L'Add-in Composants pour RoboDK ajoute les outils nécessaires à la création de composants visuels (objets et mécanismes 3D) dans le logiciel RoboDK.
L'Add-in des composants RoboDK vous permet également de définir les dimensions et les paramètres de configuration des composants que vous créez. Un aperçu est disponible pour vérifier que le résultat est correct
Vous pouvez définir n'importe quelle couleur et transparence pour les composants que vous envisagez de créer.
Cette section présente les fonctions de base de l'Add-in Composants.
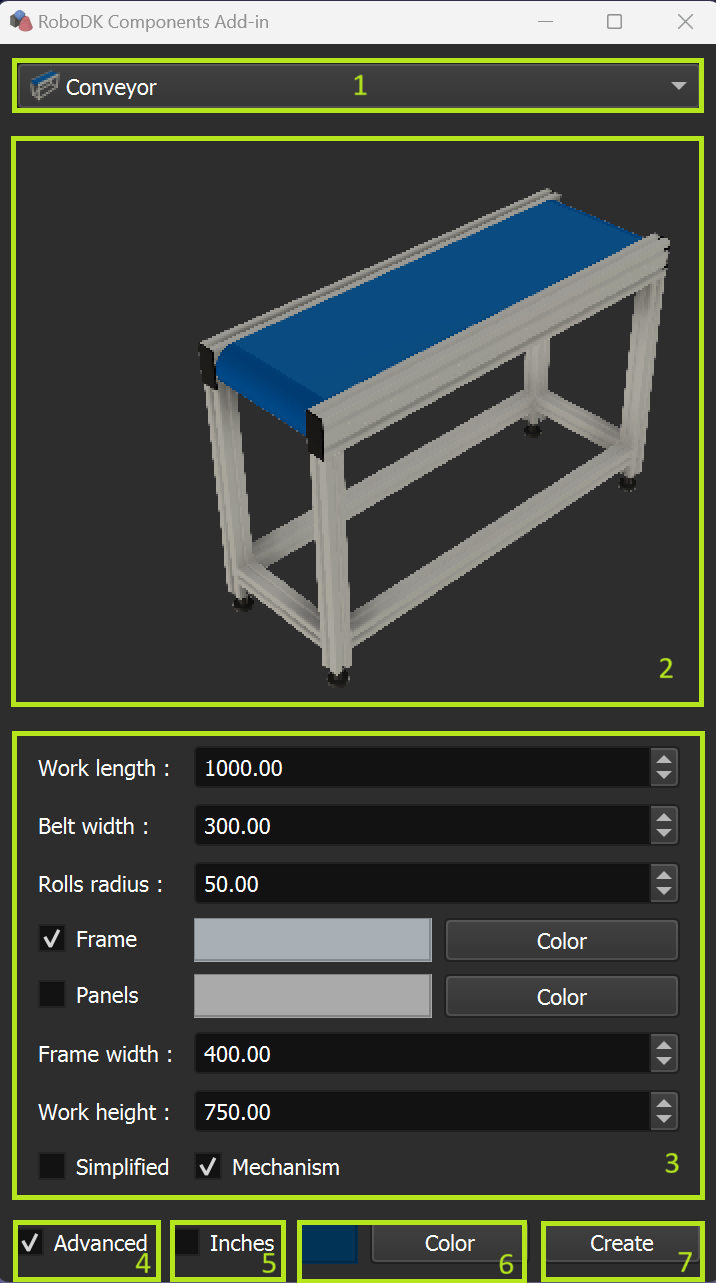
La fenêtre de l'Add-in des composants contient les éléments fonctionnels suivants :
1.Zone de liste pour la sélection des composants
2.Croquis des composants
3.Zone des paramètres du composant sélectionné
4.Case à cocher pour la visibilité des options avancées
5.Case à cocher pour utiliser les pouces (les millimètres sont utilisés par défaut)
6.Sélection de la couleur et de la transparence
7.Création de composants
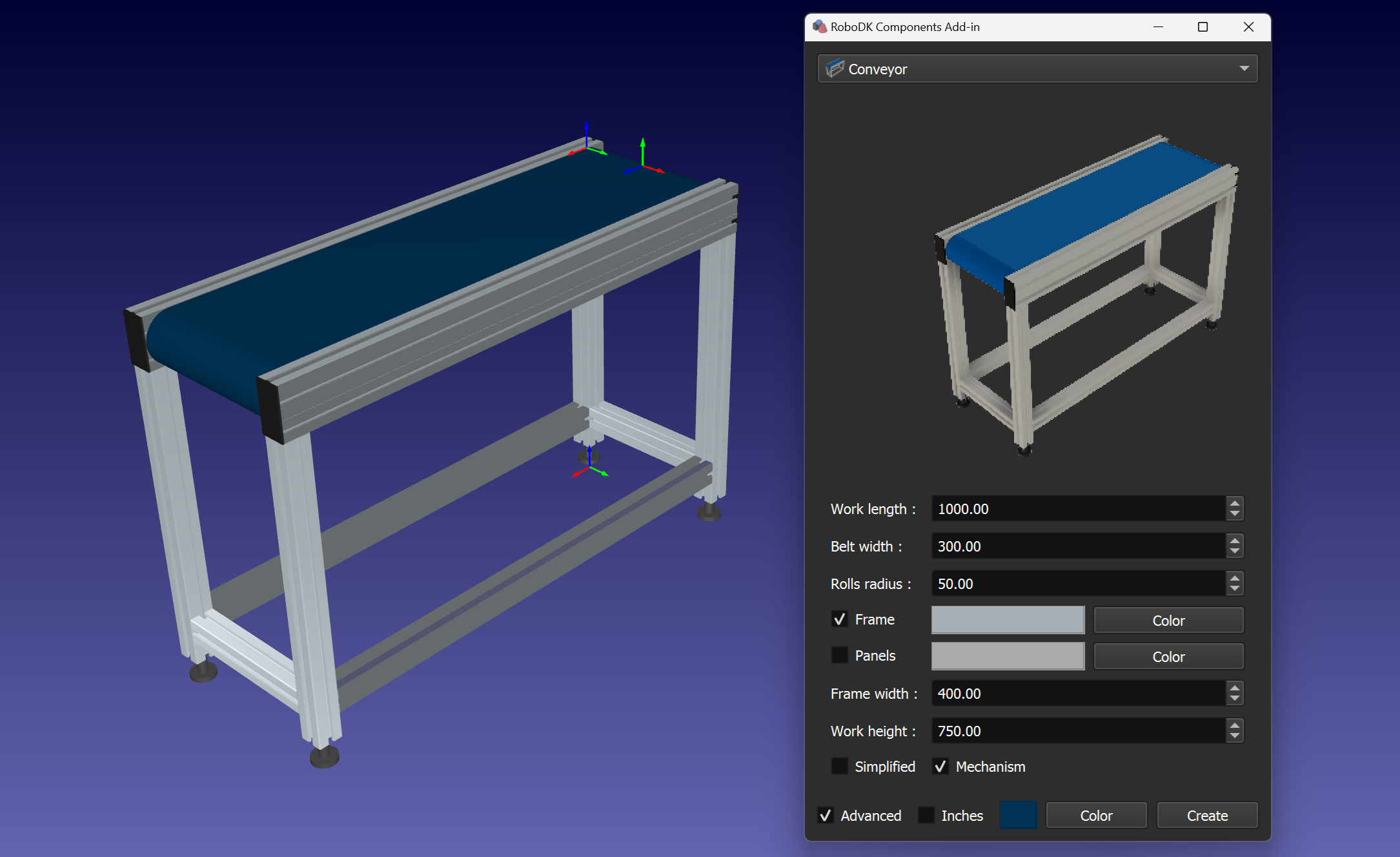
Convoyeur
Vous pouvez créer un convoyeur en spécifiant ses dimensions.
Astuce : utilisez la case à cocher Système de coordonnées avec les valeurs de taille appropriées et la boîte de dialogue Couleur pour ajouter un système de coordonnées de convoyeur.
Astuce : utilisez la case à cocher Panneaux et la boîte de dialogue Couleur correspondante pour ajouter les panneaux du système de coordonnées avec la couleur et la transparence spécifiées.
Astuce : utilisez la case à cocher Simplifié pour basculer entre un système de coordonnées simplifié et un système de coordonnées réaliste.
Astuce : utilisez la case à cocher Mécanisme pour créer un mécanisme de convoyeur.
