Calibración del sistema de coordenadas
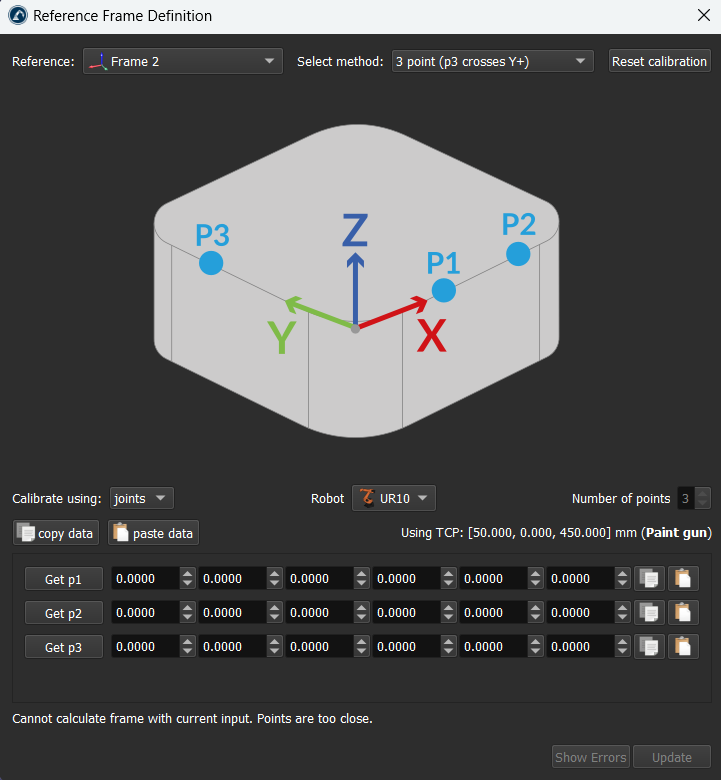
Seleccione Utilidades➔ Calibrar referencia para calibrar un sistema de coordenadas. Es posible establecer un sistema de coordenadas utilizando diferentes métodos. En el ejemplo de la figura, un sistema de coordenadas está definido por tres puntos: los puntos 1 y 2 definen la dirección del eje X y el punto 3 define el eje Y positivo.
Importante: Se recomienda utilizar objetivos de articulación y activar la precisión del robot antes de calibrar el sistema de coordenadas, ya que la precisión del brazo del robot ayudará a definir mejor el sistema de coordenadas.
Nota: Más información disponible sobre la calibración del sistema de coordenadas en la sección de consejos.