Calibrar los parámetros del robot
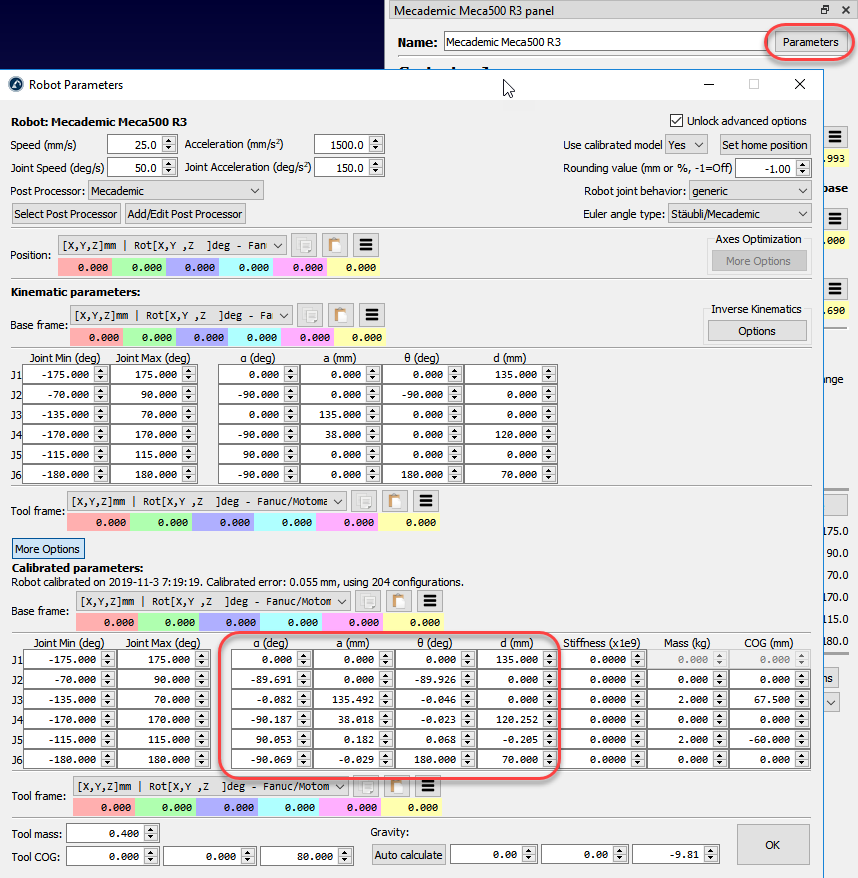
Puede acceder a los parámetros calibrados en el menú Parámetros una vez que se ha calibrado un robot. Algunos controladores de robot permiten modificar ciertos parámetros del robot.
Nota: RoboDK utiliza la convención Denatit-Hartenberg Modified. Asegúrese de utilizar todos los parámetros seleccionados/calibrados.
Importante: Debemos asegurarnos de no generar programas filtrados si actualizamos los parámetros del controlador del robot.