Add-in IsaacSim Bridge
Le module complémentaire IsaacSim Bridge pour RoboDK permet à l'utilisateur de connecter sa scène IsaacSim à RoboDK, simplifiant ainsi la connexion à un robot réel ou la génération de programmes robotiques en fonction de ses besoins. L'extension IsaacSim implémente également le planificateur de mouvement RRT afin de faciliter l'exportation d'un parcours sans collision depuis IsaacSim vers un programme RoboDK.
RoboDK ajoute des capacités de post-traitement aux robots industriels dans Isaac Sim, générant des programmes robotiques prêts à l'emploi pour 1 200 robots industriels de 80 marques différentes.
Installez
Veuillez installer l'Add-in Isaac Sim Bridge à partir de la bibliothèque d'Add-ins. L'Add-in IsaacSim Bridge n'est pas activé par défaut dans le logiciel RoboDK.
Pour installer l'extension dans IsaacSim, il est nécessaire d'installer au préalable les modules API Python RoboDK. Veuillez suivre les étapes suivantes :
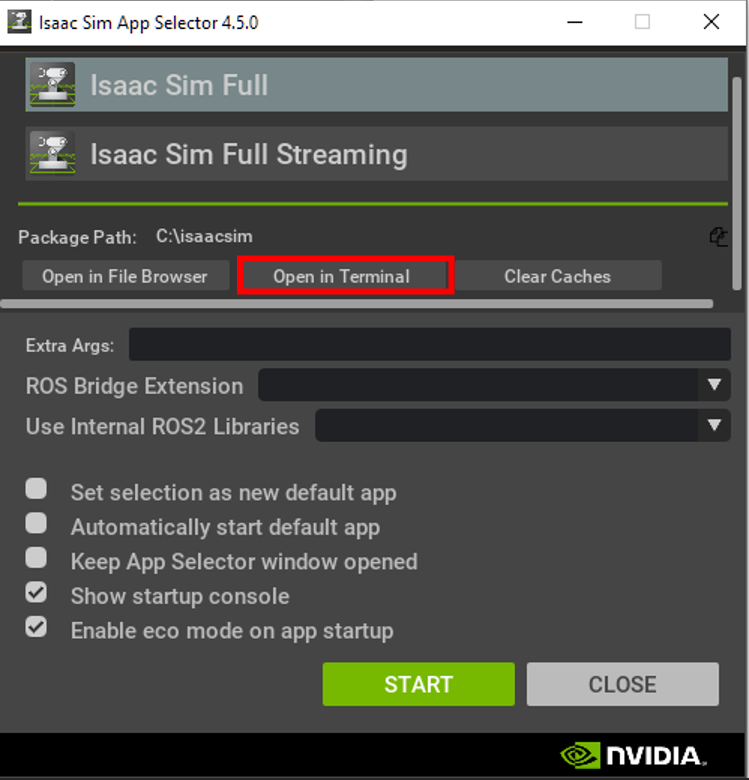
1.Veuillez ouvrir IsaacSim Selector.
2.Cliquez sur Ouvrir dans le terminal.
Exécutez la commande suivante : pip install RoboDK
Une fois le Package RoboDK installé, vous pouvez installer l'extension dans IsaacSim en suivant les étapes suivantes.
1.Installez l'Add-in dans RoboDK.
2.Veuillez ouvrir l'emplacement de l'Add-in dans votre gestionnaire de fichiers.
3.Veuillez copier le dossier RoboDK.Bridge. Il contient l'extension pour IsaacSim.
4.Collez-le dans le dossier extsUser de votre installation IsaacSim.
