCP | no se usa | 50002 |
Interfaz de trayectoria | UR → RoboDK | TCP | no se usa | 50003 |
Interfaz de comandos de script | UR → RoboDK | TCP | no se usa | 50004 |