Marco de referencia y marco de herramientas
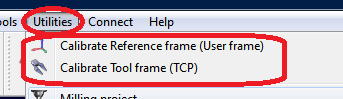
RoboDK proporciona algunas utilidades para calibrar los sistemas de coordenadas y los marcos de herramientas. Puede acceder a estas herramientas desde Utilidades➔ Calibrar sistema de coordenadas y Utilidades➔ Calibrar marco de herramientas respectivamente.
Para calibrar un sistema de coordenadas o una herramienta que no haya sido calibrada automáticamente (también conocidos como marco de usuario y TCP respectivamente) necesitamos algunas configuraciones de robot que toquen 3 o más puntos, estas configuraciones de robot pueden ser valores de articulación o coordenadas cartesianas (con datos de orientación en algunos casos). Se recomienda utilizar los valores de articulación en lugar de las coordenadas cartesianas ya que es más fácil comprobar la configuración real del robot en RoboDK (copiando-pegando las articulaciones del robot en la pantalla principal de RoboDK).
Calibrado de herramientas
Seleccione Utilidades➔ Calibrar herramienta para calibrar el TCP utilizando RoboDK. Podemos utilizar tantos puntos como deseemos, utilizando diferentes orientaciones. Un mayor número de puntos y mayores cambios de orientación es mejor, ya que obtendremos una mejor estimación del TCP, así como una buena estimación del error del TCP.
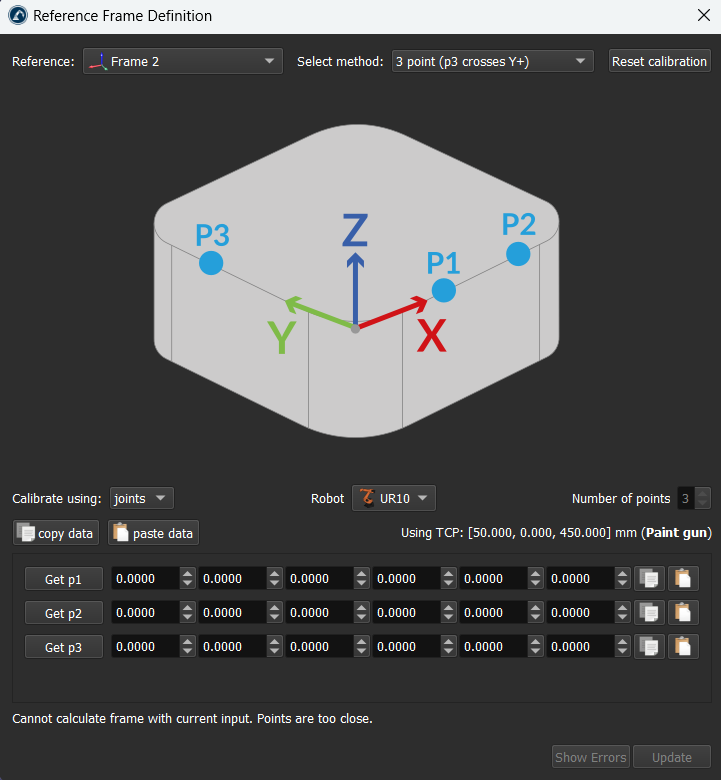
Calibración del sistema de coordenadas
Seleccione Utilidades➔ Calibrar referencia para calibrar un sistema de coordenadas. Es posible establecer un sistema de coordenadas utilizando diferentes métodos. En el ejemplo de la figura, un sistema de coordenadas está definido por tres puntos: los puntos 1 y 2 definen la dirección del eje X y el punto 3 define el eje Y positivo.