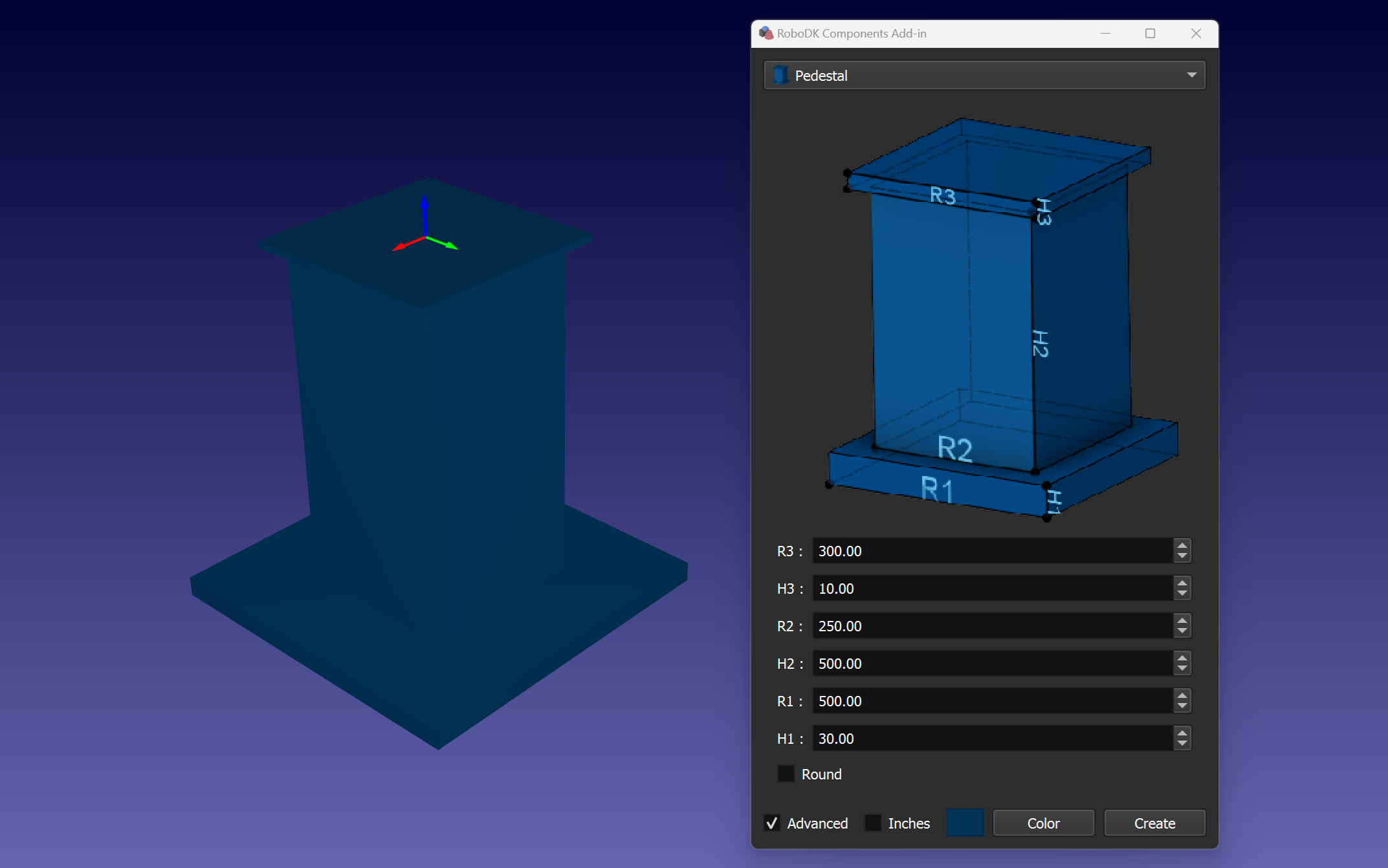
Piédestal
Vous pouvez créer un socle en spécifiant les dimensions (R1, R2, R3, H1, H2, H3).
Astuce : utilisez la case à cocher Rond pour créer un sous-sol cylindrique.
Astuce : Un système de coordonnées créé en plus, nommé Système de coordonnées du plan du piédestal N, peut être utile pour placer les objets nécessaires au centre du plan supérieur du sous-sol.
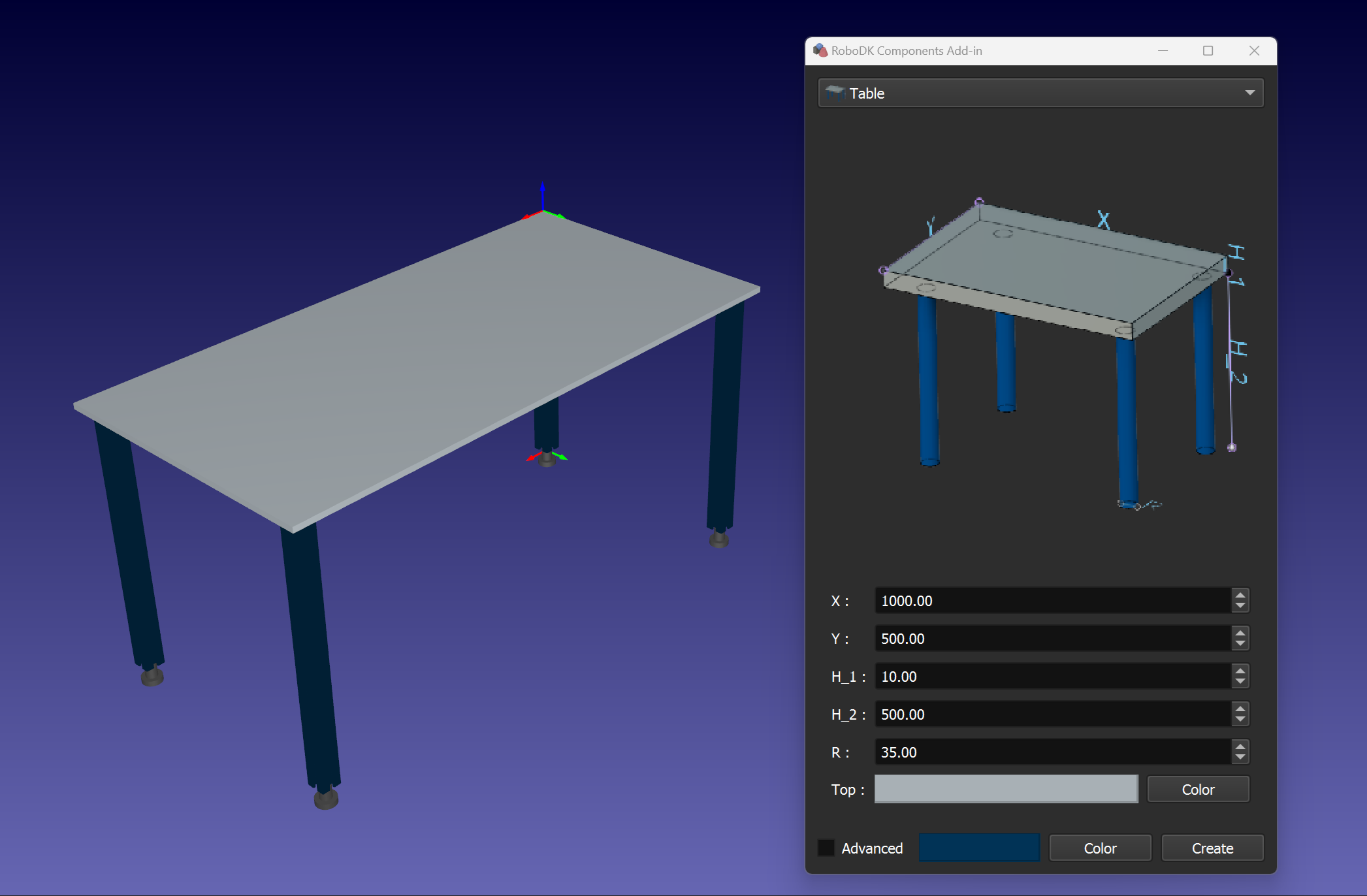
Tableau
Vous pouvez créer un tableau en spécifiant des dimensions (X, Y, R, H1, H2).
Astuce : Utilisez la boîte de dialogue Couleur pour définir la couleur et la transparence de la surface supérieure de la table.
