Enseñar un sistema de coordenadas
Con RoboDK TwinTrack puede sondear y localizar sus sistemas de coordenadas (o sistemas de coordenadas) para localizar objetos en el espacio de trabajo del robot.
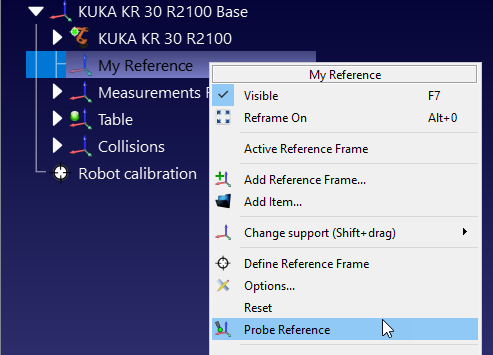
Haga clic con el botón derecho del ratón en su sistema de coordenadas y seleccione Sonda de referencia.
A continuación debe sondear 3 puntos en el siguiente orden:
1.Primer punto en el origen.
2.Segundo punto a lo largo del eje X positivo.
3.Tercer punto a lo largo del eje Y positivo.
Si define correctamente su sistema de coordenadas, podrá programar los robots a distancia. Por ejemplo, si tiene un sistema de coordenadas correctamente definido, cuando quiera programar una nueva pieza podrá hacerlo simplemente desde su oficina o desde casa sin ni siquiera tener que estar cerca de su robot.