Game Controller
Présentation de l'Add-in Game Controller
L'add-in de manette de jeu pour RoboDK est un outil pratique conçu pour vous permettre de piloter manuellement un robot à l'aide d'une manette de jeu standard (telle qu'une manette Xbox). Cet add-in est idéal pour enseigner rapidement des cibles, tester l'accessibilité du robot ou démontrer ses mouvements dans un environnement simulé ou réel.
Installation
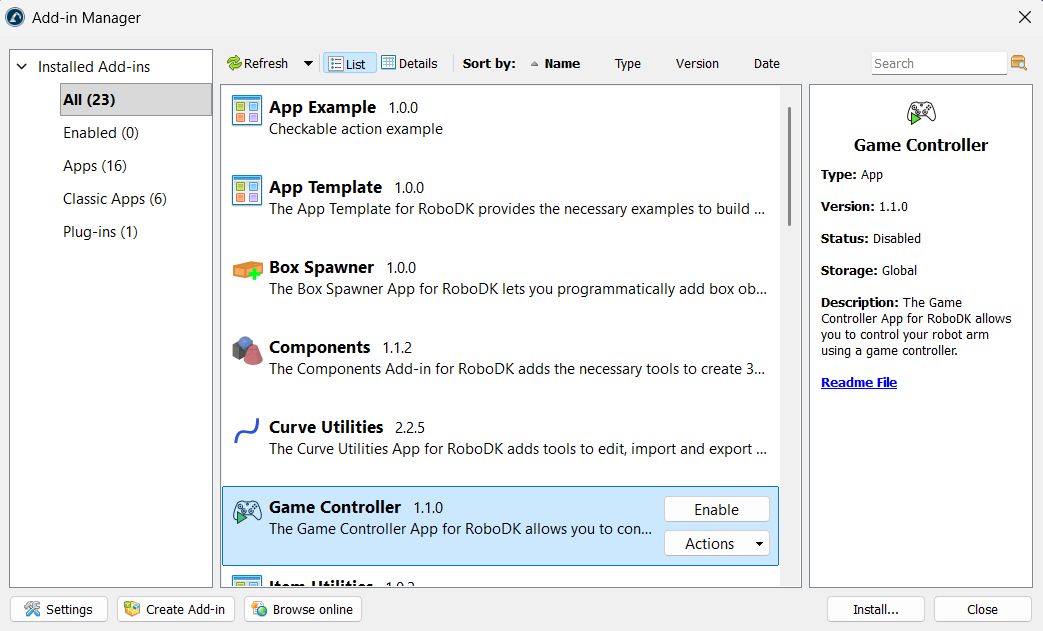
Vous pouvez installer l’Add-inGame Controller à partir de la bibliothèque en ligne RoboDK. Une autre façon de procéder à partir du logiciel RoboDK lui-même consiste à aller dans Outils > Gestionnaire de compléments et à activer l’Add-in Game Controller.
Remarque : la deuxième méthode peut ne pas fonctionner avec certaines versions plus anciennes du logiciel. Assurez-vous d'avoir installé la dernière version
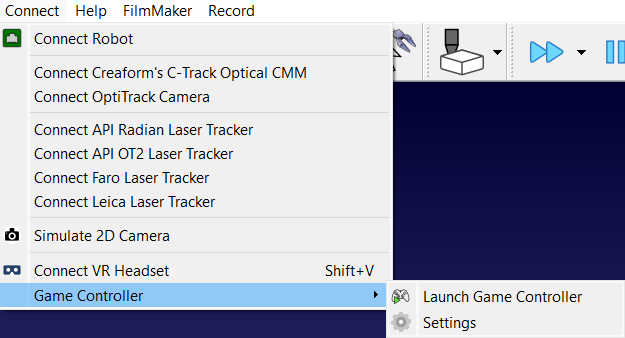
Une fois l'installation terminée, les options du contrôleur de jeu se trouvent dans le menu « Connect ». Vous trouverez également l'icône « Lancer le contrôleur de jeu » dans la barre d'outils.
Utilisation de la manette
Vous devez d'abord connecter votre manette à l'appareil sur lequel vous utilisez RoboDK. L'Add-in associe des mouvements et des paramètres spécifiques du robot à des commandes standard de manette de jeu. Le mappage par défaut a été créé pour une manette Xbox One.
Remarque : l'Add-in Game Controller prend en charge plusieurs manettes. Vous pouvez également faire avancer votre robot physique à l'aide des pilotes RoboDK.
Commandes de déplacement
Cliquez sur l'icône « Lancer le contrôleur de jeu » dans la barre d'outils ou accédez à Connect-Game Controller-Lancer le contrôleur de jeu. Cela lancera l'Add-in, qui tentera automatiquement de détecter la manette connectée. Cliquez à nouveau sur l'icône « Lancer le contrôleur de jeu » pour arrêter l'Add-in.
