Enseñar curvas
Con RoboDK TwinTrack puede crear trayectorias o curvas de robot manualmente con su sonda.
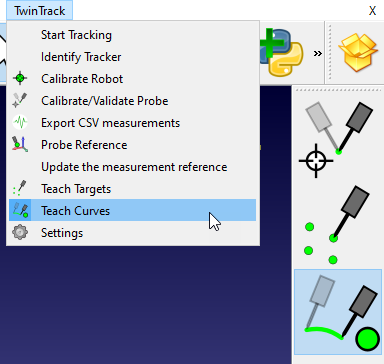
Puede iniciar el modo de enseñar objetivos seleccionando TwinTrack➔ Enseñar curvas. Este botón también está disponible por defecto en la barra de herramientas de TwinTrack.
RoboDK calcula y muestra la posición del robot en tiempo real basándose en la posición de su mano. Podrá ver fácilmente qué zonas son alcanzables por su robot.
Puede crear una curva manteniendo pulsado el primer botón de su sonda. Una vez que desee crear un programa, puede pulsar el segundo botón de su sonda y RoboDK creará y simulará el programa:
●Mantenga pulsado el primer botón: enseñar curvas/trayectorias.
●Segundo botón: crear y simular el programa en RoboDK.
●Mantenga pulsado el segundo botón: ejecute el programa en el robot.