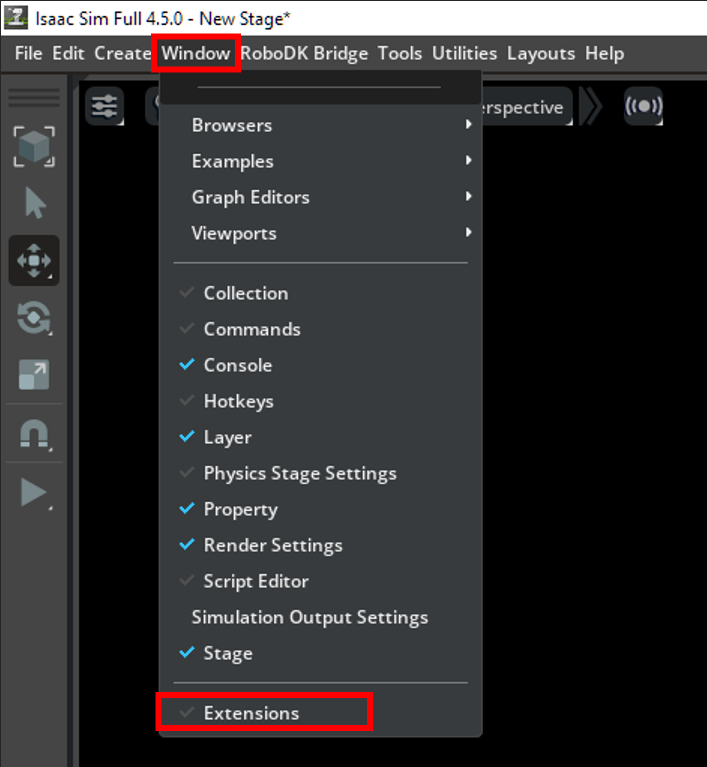
5.Lancez IsaacSim et ouvrez le gestionnaire d'extensions.
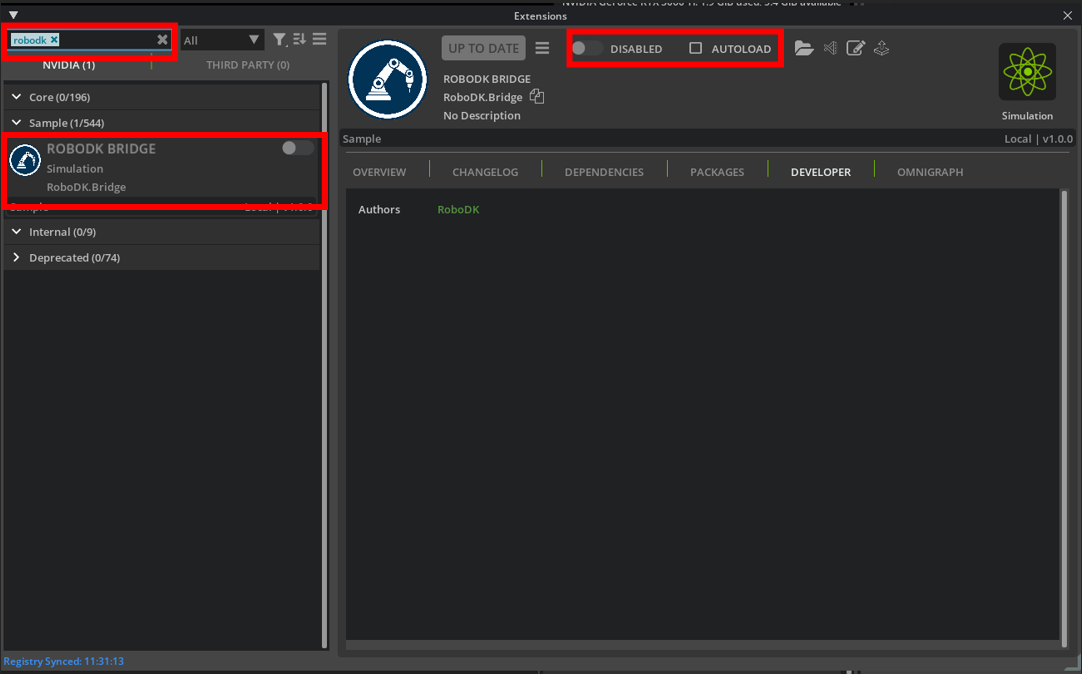
6.Recherchez RoboDK dans la barre de recherche.
7.Activez l'extension et, si vous le souhaitez, activez le chargement automatique.
