RoboDK TwinTrack
RoboDK TwinTrack le permite imitar y reproducir fácilmente los movimientos humanos con un robot para lograr una automatización rápida y fiable. Puede enseñar manualmente a su robot la trayectoria que debe seguir del mismo modo que realizaría manualmente una operación de fabricación con sus manos, puede seguirla y reproducirla con un robot.
Introducción
RoboDK TwinTrack ofrece una nueva forma de enseñar a los robots mediante demostraciones y puede utilizarse para muchas aplicaciones de fabricación como pintura, pulido, desbarbado, dosificación, soldadura, etc ...
Una ventaja de utilizar un método de enseñanza por demostración como TwinTrack es que puede imitar la operación de fabricación con su y el robot reproducirá el mismo movimiento. Este método de programación de robots no requiere que utilice modelos en 3D. Tampoco requiere que un operario utilice un ordenador. Esto le permitirá ahorrar una cantidad significativa de tiempo y podrá empezar a programar robots más rápidamente.

RoboDK TwinTrack requiere un sistema de medición 6D y una sonda manual o una herramienta de fabricación manual que le permita imitar la operación de fabricación con las manos.
RoboDK es compatible con más de 1000 robots de 90 fabricantes de robots diferentes. Esto significa que puede programar cualquier brazo robótico compatible con RoboDK. También puede crear sus propios robots y mecanismos.
Con las herramientas de calibración TwinTrack y RoboDK podrá crear programas de robot de gran precisión. Con un buen sistema de medición, puede alcanzar una precisión de posición de hasta 0,150 mm. El nivel de precisión depende en gran medida de la calidad y el tamaño del robot. Utilizando las herramientas de calibración de RoboDK podrá crear con precisión su gemelo digital.
Requisitos
Es necesario instalar el Addin TwinTrack de RoboDK y disponer de un sistema de medición compatible para utilizar las herramientas TwinTrack.
Asegúrese de tener lo siguiente:
1.Uno o varios brazos robóticos industriales.
2.Un sistema de medición compatible (6 DOF). Los sistemas de medición admitidos incluyen:
a.Rastreadores HTC Vive (SteamVR)
b.Kit completo de realidad virtual (SteamVR)
c.Rastreador láser con capacidad para 6 DOF y controlador RoboDK compatible
d.Creaform C-Track
e.Sistema de cámara OptiTrack (se recomienda utilizar 4 PrimeX13 para una mayor precisión)
1.Es necesario instalar el software RoboDK e instalar una licencia adecuada para TwinTrack.
2.Necesita controladores de robot compatibles para su controlador de robot si desea ejecutar automáticamente programas de robot.
3.Instale el Addin TwinTrack RoboDK:
a.Descargue el Addin TwinTrack (archivo .rdkp).
b.Haga doble clic en el archivo para instalar el Addin y abrirlo en RoboDK.
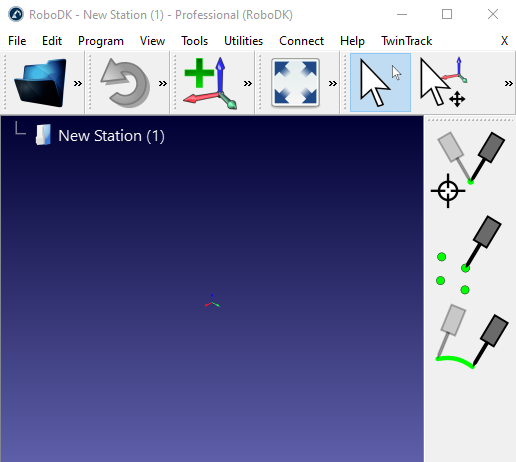
c.Si no ve el menú TwinTrack: seleccione Herramientas➔ Administrador de Addins y haga doble clic en TwinTrack para ver el menú TwinTrack en la parte superior derecha.
Configuración con rastreadores SteamVR y HTC Vive
Esta sección le guía a través de los pasos para configurar SteamVR. Puede utilizar una herramienta hecha a medida con un rastreador para imitar sus operaciones de fabricación con la mano para que su robot pueda reproducir el mismo movimiento.
RoboDK TwinTrack es compatible con sistemas de realidad virtual y con todos los rastreadores compatibles con SteamVR, incluidos los rastreadores HTC Vive de la v1 a la v3.
Siga estos pasos para configurar su sistema SteamVR para TwinTrack:
1.Instale Steam si aún no lo ha hecho, puede que necesite crear una cuenta en Steam.
2.Instale SteamVR, se trata de una extensión de Steam que añade soporte para Realidad Virtual y Seguimiento 6D.
3.Elimine la necesidad de tener auriculares de realidad virtual si no los tiene o no los necesita siguiendo estos pasos:
a.Edite el siguiente archivo con un editor de texto:
C:\Archivos de programa (x86)\Steam\steamapps\common\SteamVR\drivers\null\resources\settings\
default.vrsettings
y configure
"enable": true, (por defecto es false)
b.Edite el siguiente archivo con un editor de texto:
C:\Archivos de programa (x86)\Steam\steamapps\common\SteamVR\resources\settings\
default.vrsettings
y configure
"requireHmd": false, (por defecto es true)
"forcedDriver": "null", (por defecto está vacío "")
"activateMultipleDrivers": true, (por defecto es false)
Cierre SteamVR y vuelva a abrirlo.
4.Abra SteamVR y siga las instrucciones para configurar su sistema. Puede aceptar todos los ajustes predeterminados si no utiliza un casco de RV.
5.Empareje un rastreador como sonda:
a.Mantenga pulsado el botón de encendido del rastreador durante 2 segundos para encenderlo (la luz del rastreador debería volverse azul en el caso de un rastreador no emparejado).
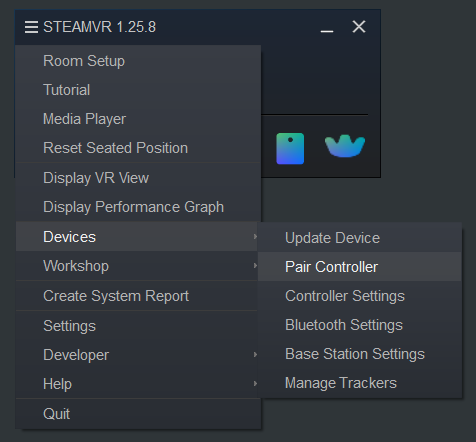
b.Abra el menú➔ Dispositivos➔ Par Controlador
c.Seleccione la opción: HTC ViveTracker. El rastreador debería emparejarse automáticamente y la luz del rastreador debería volverse verde.
