H-bot
Vous pouvez créer un robot H paramétrique en définissant des paramètres pour les poutres X, Y, le chariot et la poutre Z.
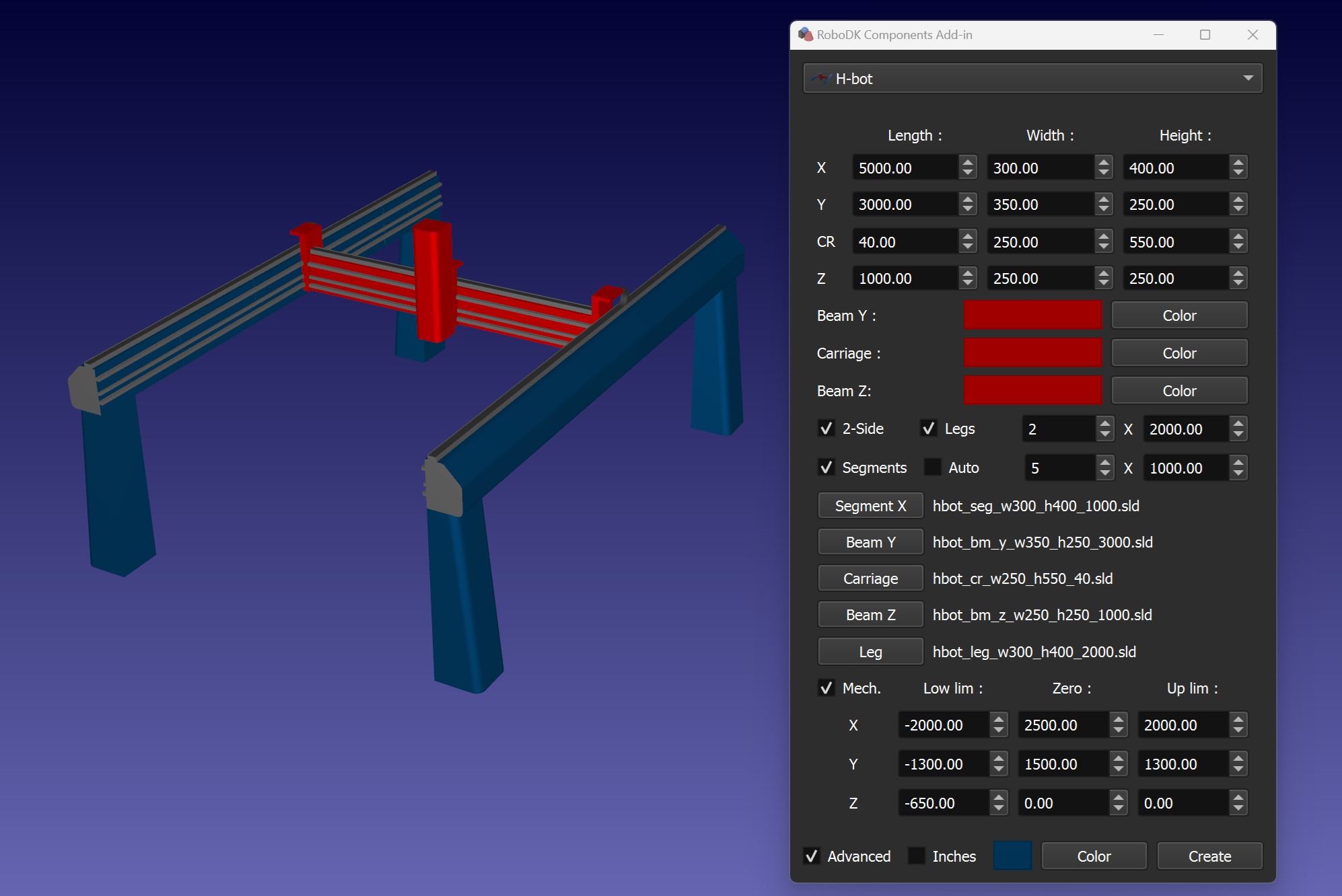
Astuce : vous pouvez créer un robot H avec une poutre X segmentée en utilisant les modèles Segment, Beam Y, Beam Z et Carriage. Il est nécessaire de définir les fichiers de modèle appropriés à l'aide des boutons Segment X, Poutre Y, Chariot et Poutre Z. Veillez à utiliser les valeurs de dimensions et le nombre de segments corrects. Utilisez la case à cocher Segments pour construire le modèle de robot H approprié.
Astuce : utilisez la case à cocher Mécanisme pour créer un mécanisme de robot H. Vous pouvez également définir les limites de mouvement et la position zéro des axes à l'aide des paramètres correspondants.
Note : Veuillez vérifier le déplacement des modèles de segments, de poutres et de chariots dans le cas où l'option Segments est utilisée. Le dossier Models contient plusieurs exemples. Par défaut, le dossier contenant les exemples de modèles est C:\NRoboDK Add-in\Ncom.robodk.app.shape\NComponents\Nmodelshbot\N.
Astuce : utilisez la case à cocher Auto pour définir les paramètres en fonction des mesures du système de coordonnées de délimitation du modèle. De petits détails du modèle peuvent affecter le résultat de la mesure. Vous pouvez décocher la case Auto après la mesure et définir les paramètres manuellement.
Astuce : utilisez la case à cocher Jambes pour ajouter le nombre requis de colonnes de base de la hauteur spécifiée.
Astuce : utilisez la case à cocher 2 côtés pour ajouter une poutre en X réfléchie.