Astuce : Un système de coordonnées supplémentaire appelé Système de coordonnées du plan de la table N peut s'avérer utile pour placer les objets nécessaires sur la surface supérieure de la table.
Astuce : utilisez la case à cocher Simplifié pour alterner entre des pieds de table simplifiés et réalistes.
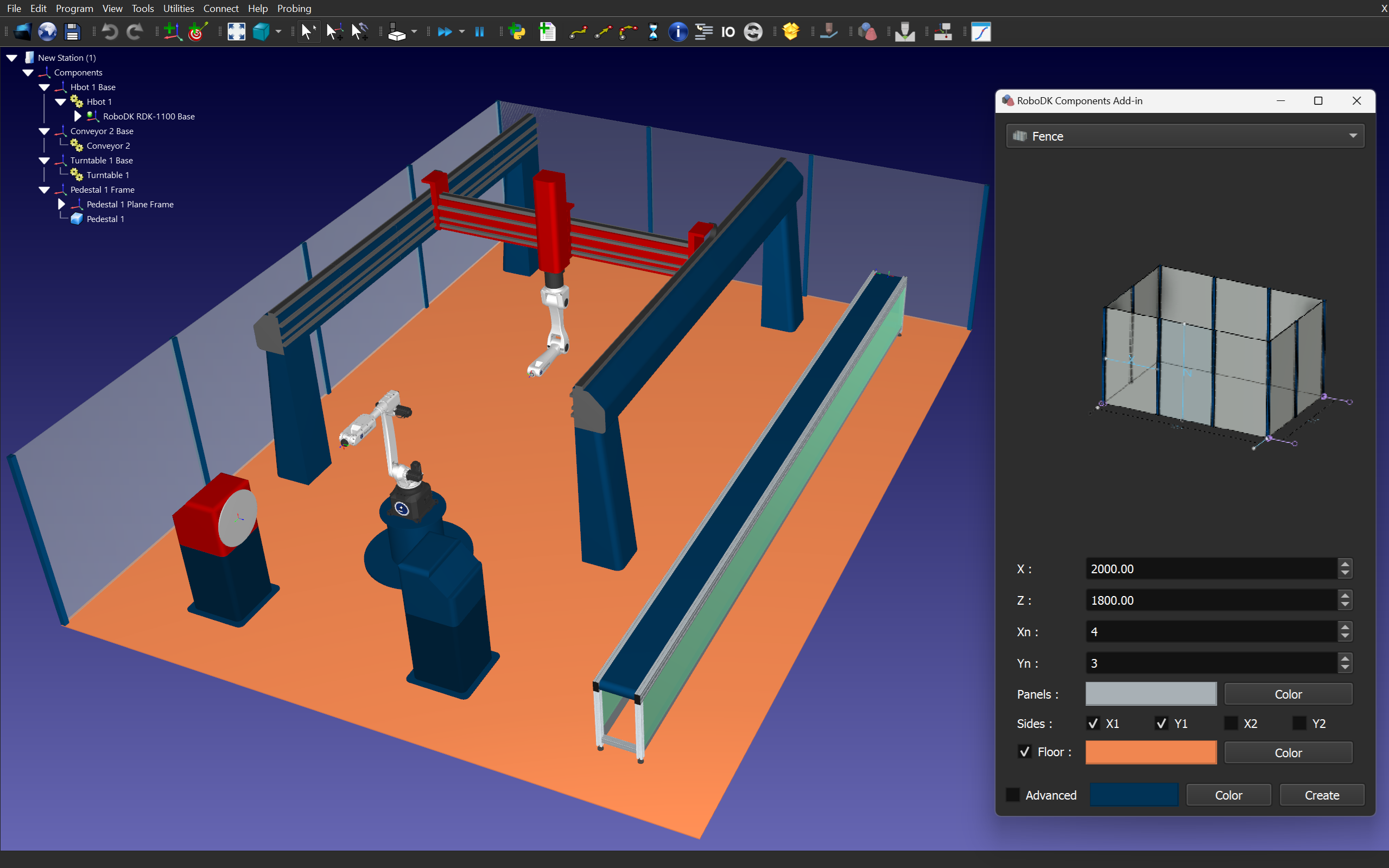
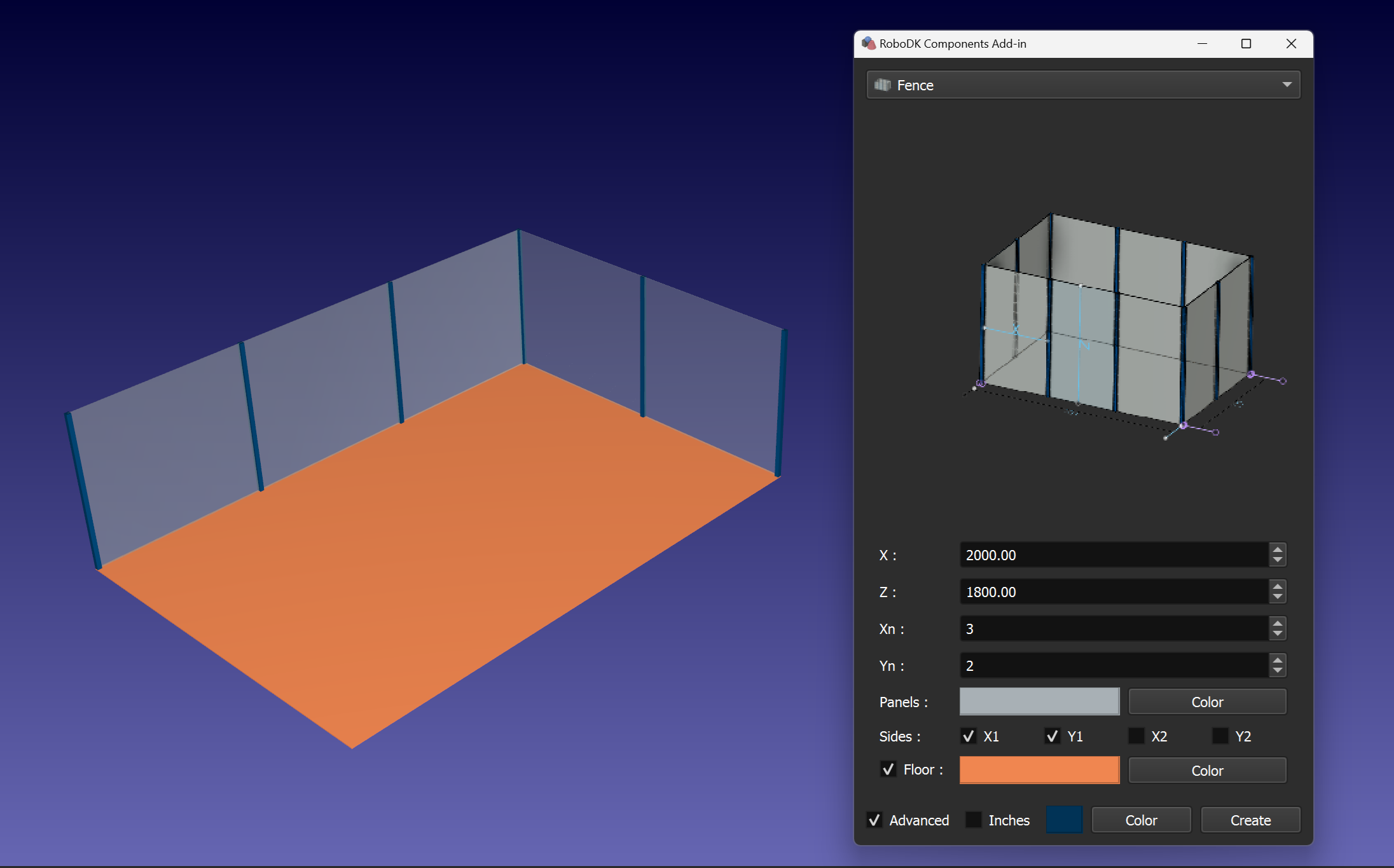
Clôture
Vous pouvez créer une clôture en spécifiant les dimensions des panneaux (X, Z) et le nombre de sections (Xn, Yn).
Astuce : utilisez la boîte de dialogue Couleur pour définir la couleur et la transparence des panneaux de clôture.
Astuce : utilisez la case à cocher Sol et la boîte de dialogue Couleur correspondante pour ajouter le sol avec la couleur et la transparence spécifiées.