Para eliminar el enlace puede mantener pulsado el botón de encendido durante 2 segundos y la luz debería volverse azul (puede parpadear).
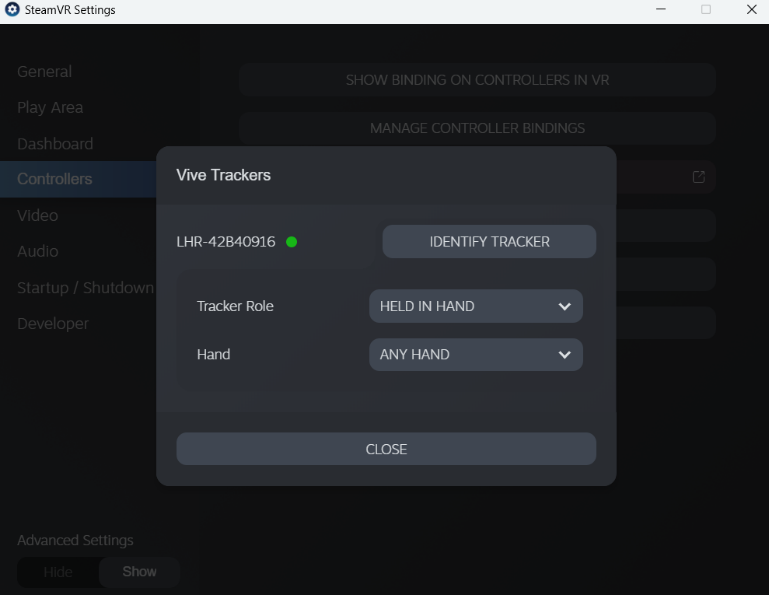
6.Establezca el papel del rastreador como Retenido en mano.
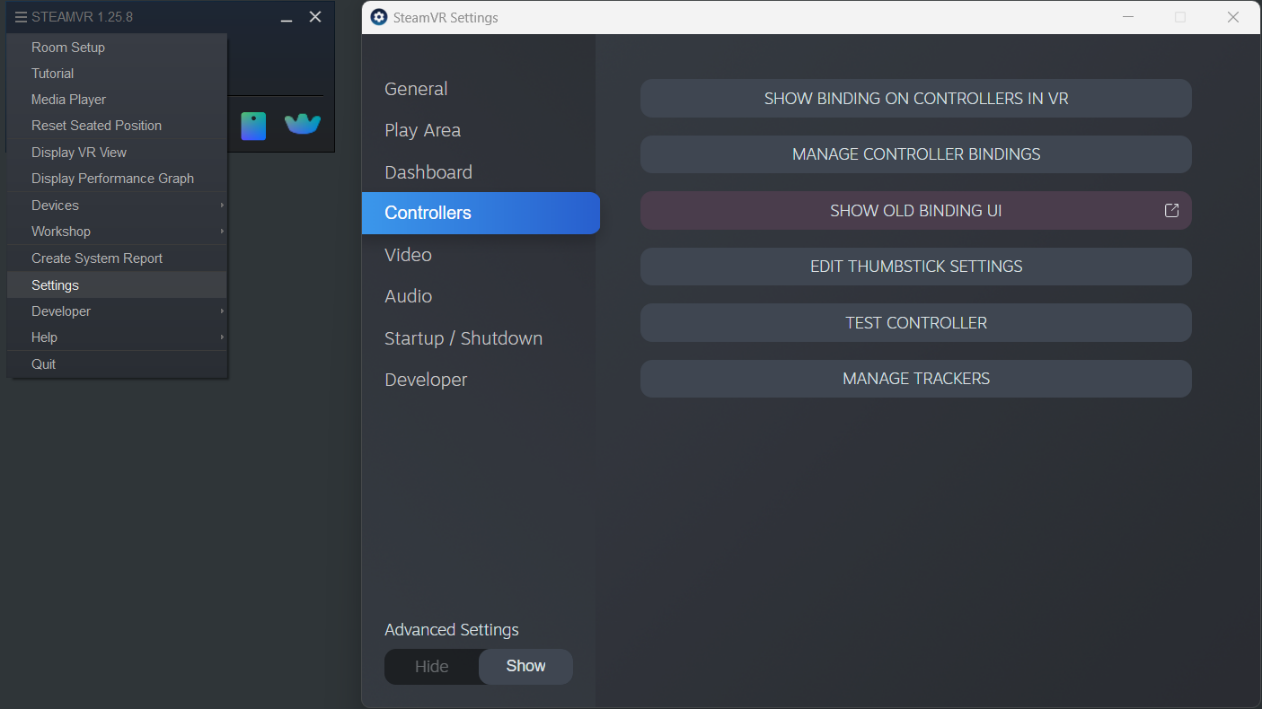
a.Seleccione el menú SteamVR➔ Configuración
b.Seleccionar controladores
c.Seleccione Gestionar rastreadores
d.Set Tracker Role➔ Sostenido en la mano
e.Fijar en Cualquier mano (por defecto)
7.Personalice las fijaciones de sus mandos:
a.Seleccione la configuración de SteamVR ➔
b.Configurar ajustes avanzados➔ Mostrar
c.Seleccionar controladores
d.Seleccione Mostrar IU de fijaciones antiguas
e.Seleccione RoboDK
f.Seleccione el Controlador actual y ajústelo a Vive Tracker en mano (a menos que ya estuviera ajustado).
