Importer le marqueur
Vous devez importer le marqueur dans RoboDK pour indiquer l'emplacement du marqueur par rapport au robot et aux autres objets.
Suivez les étapes suivantes pour placer correctement le marqueur :
1.Dans votre station RoboDK, créez un nouveau système de coordonnées.
2.Cliquez avec le bouton droit de la souris sur le nouveau système de coordonnées et sélectionnez "Add-in...".
3.Recherchez et sélectionnez le marqueur PNG créé avec le générateur de marqueurs fiduciaires.
4.Ajustez l'échelle du marqueur virtuel pour qu'il corresponde à la taille du marqueur réel :
Exemple : Le marqueur Charuco Diamond mesure 106,186 mm x 106,186 mm par défaut. Si la taille du marqueur imprimé est de 280 mm x 280 mm, un facteur d'échelle de 2,63688 → ( 280 / 106,186 ) doit être appliqué. Pour ce faire, double-cliquez sur l'objet marqueur et sélectionnez Plus d'options à Appliquer l'échelle.
5.Alignez le centre du marqueur sur l'origine du système de coordonnées, l'axe Y étant orienté vers l'ID supérieur.
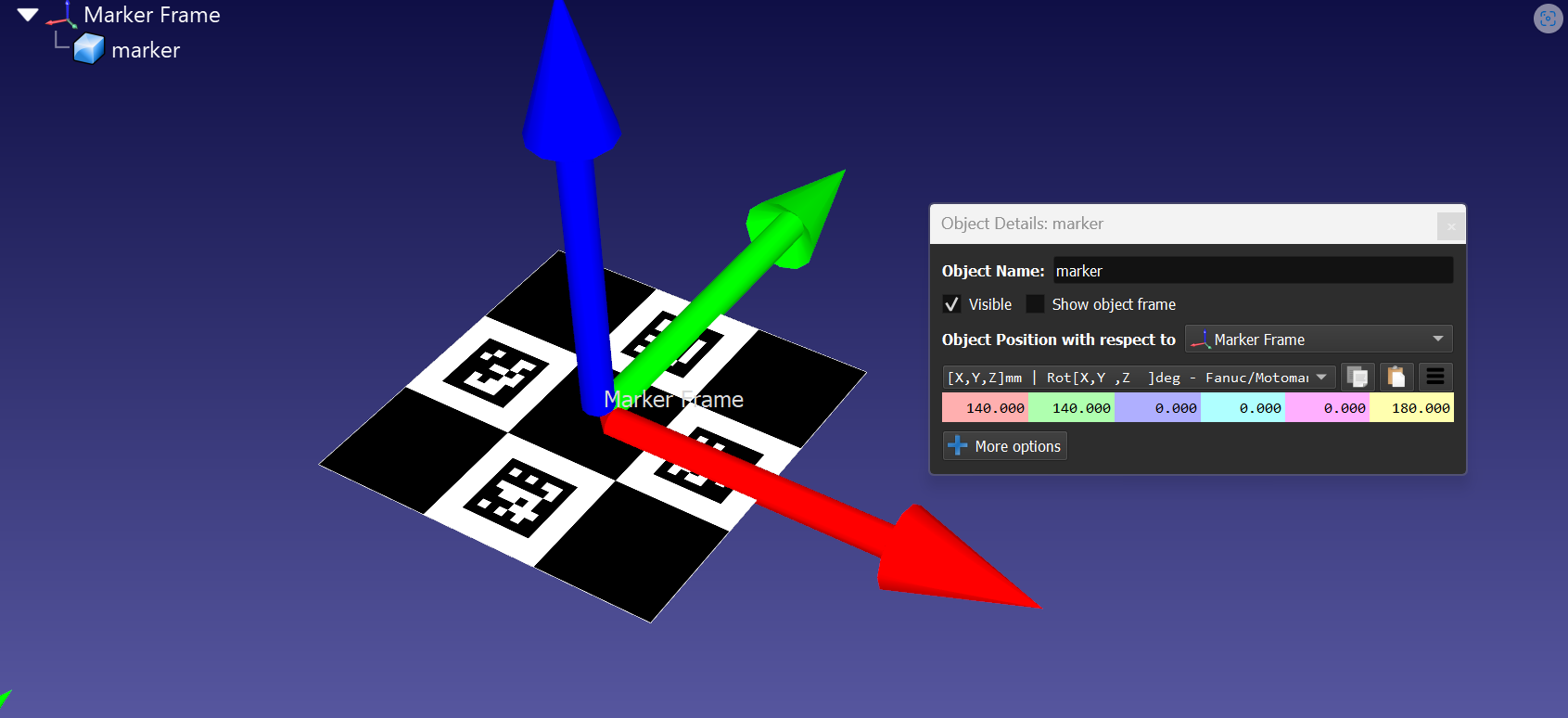
Exemple : Pour déplacer le marqueur, double-cliquez sur l'objet marqueur et modifiez la position de l'objet par rapport au système de coordonnées du marqueur. Dans notre exemple, le marqueur devait être déplacé de 140 mm sur l'axe X, de 140 mm sur l'axe Y et tourné de 180° sur l'axe Z. Voir l'image ci-dessous pour un exemple de la position correcte.
6.Placez le système de coordonnées du marqueur dans la station pour aligner les objets de la station par rapport au marqueur.