Astuce : vous pouvez modifier la configuration de la clôture en cochant les cases X1, X2, Y1 et Y2.
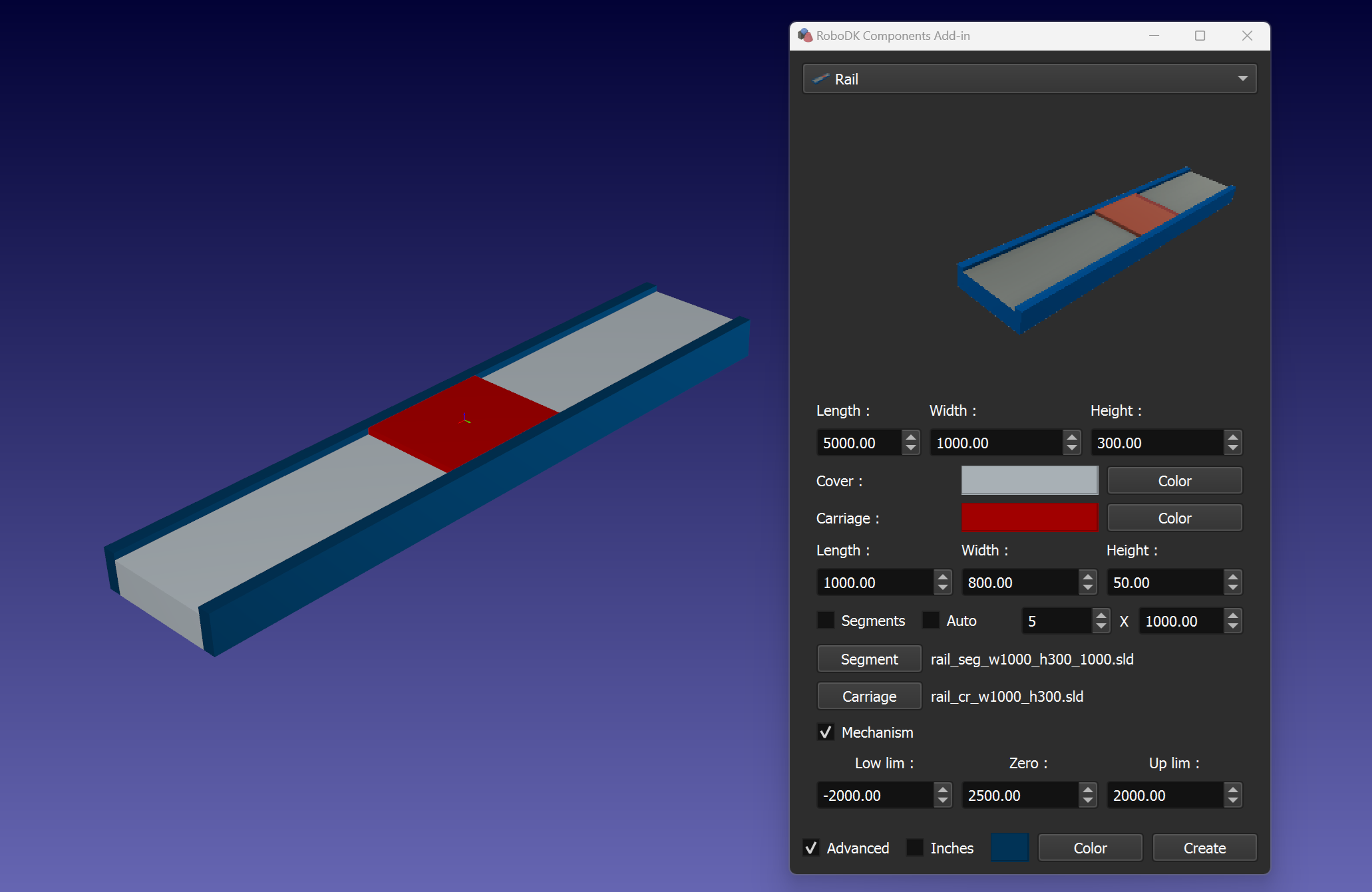
Rail
Vous pouvez créer un rail en spécifiant des paramètres tels que la longueur, la largeur, la hauteur et la couleur du patin et du chariot.
Astuce : Vous pouvez créer un rail segmenté en utilisant les modèles des segments de base et du chariot. Il est nécessaire de définir les fichiers modèles correspondants à l'aide des boutons Segment et Chariot. Veillez à utiliser les bonnes valeurs de dimensions et le bon nombre de segments. Utilisez la case à cocher Segments pour construire le modèle de rail correspondant.
Astuce : utilisez la case à cocher Mécanisme pour créer un mécanisme de rail. Vous pouvez également définir les limites de mouvement et la position zéro du chariot à l'aide des paramètres correspondants.
Note : Veuillez vérifier le déplacement des segments et des modèles de chariot dans le cas où l'option Segments est utilisée. Le dossier Models contient plusieurs exemples. Par défaut, le dossier contenant les exemples de modèles est C:\NRoboDK Add-in\Ncom.robodk.app.shape\NComponents\Nmodelsrail\N.
Astuce : utilisez la case à cocher Auto pour définir des paramètres basés sur les mesures du système de coordonnées de délimitation du modèle. De petits détails du modèle peuvent affecter le résultat de la mesure. Vous pouvez décocher la case Auto après la mesure et définir les paramètres manuellement.
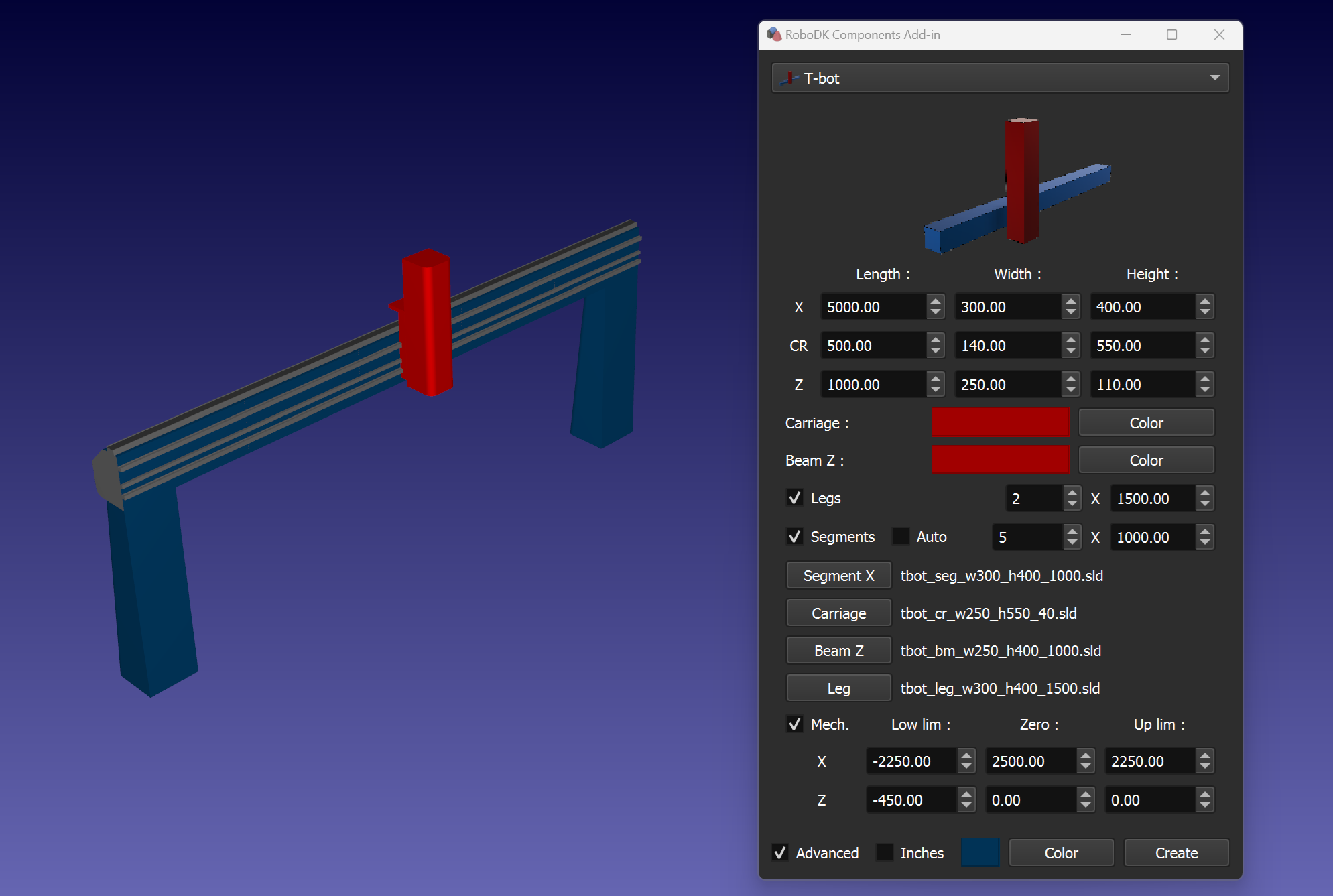
T-bot
Vous pouvez créer un robot en T paramétrique en définissant des paramètres pour la poutre X, le chariot et la poutre Z.