g.Seleccione Editar en la encuadernación actual
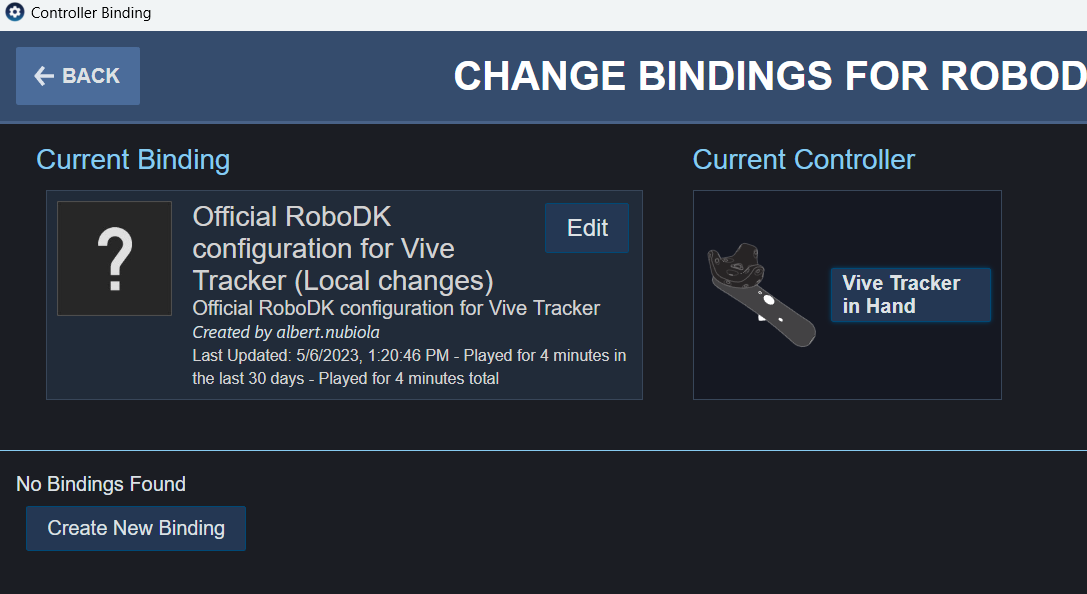
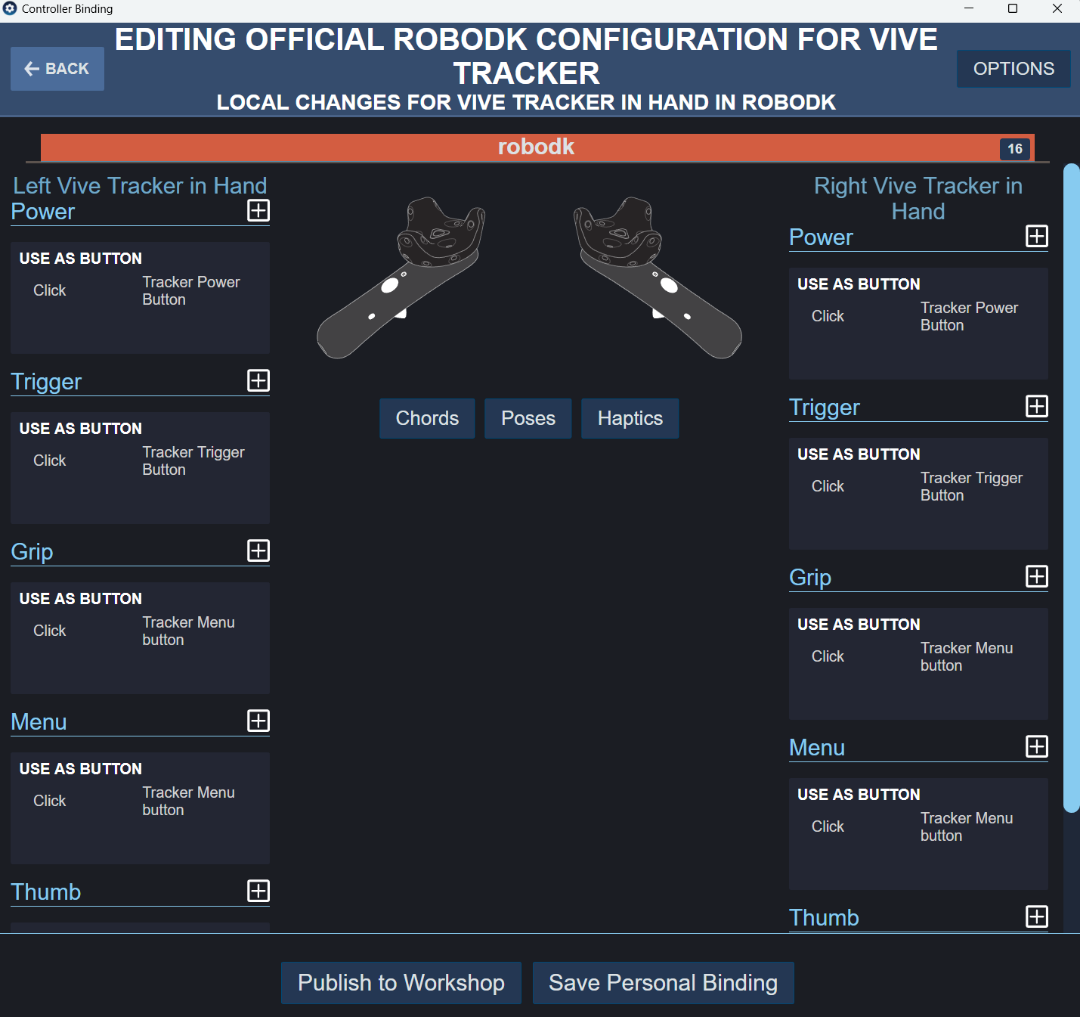
h.Debería ver los enlaces predeterminados para el rastreador.
Configuración
Para utilizar el sistema TwinTrack es necesario cargar el robot en RoboDK y conectarlo al robot y al sistema de medición. Opcionalmente podemos modelar la célula añadiendo los modelos 3D de objetos y herramientas. Esto ayudará a evitar colisiones.
8.Cargue el robot:
a.Seleccione Archivo➔ Abrir biblioteca en línea. La biblioteca en línea aparecerá en RoboDK.
b.Utilice los filtros para encontrar su robot.
c.Seleccione Descargar para cargar automáticamente el robot en su estación RoboDK.
d.Como alternativa, descargue el archivo del robot directamente de la biblioteca en línea (https://robodk.com/library) y ábralo con RoboDK (archivo .robot).
9.Conecte el sistema de medición:
a.Conecte el sistema de medición a su ordenador.
b.Seleccione Conectar y conéctese a su sistema de medición. Asegúrese de que también está instalado el software necesario. Es posible que tenga que la IP del rastreador en función del sistema de medición que utilice.
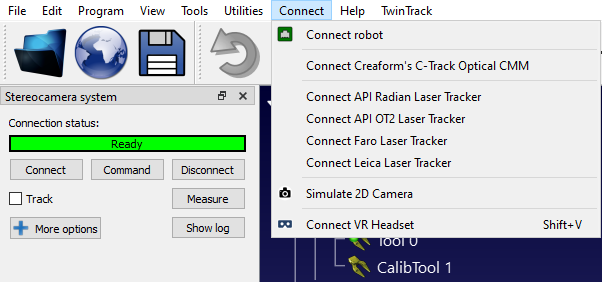
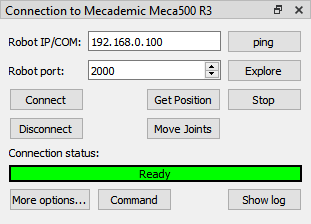
10.Conecte el robot:
a.Seleccione Conectar➔ Conectar robot.
b.Introduzca la IP y el puerto del robot.
c.Seleccione Conectar.
