Table tournante (3x)
Vous pouvez créer un positionneur à 3 axes en spécifiant des paramètres tels que le rayon de la bride, les décalages latéraux et horizontaux, la hauteur et les couleurs de la base, de la poutre et des brides.
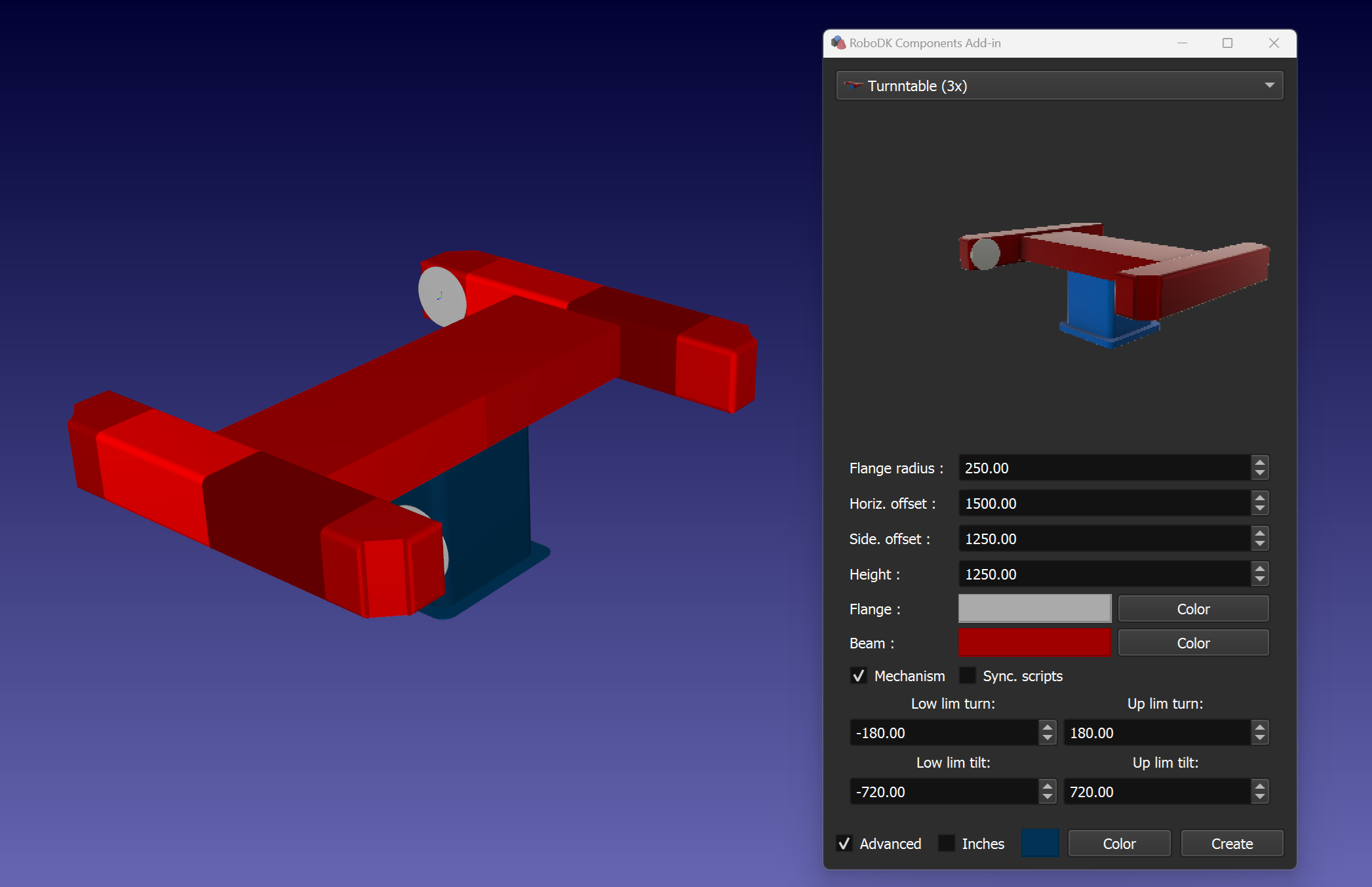
Astuce : utilisez la case à cocher Mécanisme pour créer un mécanisme de positionneur à 3 axes. Vous pouvez également définir les limites du mouvement à l'aide des paramètres correspondants.
Astuce : Utilisez la case à cocher Scripts de synchronisation pour créer des scripts Python supplémentaires qui synchroniseront le robot avec l'axe horizontal requis en exécutant le script correspondant.
Note : Par défaut, C:\RoboDK\Addins\com.robodk.app.shape\Components\scripts\ est le dossier qui contient les exemples de scripts de synchronisation.