Astuce : vous pouvez créer un robot en T avec une poutre X segmentée en utilisant les modèles Segment, Beam Z et Carriage. Il est nécessaire de définir les fichiers de modèle appropriés à l'aide des boutons Segment X, Chariot et Poutre Z. Veillez à utiliser les valeurs de dimensions et le nombre de segments corrects. Utilisez la case à cocher Segments pour construire le modèle de robot en T approprié.
Astuce : utilisez la case à cocher Mécanisme pour créer un mécanisme de robot T. Vous pouvez également définir les limites de mouvement et la position zéro des axes à l'aide des paramètres correspondants.
Note : Veuillez vérifier le déplacement des modèles de segments, de poutres et de chariots dans le cas où l'option Segments est utilisée. Le dossier Models contient plusieurs exemples. Par défaut, le dossier contenant les exemples de modèles est C:\NRoboDK Add-in\Ncom.robodk.app.shape\NComponents\Nmodelstbot\N.
Astuce : utilisez la case à cocher Auto pour définir des paramètres basés sur les mesures du système de coordonnées de délimitation du modèle. De petits détails du modèle peuvent affecter le résultat de la mesure. Vous pouvez décocher la case Auto après la mesure et définir les paramètres manuellement.
Astuce : utilisez la case à cocher Jambes pour ajouter le nombre requis de colonnes de base de la hauteur spécifiée.
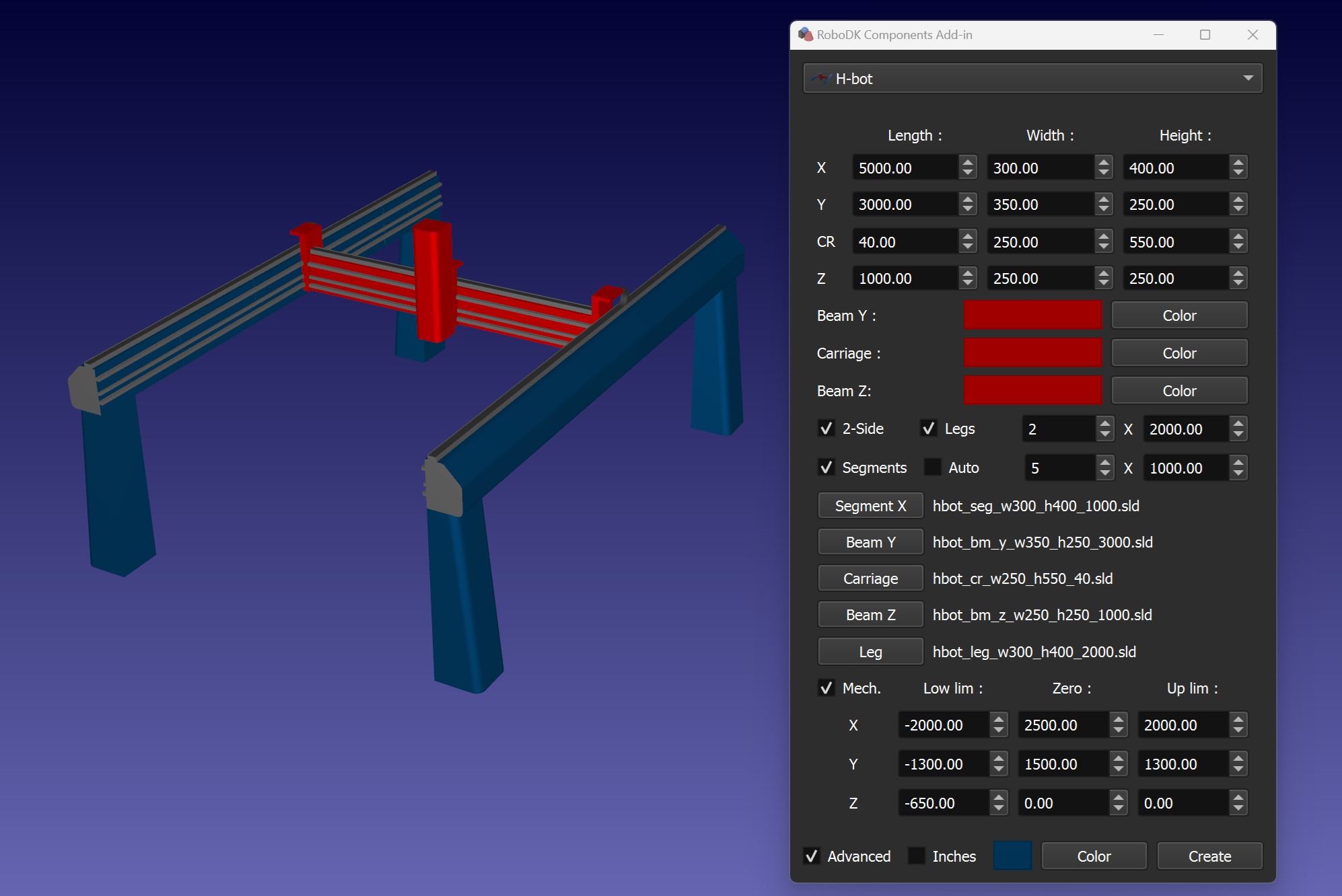
H-bot
Vous pouvez créer un robot H paramétrique en définissant des paramètres pour les poutres X, Y, le chariot et la poutre Z.
Astuce : vous pouvez créer un robot H avec une poutre X segmentée en utilisant les modèles Segment, Beam Y, Beam Z et Carriage. Il est nécessaire de définir les fichiers de modèle appropriés à l'aide des boutons Segment X, Poutre Y, Chariot et Poutre Z. Veillez à utiliser les valeurs de dimensions et le nombre de segments corrects. Utilisez la case à cocher Segments pour construire le modèle de robot H approprié.
Astuce : utilisez la case à cocher Mécanisme pour créer un mécanisme de robot H. Vous pouvez également définir les limites de mouvement et la position zéro des axes à l'aide des paramètres correspondants.
Note : Veuillez vérifier le déplacement des modèles de segments, de poutres et de chariots dans le cas où l'option Segments est utilisée. Le dossier Models contient plusieurs exemples. Par défaut, le dossier contenant les exemples de modèles est C:\NRoboDK Add-in\Ncom.robodk.app.shape\NComponents\Nmodelshbot\N.
Astuce : utilisez la case à cocher Auto pour définir les paramètres en fonction des mesures du système de coordonnées de délimitation du modèle. De petits détails du modèle peuvent affecter le résultat de la mesure. Vous pouvez décocher la case Auto après la mesure et définir les paramètres manuellement.
Astuce : utilisez la case à cocher Jambes pour ajouter le nombre requis de colonnes de base de la hauteur spécifiée.
Astuce : utilisez la case à cocher 2 côtés pour ajouter une poutre en X réfléchie.