Calibración del sistema
Esta sección le guiará para calibrar su robot y la sonda. Este paso sólo debe realizarse una vez, pero es importante para obtener resultados de buena precisión.
Antes de iniciar el calibrado, se recomienda cargar los modelos 3D de su célula. Esto le ayudará a evitar automáticamente las colisiones durante el proceso de calibrado. Si no dispone de los modelos 3D de cada componente, puede cargar simplemente cajas de planos y esferas para representar las zonas a las que no desea acceder.
Calibración de robots
Esta sección describe cómo calibrar automáticamente su robot utilizando RoboDK TwinTrack y su sistema de medición. La calibración del robot le permite mejorar la precisión del robot hasta 0,150 mm cuando genera programas fuera de línea o utilizando TwinTrack teach by demonstration tools en RoboDK (el nivel de precisión depende en gran medida de la calidad y el tamaño del robot).
Se recomienda realizar el calibrado del robot después de construir su célula robotizada o de realizar modificaciones importantes (como cambiar la carga útil de su herramienta). Esto ayuda a obtener la mejor precisión.
Antes de comenzar la calibración, puede modelar su célula en RoboDK para evitar automáticamente las colisiones. Puede utilizar geometrías básicas como planos o cubos para evitar zonas no deseadas. También puede limitar el espacio articular del robot.
Puede seleccionar TwinTrack➔ Calibrar robot para iniciar el procedimiento de calibración del robot.
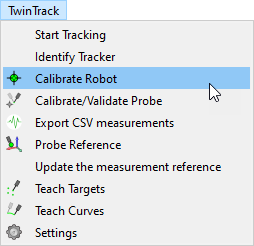
Esta operación le guiará para calibrar el robot, incluyendo la generación automática de puntos para la calibración y la validación. RoboDK puede generar automáticamente puntos visibles por el rastreador.
El procedimiento de calibración del robot requiere tomar unas 200 mediciones. El procedimiento comienza tomando algunas mediciones alrededor de la posición inicial del robot
Una vez que la configuración esté lista y la comunicación con el robot se haya establecido correctamente, el procedimiento de calibración debería durar entre 15 y 30 minutos.
El sistema no requiere útiles ni accesorios especiales, simplemente rastrea la posición de la herramienta con respecto a la referencia del rastreador.
No pasa nada si pierde algunas mediciones porque los objetivos no son visibles.
Calibración de la sonda
Es importante calibrar correctamente la punta de su sonda y asegurarse de que es precisa dentro de las tolerancias deseadas.
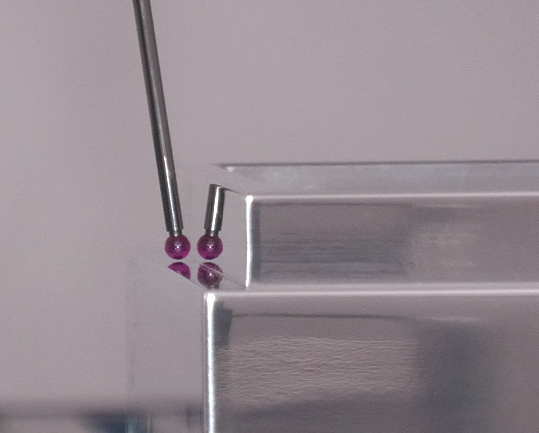
La calibración de la punta de la sonda se consigue moviendo la punta alrededor de un punto estático.
Seleccione TwinTrack➔ Calibrar/Validar punta de sonda para iniciar la calibración de la herramienta.
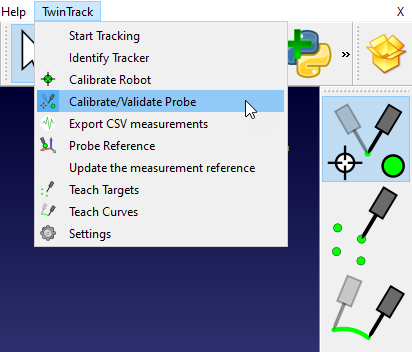
En este caso, como estamos utilizando la Creaform HandyProbe, puede calibrar la sonda con el software Creaform VXElements y validarla con RoboDK.
Para validar la punta de su sonda sólo tiene que moverse alrededor de un punto estático y RoboDK le mostrará la precisión.
Programación fuera de línea
Puede utilizar las funciones de enseñanza mediante demostración sin un robot real. Esto significa que puede simular y programar su robot fuera de línea sólo con su sistema de medición antes de tener acceso al robot real.
Simplemente necesita una pieza con un sistema de coordenadas bien definido que pueda utilizar como referencia.
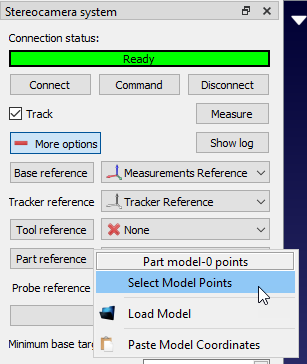
Una vez que tenga listos el sistema de medición y su pieza, puede seguir estos pasos para definir el sistema de coordenadas de su dispositivo de medición:
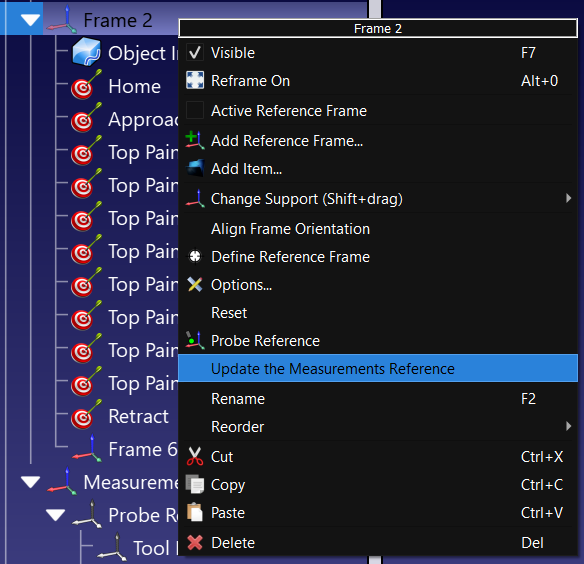
1.Haga clic con el botón derecho del ratón en el sistema de coordenadas de su pieza (o en el sistema de coordenadas de la plantilla a la que está unida).
