Configuración
Para utilizar el sistema TwinTrack es necesario cargar el robot en RoboDK y conectarlo al robot y al sistema de medición. Opcionalmente podemos modelar la célula añadiendo los modelos 3D de objetos y herramientas. Esto ayudará a evitar colisiones.
8.Cargue el robot:
a.Seleccione Archivo➔ Abrir biblioteca en línea. La biblioteca en línea aparecerá en RoboDK.
b.Utilice los filtros para encontrar su robot.
c.Seleccione Descargar para cargar automáticamente el robot en su estación RoboDK.
d.Como alternativa, descargue el archivo del robot directamente de la biblioteca en línea (https://robodk.com/library) y ábralo con RoboDK (archivo .robot).
9.Conecte el sistema de medición:
a.Conecte el sistema de medición a su ordenador.
b.Seleccione Conectar y conéctese a su sistema de medición. Asegúrese de que también está instalado el software necesario. Es posible que tenga que la IP del rastreador en función del sistema de medición que utilice.
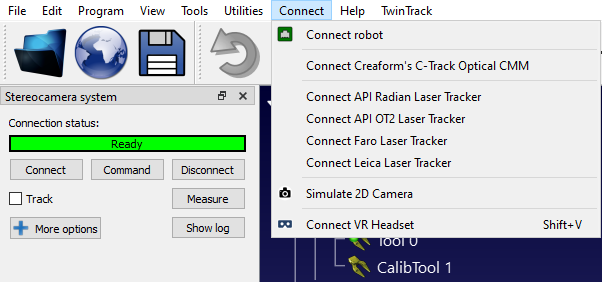
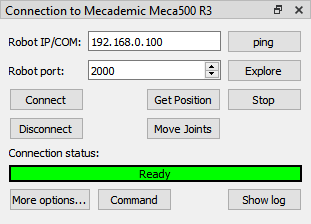
10.Conecte el robot:
a.Seleccione Conectar➔ Conectar robot.
b.Introduzca la IP y el puerto del robot.
c.Seleccione Conectar.