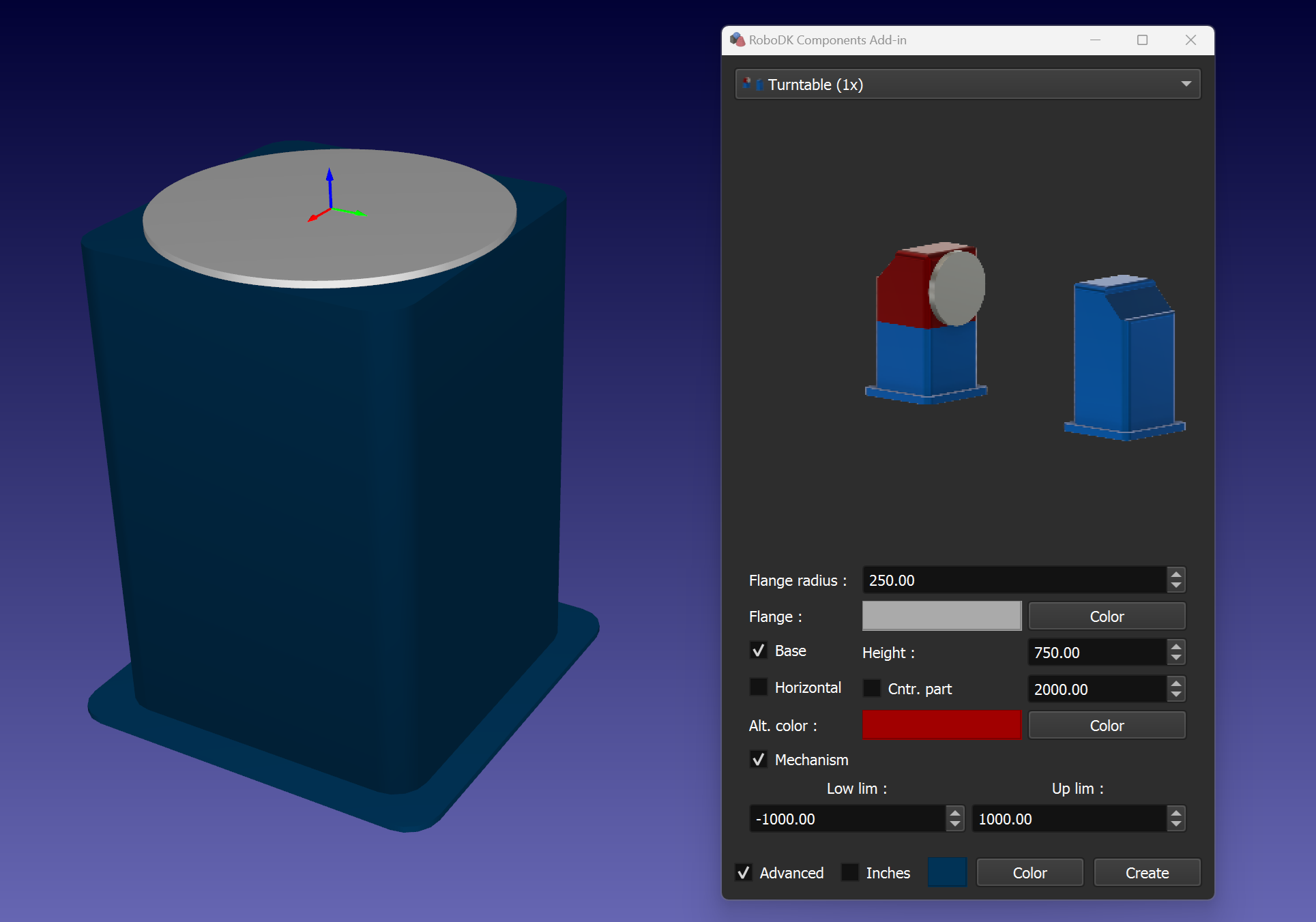
Table tournante (1x)
Vous pouvez créer un plateau tournant en spécifiant des paramètres tels que le rayon de la bride, la hauteur de la base et les couleurs de la base et de la bride.
Astuce : utilisez la case à cocher Base et le paramètre de hauteur pour créer le corps du positionneur.
Astuce : vous pouvez créer un positionneur horizontal ou vertical en cochant la case Horizontal. En outre, vous pouvez utiliser la case Cntr. part et le paramètre de décalage correspondant si une contre-pièce est nécessaire.
Astuce : utilisez la case à cocher Mécanisme pour créer un mécanisme de plateau tournant. Vous pouvez également définir les limites du mouvement à l'aide des paramètres correspondants.
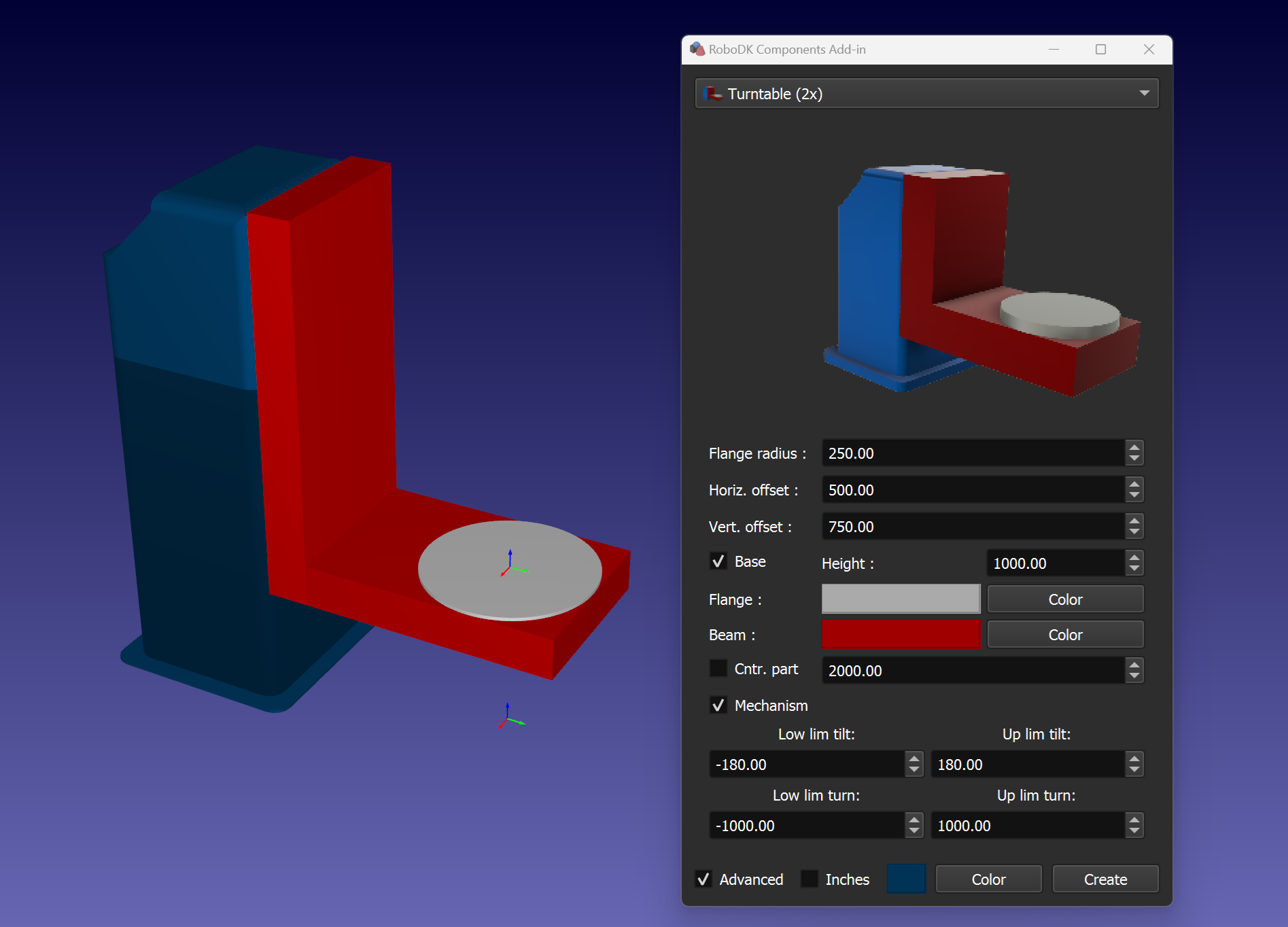
Table tournante (2x)
Vous pouvez créer un plateau tournant incliné en spécifiant des paramètres tels que le rayon de l'aile, les décalages verticaux et horizontaux, la hauteur de la base et les couleurs de la base, de la poutre et de l'aile.
Astuce : utilisez la case à cocher Base et le paramètre de hauteur pour créer le socle du positionneur.
Astuce : vous pouvez utiliser la case à cocher Partie Cntr. et le paramètre de décalage correspondant si une contre-pièce est nécessaire.
Astuce : utilisez la case à cocher Mécanisme pour créer un mécanisme de plateau tournant inclinable. Vous pouvez également définir les limites du mouvement à l'aide des paramètres correspondants.