2.Seleccione Actualizar la referencia de mediciones.
3.Siga las instrucciones de la pantalla para enseñar 3 puntos que definen el sistema de coordenadas: el origen, un punto en X+ y un punto en Y+.
El sistema de medición se actualizará en consecuencia y podrá proceder a enseñar puntos, curvas u otros sistemas de coordenadas.
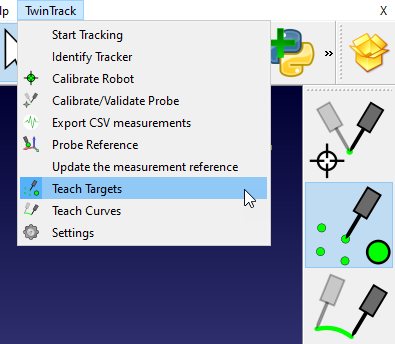
Enseñar objetivos
RoboDK TwinTrack puede crear objetivos de robot manualmente enseñando puntos con su sonda.
Puede iniciar el modo de enseñanza de objetivos seleccionando TwinTrack➔ Enseñar objetivos. Este botón también está disponible por defecto en la barra de herramientas de TwinTrack.
RoboDK calcula y muestra la posición del robot en tiempo real basándose en la posición de su mano. Podrá ver fácilmente qué zonas son alcanzables por su robot.
Con la opción de crear objetivos estará enseñando un objetivo con cada pulsación de un botón. Una vez que desee crear un programa, puede pulsar el segundo botón de su sonda y RoboDK simulará el programa:
●Primer botón: enseñar objetivos.
●Segundo botón: crear y simular el programa en RoboDK.
●Mantenga pulsado el segundo botón: ejecute el programa en el robot.
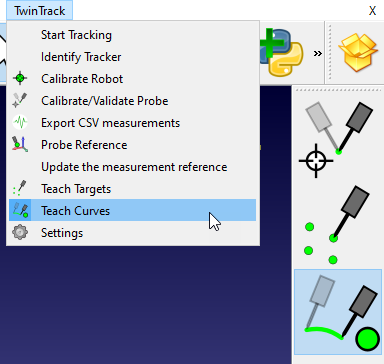
Enseñar curvas
Con RoboDK TwinTrack puede crear trayectorias o curvas de robot manualmente con su sonda.
Puede iniciar el modo de enseñar objetivos seleccionando TwinTrack➔ Enseñar curvas. Este botón también está disponible por defecto en la barra de herramientas de TwinTrack.
RoboDK calcula y muestra la posición del robot en tiempo real basándose en la posición de su mano. Podrá ver fácilmente qué zonas son alcanzables por su robot.
Puede crear una curva manteniendo pulsado el primer botón de su sonda. Una vez que desee crear un programa, puede pulsar el segundo botón de su sonda y RoboDK creará y simulará el programa:
●Mantenga pulsado el primer botón: enseñar curvas/trayectorias.
●Segundo botón: crear y simular el programa en RoboDK.
●Mantenga pulsado el segundo botón: ejecute el programa en el robot.
Enseñar un sistema de coordenadas
Con RoboDK TwinTrack puede sondear y localizar sus sistemas de coordenadas (o sistemas de coordenadas) para localizar objetos en el espacio de trabajo del robot.
Haga clic con el botón derecho del ratón en su sistema de coordenadas y seleccione Sonda de referencia.
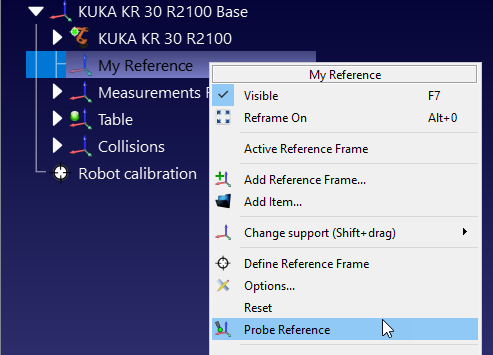
A continuación debe sondear 3 puntos en el siguiente orden:
1.Primer punto en el origen.
2.Segundo punto a lo largo del eje X positivo.
3.Tercer punto a lo largo del eje Y positivo.
Si define correctamente su sistema de coordenadas, podrá programar los robots a distancia. Por ejemplo, si tiene un sistema de coordenadas correctamente definido, cuando quiera programar una nueva pieza podrá hacerlo simplemente desde su oficina o desde casa sin ni siquiera tener que estar cerca de su robot.
Enseñar curvas en movimiento
Puede crear curvas, objetivos y sistemas de coordenadas en un objeto en movimiento si su sistema de medición admite el seguimiento de varios objetos al mismo tiempo. Esto puede hacerse siguiendo el mismo procedimiento que si fueran estáticos.
La principal diferencia es que el objeto en movimiento debe ser rastreado en tiempo real (utilizando un rastreador u objetivos reflectantes). Por ejemplo, si utiliza el sistema de medición C-Track de Creaform, deberá especificar el modelo en la sección de referencia de la pieza y vincularlo al sistema de coordenadas que representa.
Es necesario definir la dependencia correcta de los sistemas de coordenadas y los objetos en RoboDK para que pueda definir nuevos sistemas de coordenadas relativos a su objetivo móvil.
Este método de programación de piezas puede no ser tan preciso como cuando las piezas son estáticas.
Ajustes
Esta sección describe los ajustes de TwinTrack que le permiten personalizar mejor el comportamiento por defecto de las acciones de TwinTrack.
Seleccione TwinTrack➔ Ajustes para abrir la ventana de ajustes que se muestra en la siguiente imagen.