Remarque : les mises à jour d'état seront disponibles dans la barre d'état de RoboDK, située en bas de l'écran.
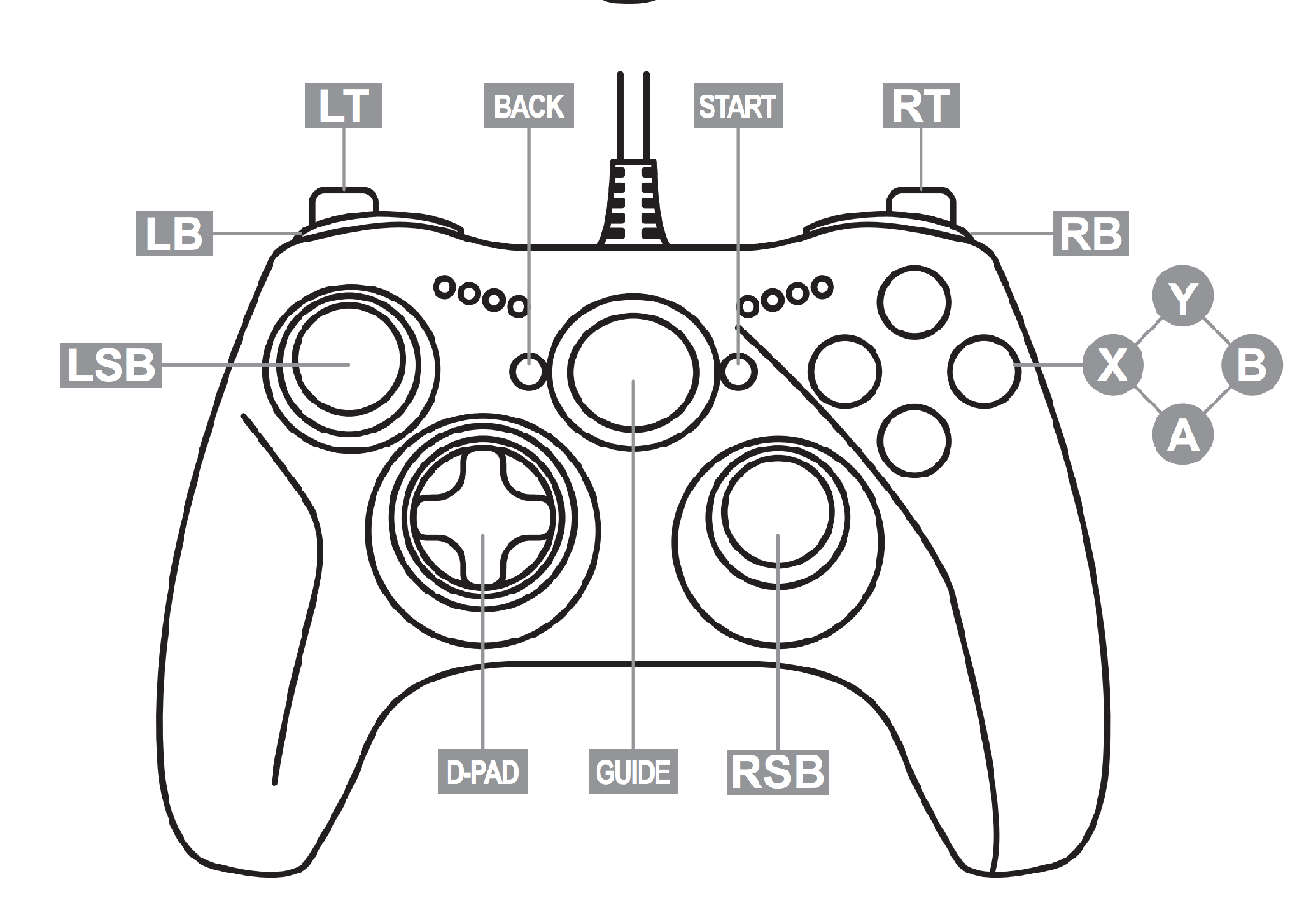
Pour déplacer le robot, vous devez sélectionner un axe et utiliser le pavé directionnel pour effectuer le mouvement.
1.Sélectionner l'axe X : maintenez la touche X de votre manette enfoncée.
2.Sélectionner l'axe Y : maintenez la touche Y de votre manette enfoncée.
3.Sélectionner l'axe Z : maintenez la touche B de votre manette enfoncée.
4.Déplacer : tout en maintenant enfoncé un bouton d'axe, utilisez le pavé directionnel vers le haut ou vers le bas pour déplacer le robot le long de l'axe sélectionné.