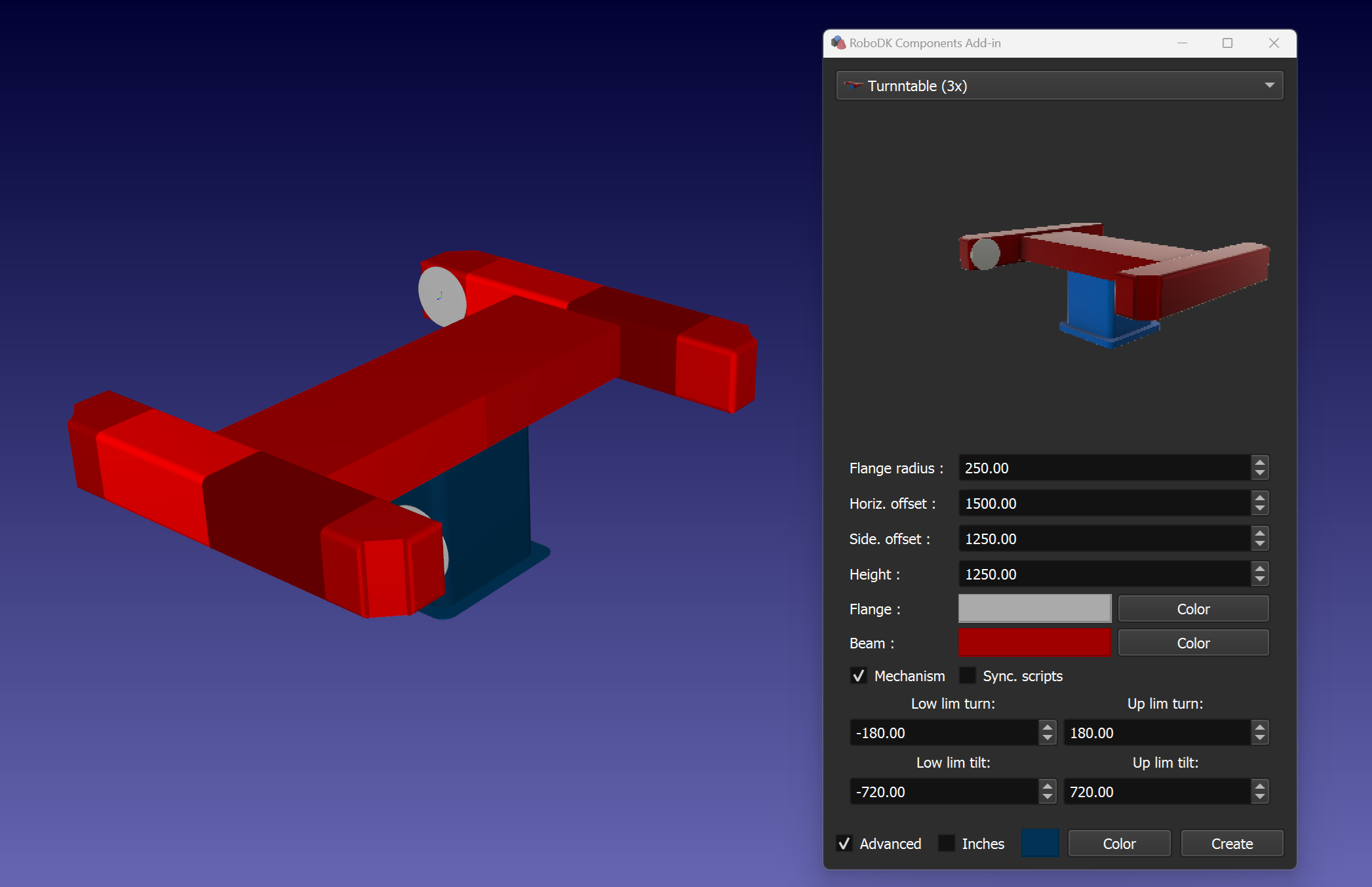
Table tournante (3x)
Vous pouvez créer un positionneur à 3 axes en spécifiant des paramètres tels que le rayon de la bride, les décalages latéraux et horizontaux, la hauteur et les couleurs de la base, de la poutre et des brides.
Astuce : utilisez la case à cocher Mécanisme pour créer un mécanisme de positionneur à 3 axes. Vous pouvez également définir les limites du mouvement à l'aide des paramètres correspondants.
Astuce : Utilisez la case à cocher Scripts de synchronisation pour créer des scripts Python supplémentaires qui synchroniseront le robot avec l'axe horizontal requis en exécutant le script correspondant.
Note : Par défaut, C:\RoboDK\Addins\com.robodk.app.shape\Components\scripts\ est le dossier qui contient les exemples de scripts de synchronisation.
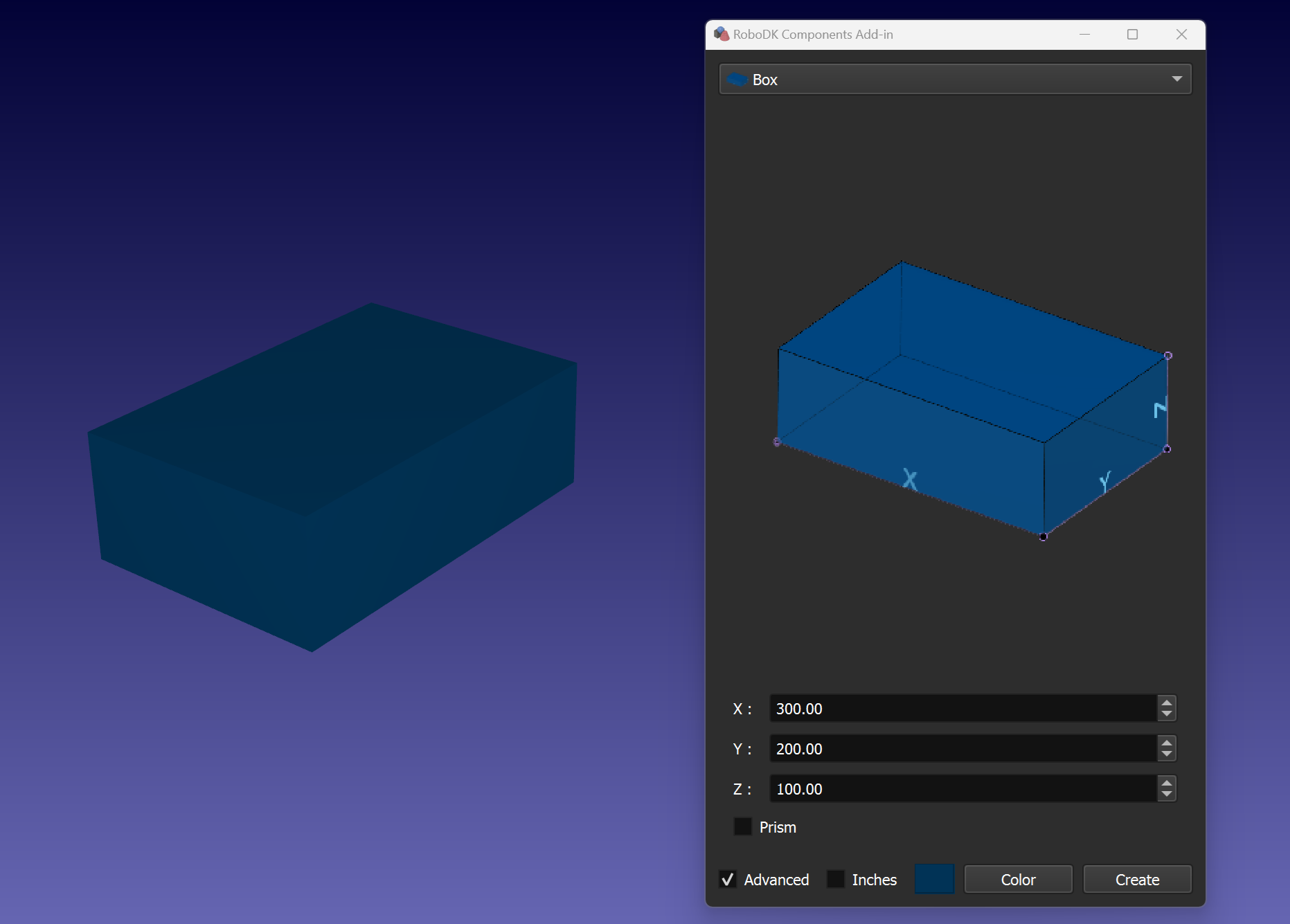
Boîte
Vous pouvez créer une boîte en spécifiant les dimensions (X, Y, Z).