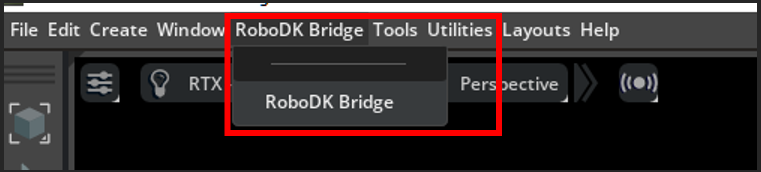
8.Le pont RoboDK devrait maintenant apparaître dans votre barre d'outils dans IsaacSim et peut être ouvert.
Fonctions du pont IsaacSim
Cette section présente les fonctions de base de l'Add-in IsaacSim Bridge dans IsaacSim.
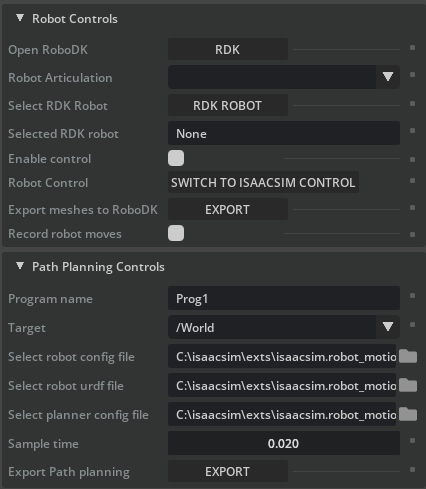
La fenêtre IsaacSim Bridge Extension contient les éléments fonctionnels suivants :
1.Commandes du robot
a.Ouvrir RoboDK : ouvre RoboDK s'il n'est pas ouvert ou se connecte à l'instance de RoboDK actuellement en cours d'exécution s'il l'est. Ceci est nécessaire pour que l'extension fonctionne.
b.Articulation du robot : sélectionnez l'articulation à utiliser dans IsaacSim.
c.Sélectionner le robot RDK : sélectionne le robot à utiliser dans la station RoboDK.
d.Robot RDK sélectionné : affiche le nom du robot sélectionné.
e.Activer le contrôle : active la communication entre le robot dans la scène IsaacSim et la station RoboDK.
f.Contrôle du robot : sélectionnez le robot de référence qui doit être utilisé comme robot à faire correspondre. Si l'option « Passer au contrôle IsaacSim » s'affiche, RoboDK agit alors comme maître et l'articulation du robot dans IsaacSim suivra la pose du robot RoboDK sélectionné.
g.Exporter des maillages vers RoboDK : Convertissez les objets Mesh de la scène IsaacSim en fichiers maillages 3D et chargez-les dans la station RoboDK. L'origine de l'objet converti se trouvera à la base de la station, mais sera décalée de manière à ce que l'emplacement actuel corresponde à son emplacement dans la scène IsaacSim. Chaque objet Mesh d'IsaacSim sera son propre objet dans la station RoboDK et pourra être déplacé.
h.Enregistrer les mouvements du robot : enregistre tous les mouvements effectués par le robot IsaacSim et les ajoute à un programme dans RoboDK. Cette fonction est utile si vous disposez d'un programme dans IsaacSim que vous souhaitez exporter vers RoboDK.
2.Commandes de planification de parcours
a.Nom du programme : nom du programme à utiliser lors de l'exportation vers RDK.
b.Cible : menu déroulant des XForms à utiliser comme cible pour le planificateur de parcours RRT.
c.Sélectionner le fichier de configuration du robot : sélectionnez le fichier de configuration du robot à utiliser pour la planification du parcours. Le format de fichier doit être yaml.
d.Sélectionner le fichier urdf du robot : sélectionnez le fichier de définition du robot à utiliser pour la planification du parcours. Le format de fichier doit être urdf.
e.Sélectionner le fichier de configuration du planificateur : sélectionnez le fichier de configuration du planificateur à utiliser pour la planification du parcours. Le format de fichier doit être yaml.
f.Temps d'échantillonnage : sélectionnez le temps d'échantillonnage à utiliser lors de la génération du parcours. Un temps d'échantillonnage plus court entraînera davantage d'instructions MoveJ dans le programme, avec des étapes plus courtes entre elles.
g.Exporter la planification de parcours : utilise RRT pour calculer un parcours entre la pose actuelle du robot et la cible sélectionnée, puis crée un programme robotique avec une liste d'instructions permettant de suivre ce parcours.