Commutateurs
L'add-in Game Controller propose plusieurs boutons de bascule pour personnaliser le comportement.
Voici d'autres options permettant de contrôler les mouvements de votre robot :
1.Translation vs. Rotation : Appuyez sur le bouton du joystick gauche (LSB) pour basculer entre le déplacement linéaire du robot (mm) et sa rotation (deg). La translation (mm) est utilisée par défaut.
2.MoveJ ou MoveL : Appuyez sur le bouton du joystick droit (RSB) pour basculer entre le mouvement d'articulation (MoveJ) et le mouvement linéaire (MoveL). L'instruction de mouvement par défaut est MoveJ.
3.Taille du pas : utilisez les flèches gauche ou droite du pavé directionnel pour diminuer ou augmenter l'incrément du pas de déplacement.
4.Position d'origine : Appuyez simultanément sur les deux gâchettes (LB + RB) tout en activant la protection pour ramener le robot à sa position d'origine.
Fonctions de sécurité
L'add-in comprend un mécanisme de sécurité obligatoire destiné à empêcher tout mouvement accidentel.
Les mouvements accidentels comprennent les éléments suivants :
1.Déclenchement de la sécurité : vous devez maintenir la gâchette droite (RT) enfoncée pour permettre tout mouvement du robot. Si la gâchette est relâchée, le robot ne bougera pas et l'App affichera le message suivant :
Veuillez appuyer sur la gâchette de sécurité !
2.Avertissement de configuration : le Script vérifie si le nouveau mouvement entraîne une modification de la configuration du robot (par exemple, un retournement du poignet). Si une modification est détectée, le mouvement est bloqué et l'avertissement suivant s'affiche afin d'éviter tout comportement inattendu :
La configuration du robot a été modifiée. Cela peut entraîner des mouvements inattendus ! Veuillez déplacer le robot via RoboDK ou essayer une autre commande.
3.Vérification de l'accessibilité : le système valide le mouvement à l'aide de la cinématique inverse (IK). Si la cible est hors de portée ou proche d'une singularité, les messages suivants s'affichent :
Cible inaccessible. Essayez d'utiliser MoveJ ou une autre commande.
Aucune solution robotique ! La nouvelle position est trop éloignée, hors de portée ou proche d'une singularité.
Gestion des périphériques et des robots
Le module complémentaire comprend une logique permettant de gérer plusieurs périphériques ou robots au sein de la station :
1.Contrôleurs multiples : si plusieurs contrôleurs sont connectés au PC, l’Add-in affichera un message indiquant que plusieurs contrôleurs ont été détectés et utilisera par défaut le premier détecté.
2.Robots multiples : si la station contient plusieurs robots, l'Add-in invitera l'utilisateur à « Sélectionner un robot » dans une liste. Si un seul robot est présent, il sera sélectionné automatiquement sans demander confirmation à l'utilisateur.
Remarque : si aucun contrôleur n'est détecté, ou si la connexion au contrôleur est perdue pendant le fonctionnement, l'Add-in affichera un message et se fermera. De même, s'il n'y a pas de robot dans la station, vous devez en charger un avant d'exécuter le Programme.
Simulation vs robot réel
L'add-in peut être utilisé à la fois pour la simulation hors ligne et pour le contrôle en temps réel du robot :
1.Mode Simulation : le mode par défaut pour tester les mouvements en toute sécurité au sein de la station RoboDK.
2.Mode robot réel : pour piloter un robot physique, connectez-le via Connect-Connect Robot. L'Add-in vous demandera si vous souhaitez exécuter le programme sur le robot réel plutôt que de rester en mode simulation. Lorsque vous cliquez sur Oui, il vous sera alors demandé de saisir l'adresse IP du robot, après quoi vous pourrez cliquer sur Connecter.
Remarque : assurez-vous que les vitesses du robot sont réglées à un niveau sûr dans les paramètres du robot avant de continuer.
Remarque : si aucun contrôleur n'est détecté, ou si la connexion au contrôleur est perdue pendant le fonctionnement, l'Add-in affichera un message et se fermera. De même, s'il n'y a pas de robot dans la station, vous devez en charger un avant d'exécuter le Programme.
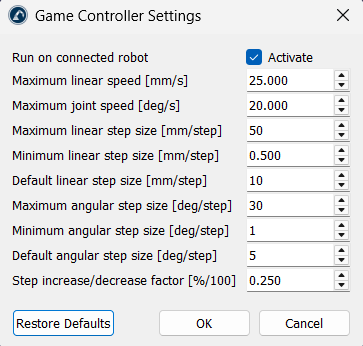
Paramètres
Vous trouverez des paramètres supplémentaires de personnalisation dans Connect-Game Controller-Settings.