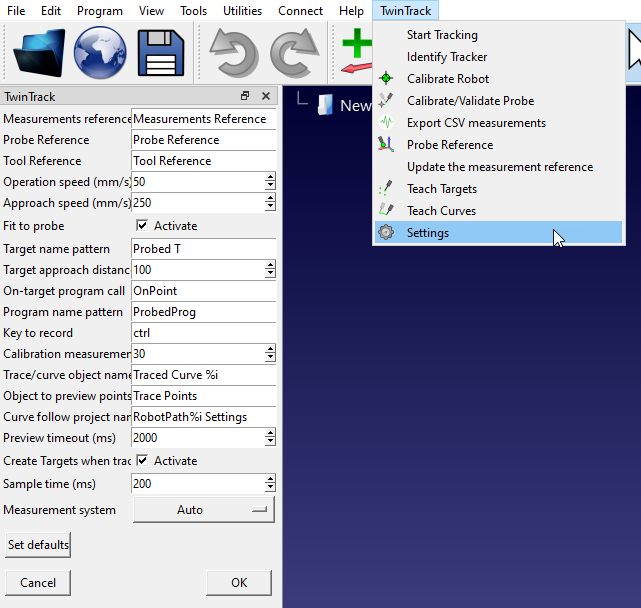
Entre otras cosas, puede cambiar los nombres por defecto utilizados para mostrar el dispositivo portátil y los sistemas de coordenadas. También puede personalizar la velocidad de aproximación distancia de aproximación.
Filtrado de programas
Una vez calibrado el robot, debemos asegurarnos de que generamos programas filtrados o tenemos en cuenta los parámetros calibrados del robot para asegurarnos de que aprovechamos la calibración del robot.
Debemos seguir uno y sólo uno de los siguientes métodos para programar robots con precisión tras el calibrado:
1.Utilice RoboDK para programación fuera de línea para generar programas precisos (los programas generados ya están filtrados). Esta es la opción de programación fuera de línea recomendada para obtener resultados de precisión óptimos.
2.Calibre los parámetros del controlador del robot (como las longitudes de enlace, los parámetros DH-DHM y/o los parámetros de masterización).
Programación precisa fuera de línea
Cuando un robot ha sido calibrado con RoboDK tenemos la opción de activar la cinemática precisa haciendo clic con el botón derecho del ratón sobre el robot y seleccionando Usar cinemática precisa.
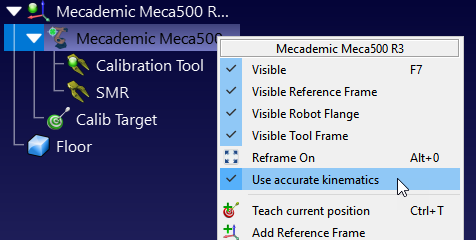
Si la precisión está activa, veremos un punto verde, si no lo está, veremos un punto rojo.
Esta es la opción recomendada para obtener unos resultados de precisión óptimos. Con la opción de precisión del robot activada en RoboDK, todos los programas generados por RoboDK se filtrarán automáticamente. Esto significa que todas las coordenadas cartesianas se modificarán ligeramente para compensar los errores del robot.
Esta es la opción más adecuada si tiene previsto utilizar sus robots para el mecanizado robotizado, programar robots a partir de archivos NC o utilizar cualquiera de los plugins CAD/CAM compatibles con RoboDK.
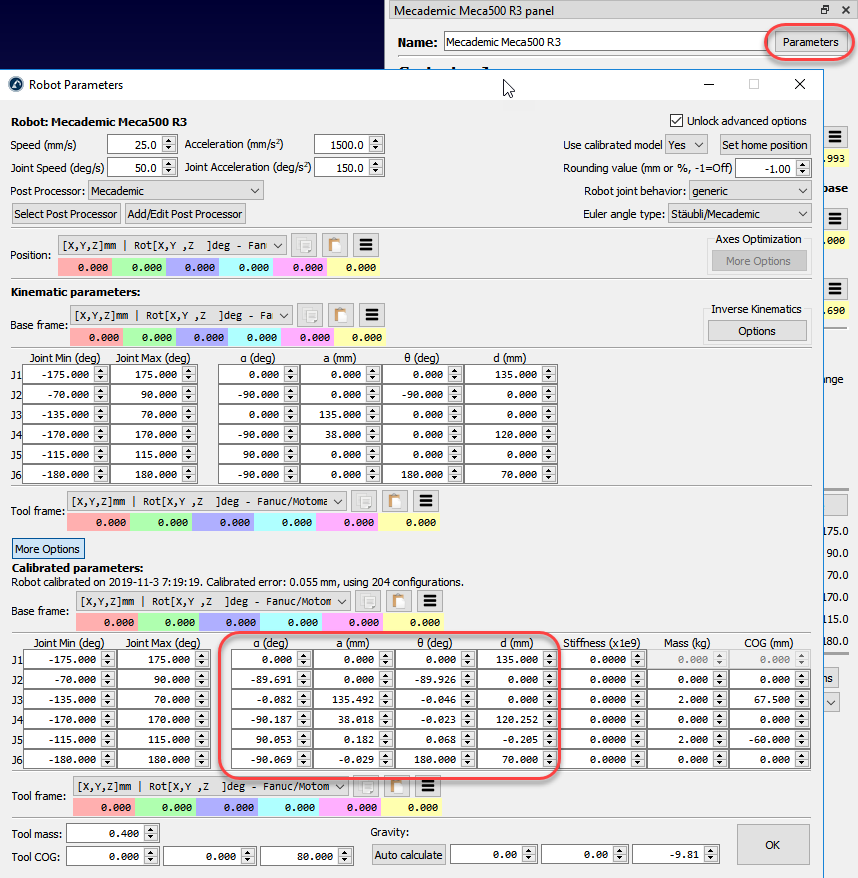
Calibrar los parámetros del robot
Puede acceder a los parámetros calibrados en el menú Parámetros una vez que se ha calibrado un robot. Algunos controladores de robot permiten modificar ciertos parámetros del robot.
Marco de referencia y marco de herramientas
RoboDK proporciona algunas utilidades para calibrar los sistemas de coordenadas y los marcos de herramientas. Puede acceder a estas herramientas desde Utilidades➔ Calibrar sistema de coordenadas y Utilidades➔ Calibrar marco de herramientas respectivamente.
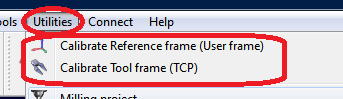
Para calibrar un sistema de coordenadas o una herramienta que no haya sido calibrada automáticamente (también conocidos como marco de usuario y TCP respectivamente) necesitamos algunas configuraciones de robot que toquen 3 o más puntos, estas configuraciones de robot pueden ser valores de articulación o coordenadas cartesianas (con datos de orientación en algunos casos). Se recomienda utilizar los valores de articulación en lugar de las coordenadas cartesianas ya que es más fácil comprobar la configuración real del robot en RoboDK (copiando-pegando las articulaciones del robot en la pantalla principal de RoboDK).