Astuce : utilisez la case à cocher Prisme pour créer un prisme.
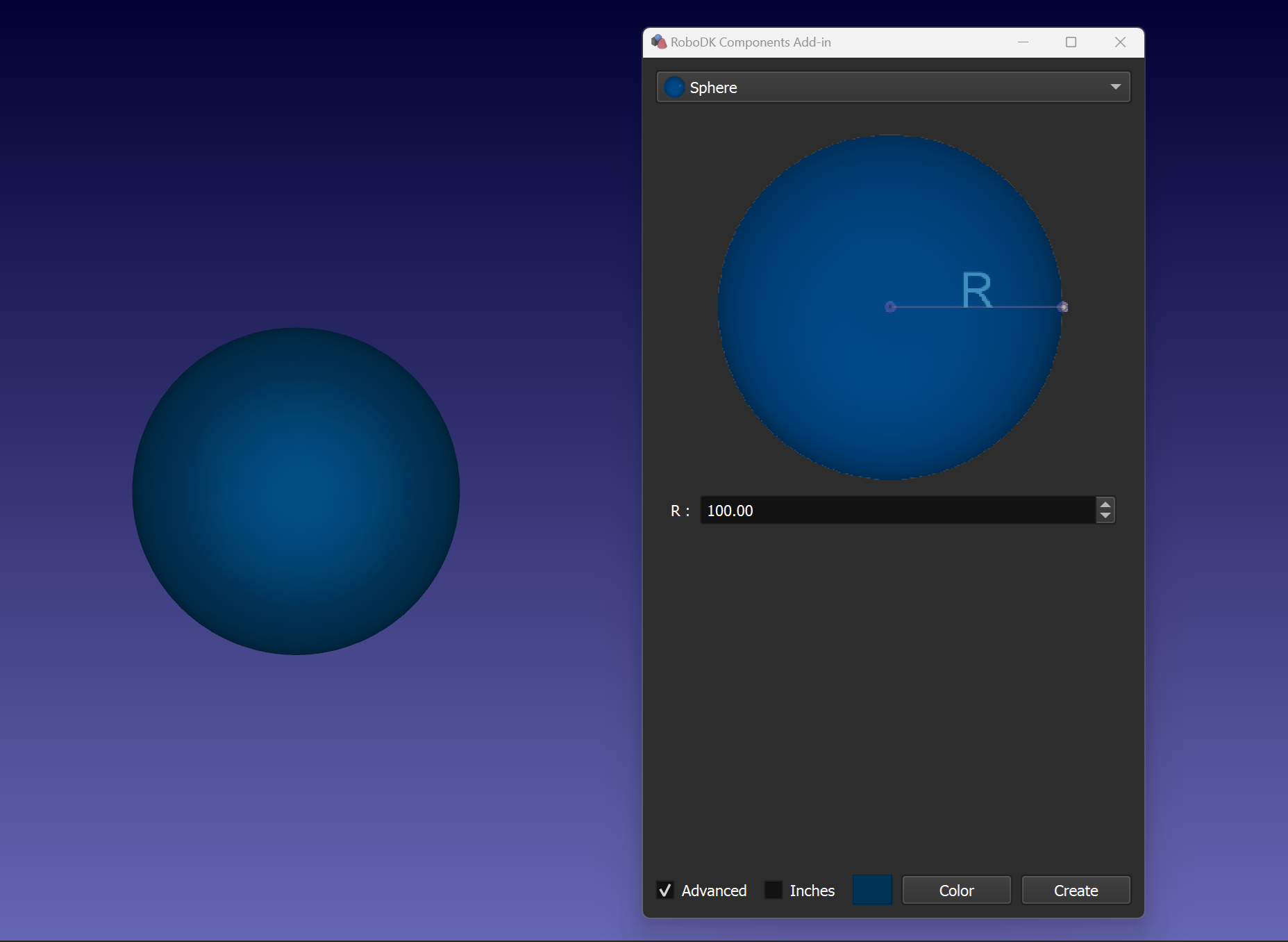
Sphère
Vous pouvez créer une sphère en spécifiant le rayon (R).
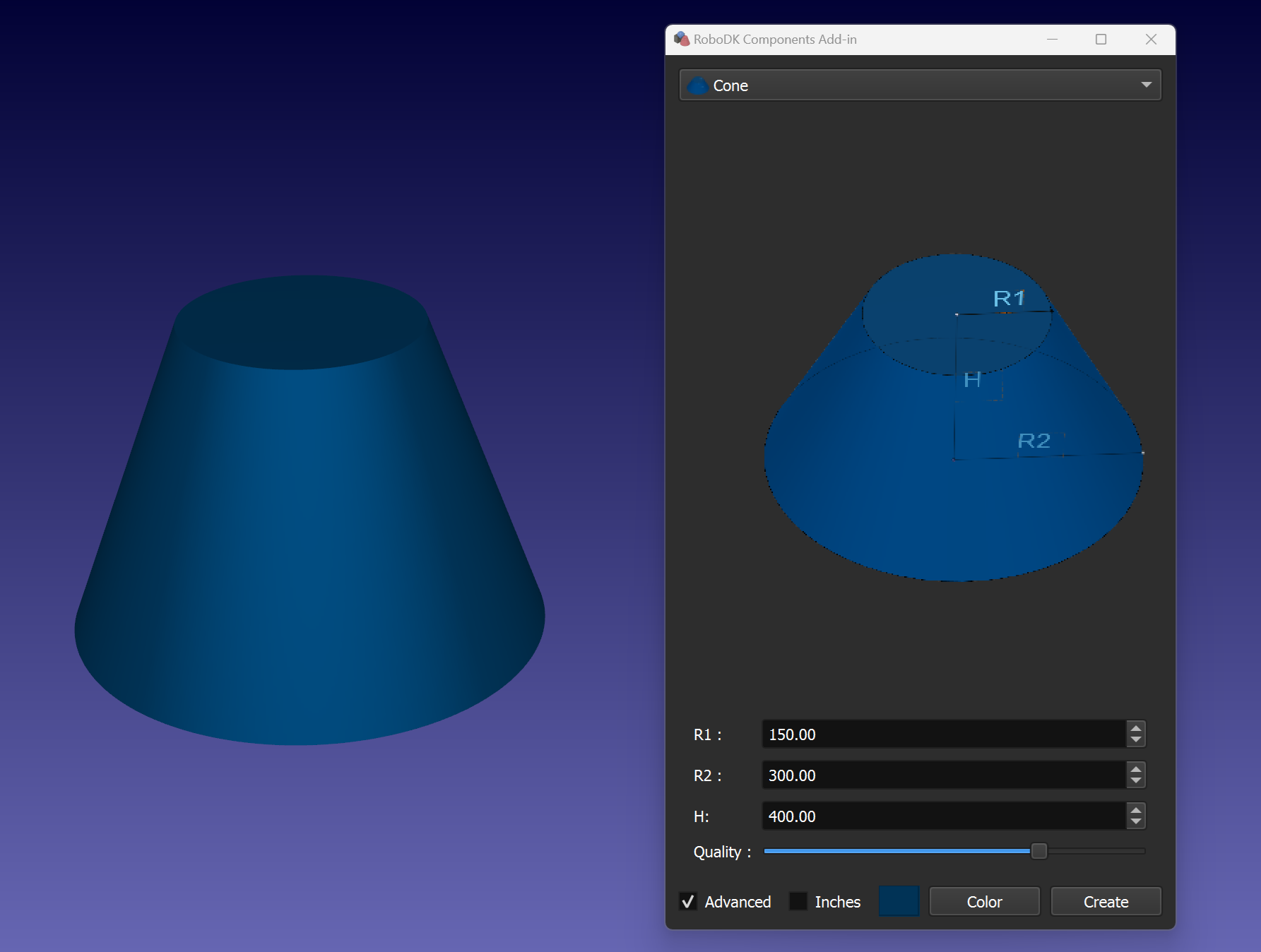
Cône
Vous pouvez créer un cône en spécifiant les dimensions (R1, R2, H) et les paramètres de qualité.
Astuce : si R1 est égal à R2, un cylindre sera créé.