Enseñar curvas en movimiento
Puede crear curvas, objetivos y sistemas de coordenadas en un objeto en movimiento si su sistema de medición admite el seguimiento de varios objetos al mismo tiempo. Esto puede hacerse siguiendo el mismo procedimiento que si fueran estáticos.
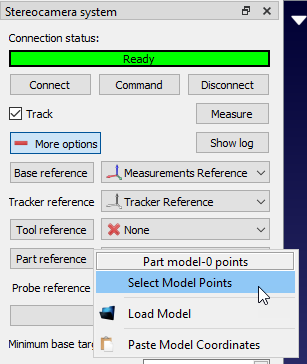
La principal diferencia es que el objeto en movimiento debe ser rastreado en tiempo real (utilizando un rastreador u objetivos reflectantes). Por ejemplo, si utiliza el sistema de medición C-Track de Creaform, deberá especificar el modelo en la sección de referencia de la pieza y vincularlo al sistema de coordenadas que representa.
Es necesario definir la dependencia correcta de los sistemas de coordenadas y los objetos en RoboDK para que pueda definir nuevos sistemas de coordenadas relativos a su objetivo móvil.
Este método de programación de piezas puede no ser tan preciso como cuando las piezas son estáticas.