Repères
Un Repère (ou système de coordonnées) permet de définir l’emplacement d’un objet relatif à un autre en fournissant les coordonnées de position et d’orientation (6 degrés de liberté au total).
On considère comme objet un objet 3D, un robot ou un repère de référence.
Toutes les applications de programmation hors ligne nécessitent de définir et d’identifier des repères de référence pour localiser des objets les uns par rapport aux autres et aussi par rapport à un robot dans le cadre d’une simulation.
Faire glisser des repères dans l’arborescence de la station pour établir une relation (hiérarchie) spécifique, tel que montré dans l’image suivante.
Il est possible de définir l’emplacement d’un ou plusieurs repères, relatif au robot ou d’autres repères, en touchant 3 points. Ceci permet de positionner correctement les objets dans l’espace virtuel. La procédure peut être accomplie en utilisant un contrôleur robot (Teach Pendant) ou RoboDK. Plus d’information est disponible dans la section Calibrer Repère.
Avec RoboDK il est possible d’entrer manuellement les valeurs de translation et de rotation d’un repère, incluant différents ordres de rotation des angles d’Euler utilisés en robotique.
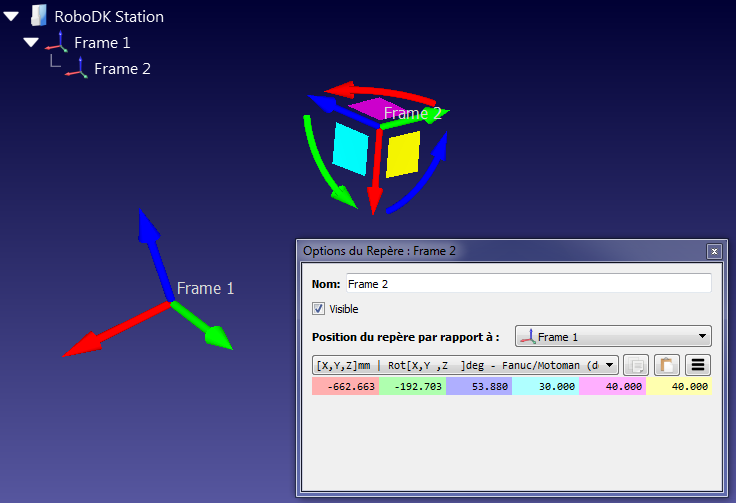
Par défaut, RoboDK affiche la relation sous la représentation de coordonnées XYZ et angles d’Euler en format X➔Y➔Z. Cela signifie que la rotation est effectuée par l’ordre suivant :
1.Une rotation est effectuée autour de l’axe X fixe (case bleue)
2.Une rotation est effectuée autour l’axe Y fixe (case rose)
3.Une rotation est effectuée autour l’axe Z fixe (case jaune).
Les contrôleurs Fanuc et Yaskawa/Motoman utilisent le format précédent, cependant les autres fabricants effectuent la rotation dans différents ordres.
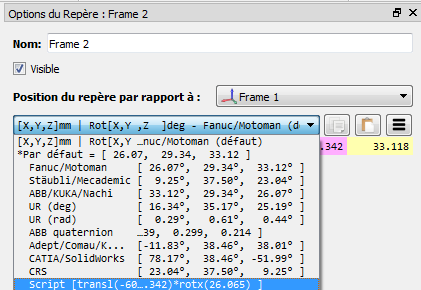
Il est possible de sélectionner parmi les différents formats d’orientation dans la liste de détails du repère (double cliquer sur le repère pour afficher la fenêtre d’options).
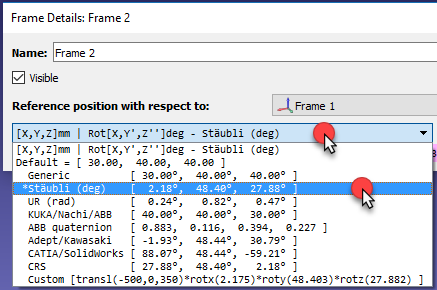
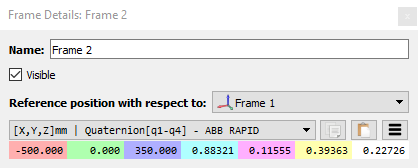
Par exemple, les robots Stäubli utilisent l’ordre X➔Y’➔Z’’ ou bien les robots KUKA et Nachi utilisent Z➔Y’➔X’’. Et pour les robots ABB, ils utilisent des valeurs quaternion, nécessitant 4 valeurs pour définir une rotation.
Il est aussi possible d’entrer manuellement un format personnalisé. Par exemple, la commande suivante est affichée si vous sélectionner l’option « Script ».