Utilisation de la manette
Vous devez d'abord connecter votre manette à l'appareil sur lequel vous utilisez RoboDK. L'Add-in associe des mouvements et des paramètres spécifiques du robot à des commandes standard de manette de jeu. Le mappage par défaut a été créé pour une manette Xbox One.
Remarque : l'Add-in Game Controller prend en charge plusieurs manettes. Vous pouvez également faire avancer votre robot physique à l'aide des pilotes RoboDK.
Commandes de déplacement
Cliquez sur l'icône « Lancer le contrôleur de jeu » dans la barre d'outils ou accédez à Connect-Game Controller-Lancer le contrôleur de jeu. Cela lancera l'Add-in, qui tentera automatiquement de détecter la manette connectée. Cliquez à nouveau sur l'icône « Lancer le contrôleur de jeu » pour arrêter l'Add-in.
Remarque : les mises à jour d'état seront disponibles dans la barre d'état de RoboDK, située en bas de l'écran.
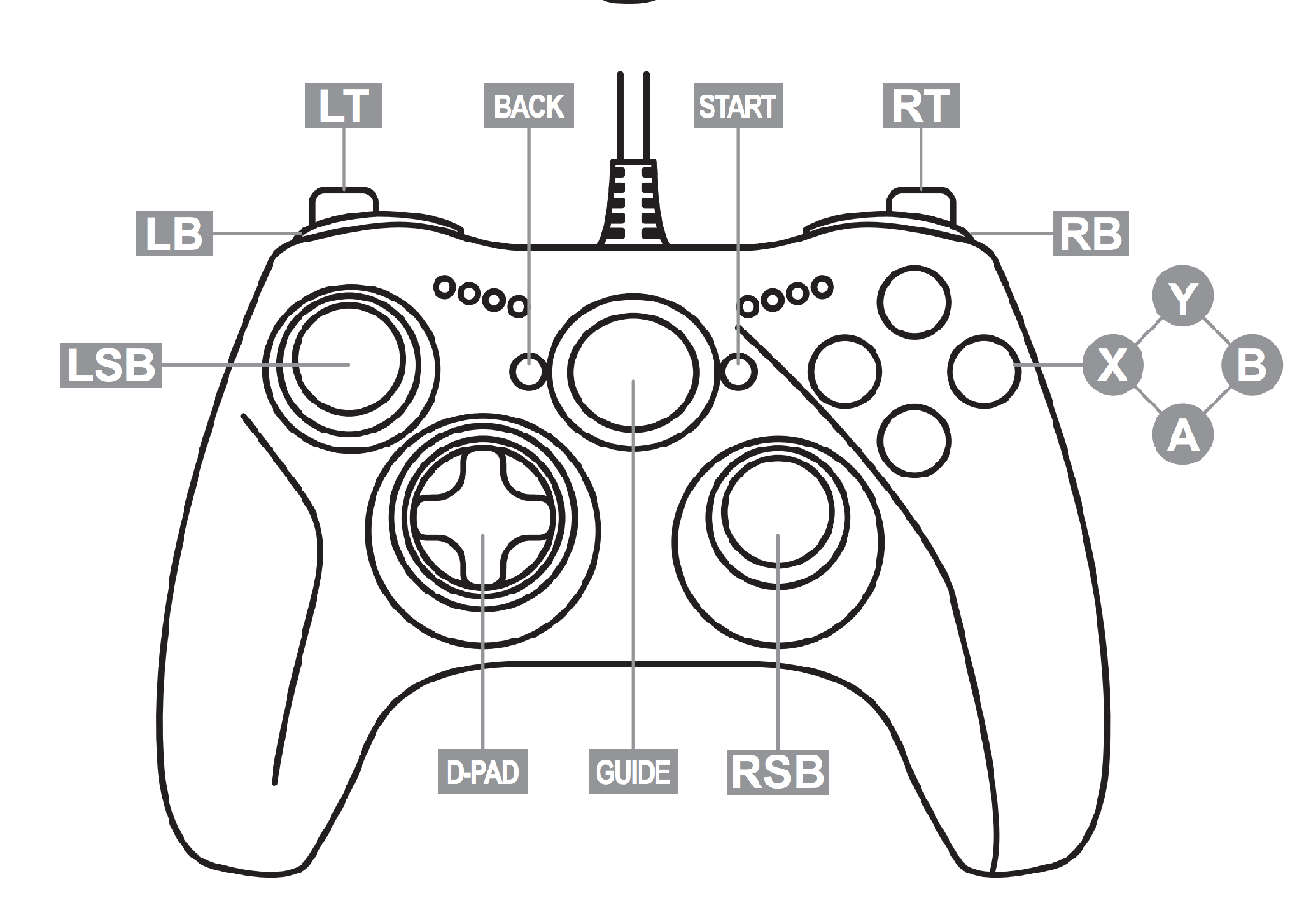
Pour déplacer le robot, vous devez sélectionner un axe et utiliser le pavé directionnel pour effectuer le mouvement.
1.Sélectionner l'axe X : maintenez la touche X de votre manette enfoncée.
2.Sélectionner l'axe Y : maintenez la touche Y de votre manette enfoncée.
3.Sélectionner l'axe Z : maintenez la touche B de votre manette enfoncée.
4.Déplacer : tout en maintenant enfoncé un bouton d'axe, utilisez le pavé directionnel vers le haut ou vers le bas pour déplacer le robot le long de l'axe sélectionné.
Commutateurs
L'add-in Game Controller propose plusieurs boutons de bascule pour personnaliser le comportement.
Voici d'autres options permettant de contrôler les mouvements de votre robot :
1.Translation vs. Rotation : Appuyez sur le bouton du joystick gauche (LSB) pour basculer entre le déplacement linéaire du robot (mm) et sa rotation (deg). La translation (mm) est utilisée par défaut.
2.MoveJ ou MoveL : Appuyez sur le bouton du joystick droit (RSB) pour basculer entre le mouvement d'articulation (MoveJ) et le mouvement linéaire (MoveL). L'instruction de mouvement par défaut est MoveJ.
3.Taille du pas : utilisez les flèches gauche ou droite du pavé directionnel pour diminuer ou augmenter l'incrément du pas de déplacement.
4.Position d'origine : Appuyez simultanément sur les deux gâchettes (LB + RB) tout en activant la protection pour ramener le robot à sa position d'origine.