Calibrado de herramientas
Seleccione Utilidades➔ Calibrar herramienta para calibrar el TCP utilizando RoboDK. Podemos utilizar tantos puntos como deseemos, utilizando diferentes orientaciones. Un mayor número de puntos y mayores cambios de orientación es mejor, ya que obtendremos una mejor estimación del TCP, así como una buena estimación del error del TCP.
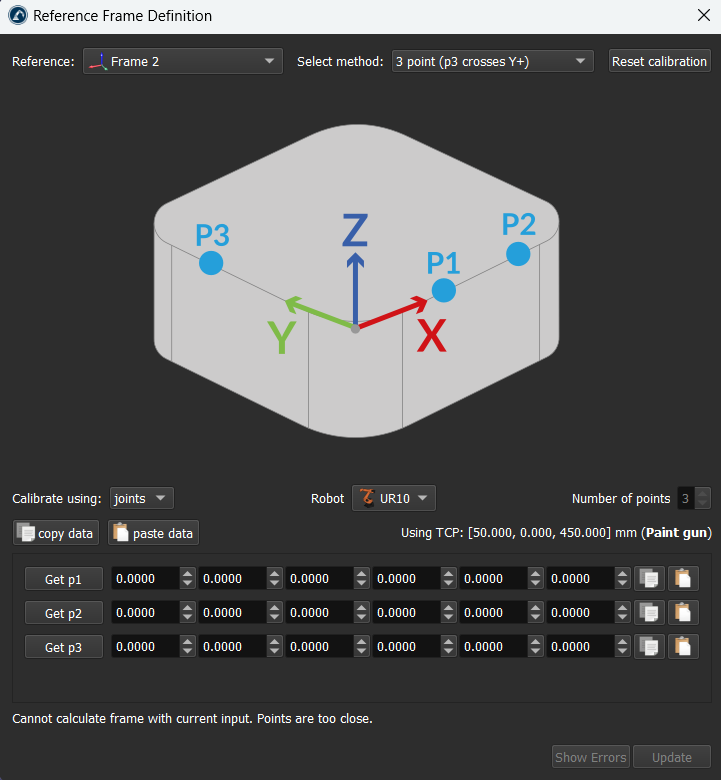
Calibración del sistema de coordenadas
Seleccione Utilidades➔ Calibrar referencia para calibrar un sistema de coordenadas. Es posible establecer un sistema de coordenadas utilizando diferentes métodos. En el ejemplo de la figura, un sistema de coordenadas está definido por tres puntos: los puntos 1 y 2 definen la dirección del eje X y el punto 3 define el eje Y positivo.
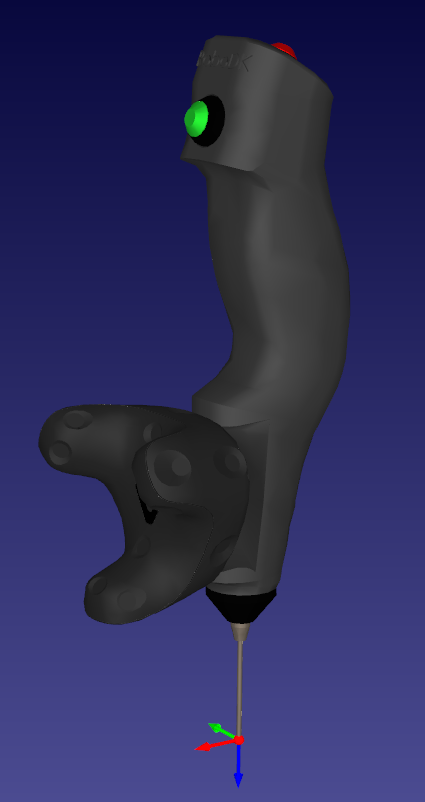
Sonda TwinTrack personalizada
Esta sección muestra cómo puede construir su sonda TwinTrack personalizada para enseñar a los robots mediante demostración. Una sonda personalizada le permite hacer que sus robots imiten las operaciones de fabricación enseñadas por un humano.

Componentes de hardware
La siguiente lista de componentes de hardware le permite construir una sonda personalizada para utilizarla con RoboDK TwinTrack.
1.Un HTC Vive Tracker (compatible con cualquier versión, se recomienda la 3.0): HTC Vive Tracker 3 En Amazon. Precio estimado: 200 EUR.

2.Dos estaciones base Valve Index. En realidad, cualquier versión debería funcionar siempre que sea compatible con el HTV Vive Tracker correspondiente. Estaciones Base Valve en Amazon. Precio estimado: 500 EUR por ambas unidades.

3.Dos trípodes para las estaciones base Valve. Pieza de muestra en Amazon. Precio estimado: 100 EUR.

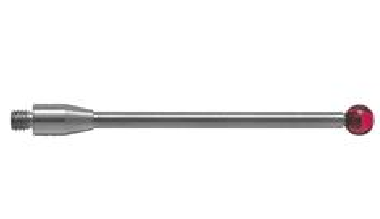
4.Una bola de rubí Renishaw de 40 mm de longitud y 4 mm de diámetro. Como la A-5003-0060. Precio estimado: 80 EUR.
5.Dos interruptores pulsadores, uno rojo y otro verde, de 12 mm de diámetro. Al pulsar el botón se enciende (cierra el circuito), al soltarlo se apaga (circuito abierto): Ejemplo de producto en Amazon. Precio estimado: 15 EUR.

6.Tres pasadores pogo con resorte 0856-0-15-20-82-14-11-0 (3 unidades). Producto de muestra de DigiKey . Precio estimado: 20 EUR.

7.Cable eléctrico para conectar los interruptores (menos de 1 m). Pedido de muestra en Amazon. Precio estimado: 25 EUR.

8.Un tornillo de cabeza hueca de botón ¼-20 x 1": Producto de muestra en Amazon abierto. Precio estimado: 10 EUR.

9.Cinco piezas impresas en 3D, el cuerpo principal, el soporte de la sonda, la sonda superior, el conector del seguidor y la tapa del conector. Puede descargar las piezas impresas en 3D necesarias para construir la sonda TwinTrack aquí. Las piezas impresas en 3D de la sonda TwinTrack también están disponibles en GrabCad y Thinginverse.


Conjunto de sonda
En esta sección se explica cómo puede montar la sonda para RoboDK TwinTrack. Necesitará las piezas necesarias para construir la sonda descrita en la sección anterior. También necesitará un kit de soldador.
