Recuperar la IP del robot UR
La IP del robot es requerida para ejecutar programas directamente desde el simulador RoboDK. También es posible transferir archivos de programa a través de FTP.
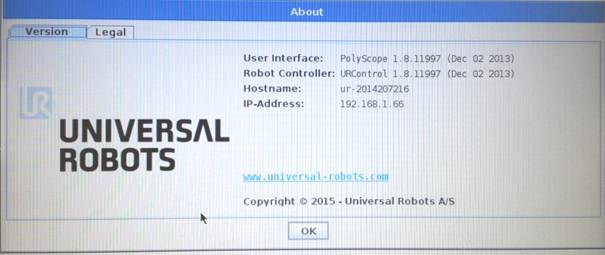
La IP del robot puede ser recuperada desde el menú Acerca de en la pantalla principal del teach pendant de UR.
El robot debe ser conectado a la computadora a través de una conexión Ethernet (conexión directa o a través de una red). Una prueba de Ping permite probar si el enlace de red se ha establecido correctamente.