Programación precisa fuera de línea
Cuando un robot ha sido calibrado con RoboDK tenemos la opción de activar la cinemática precisa haciendo clic con el botón derecho del ratón sobre el robot y seleccionando Usar cinemática precisa.
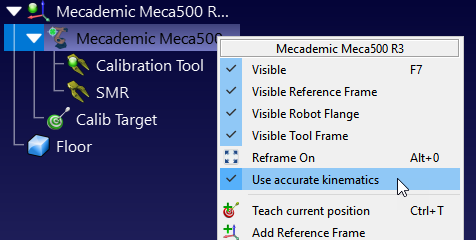
Si la precisión está activa, veremos un punto verde, si no lo está, veremos un punto rojo.
Esta es la opción recomendada para obtener unos resultados de precisión óptimos. Con la opción de precisión del robot activada en RoboDK, todos los programas generados por RoboDK se filtrarán automáticamente. Esto significa que todas las coordenadas cartesianas se modificarán ligeramente para compensar los errores del robot.
Esta es la opción más adecuada si tiene previsto utilizar sus robots para el mecanizado robotizado, programar robots a partir de archivos NC o utilizar cualquiera de los plugins CAD/CAM compatibles con RoboDK.