Programación fuera de línea
Puede utilizar las funciones de enseñanza mediante demostración sin un robot real. Esto significa que puede simular y programar su robot fuera de línea sólo con su sistema de medición antes de tener acceso al robot real.
Simplemente necesita una pieza con un sistema de coordenadas bien definido que pueda utilizar como referencia.
Una vez que tenga listos el sistema de medición y su pieza, puede seguir estos pasos para definir el sistema de coordenadas de su dispositivo de medición:
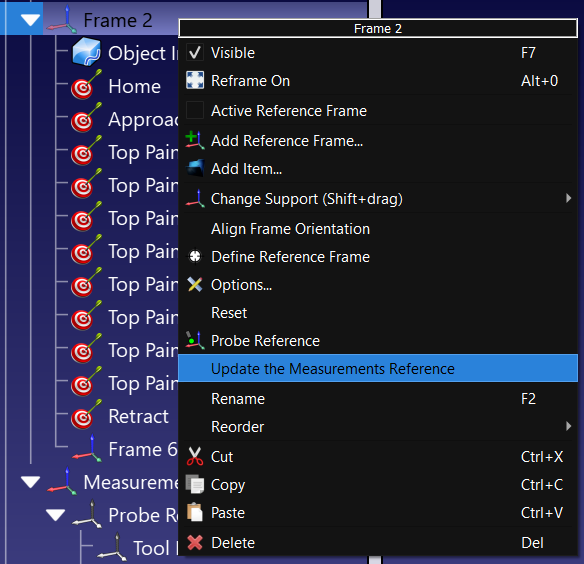
1.Haga clic con el botón derecho del ratón en el sistema de coordenadas de su pieza (o en el sistema de coordenadas de la plantilla a la que está unida).
2.Seleccione Actualizar la referencia de mediciones.
3.Siga las instrucciones de la pantalla para enseñar 3 puntos que definen el sistema de coordenadas: el origen, un punto en X+ y un punto en Y+.
El sistema de medición se actualizará en consecuencia y podrá proceder a enseñar puntos, curvas u otros sistemas de coordenadas.