Siga estos pasos para montar la sonda:
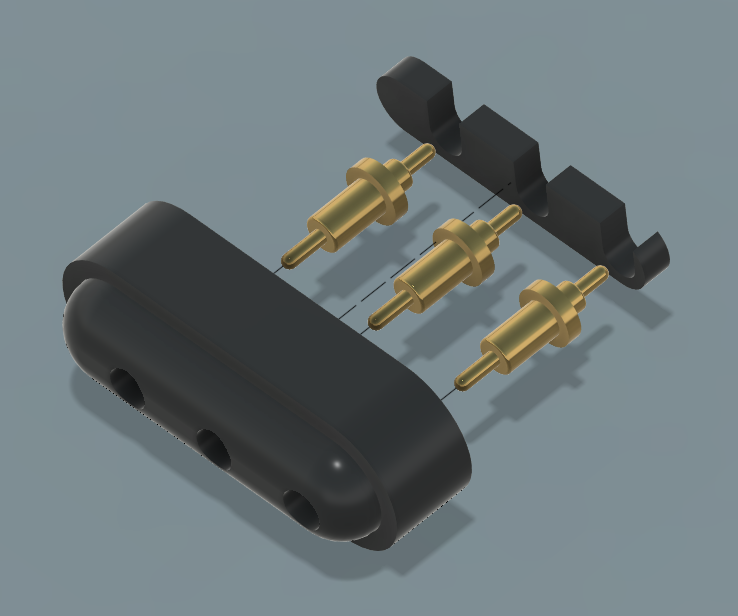
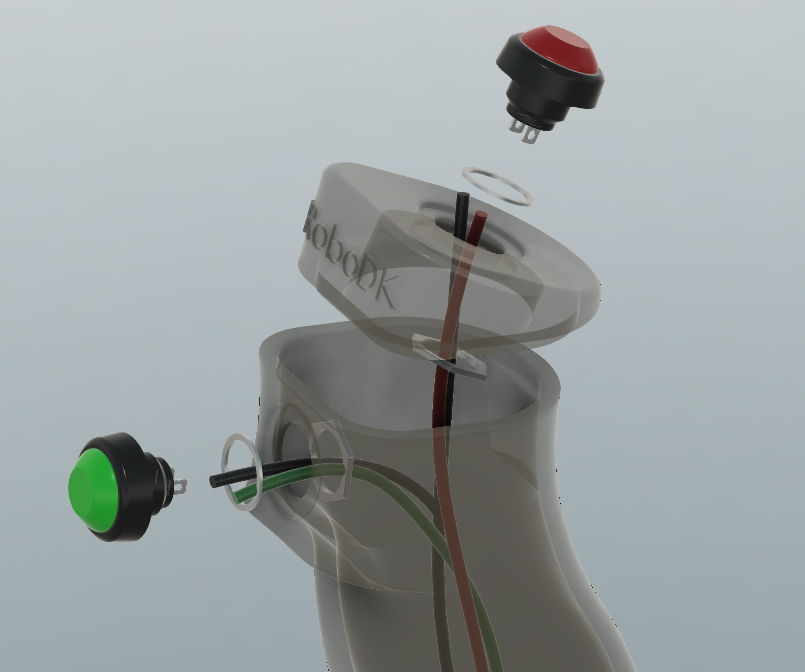
1.Monte el conector como se indica a continuación y pegue las piezas impresas.
2.Instale los cables dentro del cuerpo principal y a través de la pieza superior como se muestra en la siguiente imagen. Observe que el cable de tierra está conectado a ambos interruptores.
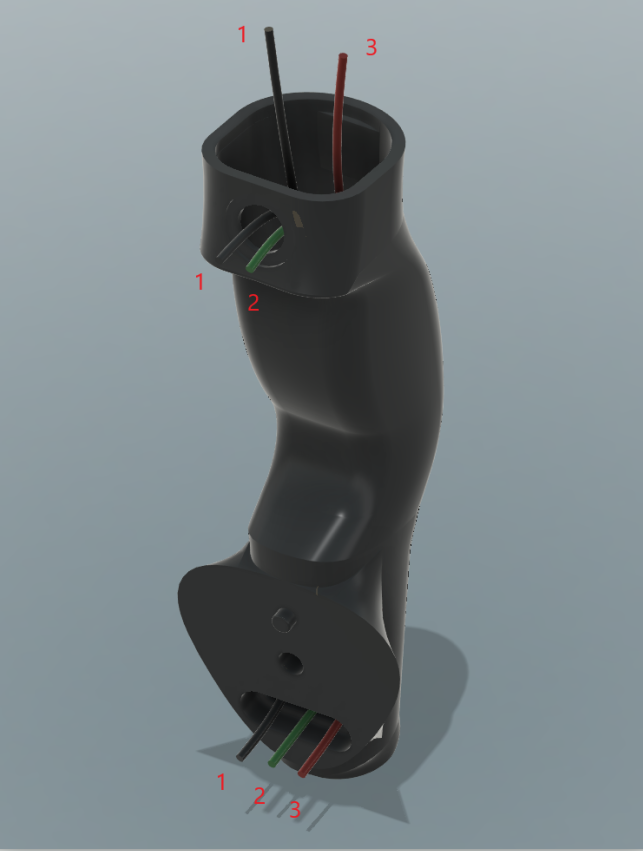
3.Conecte los cables a los interruptores. Los 2 pares de cables deben pasar por las tuercas de los interruptores. Además, el cable del interruptor rojo debe pasar por la parte superior. A continuación deberá soldar los interruptores (en este orden).
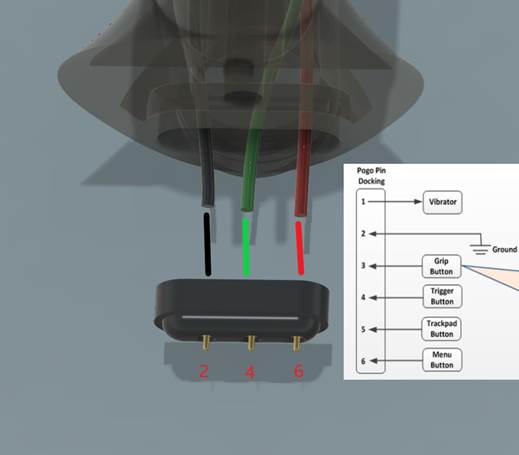
4.Suelde el conector a los cables correctos. Asegúrese de colocar los cables en los conectores correctos.
5.Monte el resto de la sonda como se muestra en la siguiente imagen.
