Projet FAO
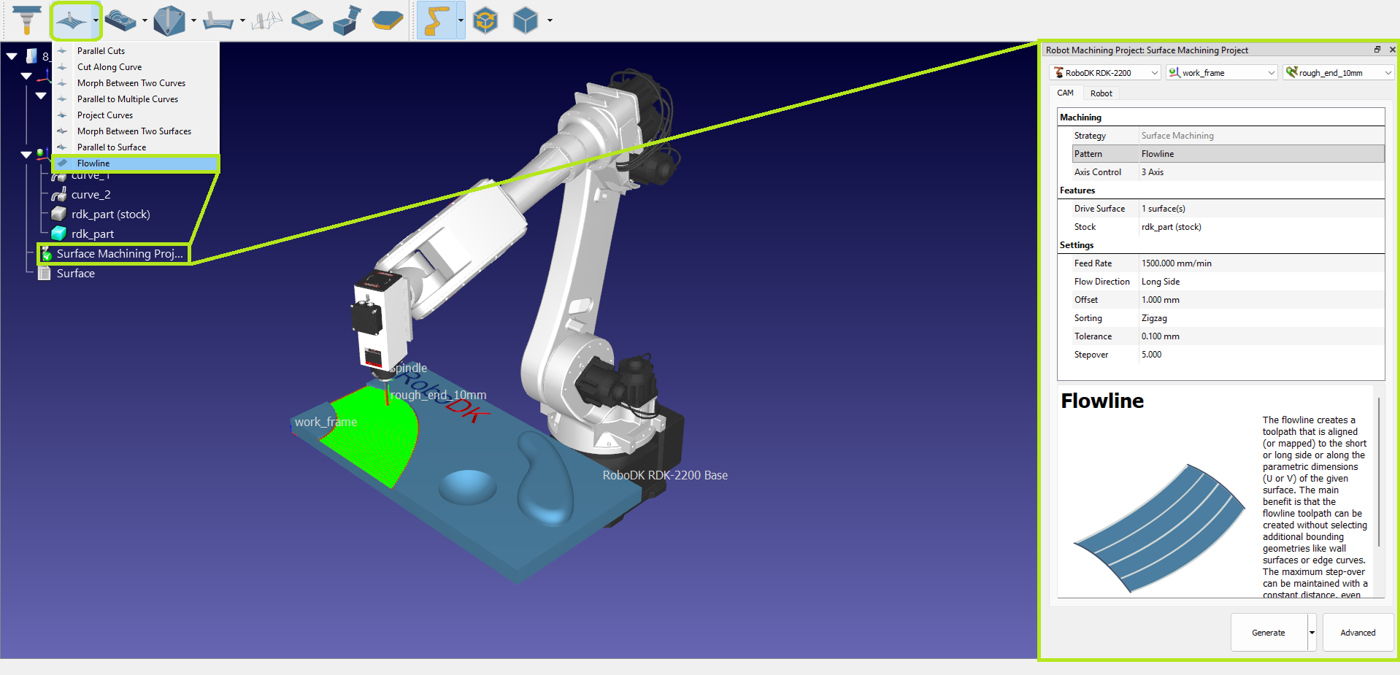
Dans la barre d'outils RoboDK CAM, vous pouvez sélectionner la stratégie d'usinage adaptée à votre tâche.

Après avoir sélectionné la stratégie requise, le projet FAO sera créé automatiquement.
Paramètres FAO
La fenêtre des paramètres du projet FAO se compose d'une section supérieure et des onglets FAO et Robot. Le robot, le repère et la fraise sont sélectionnés dans la section supérieure de la fenêtre. Par défaut, les éléments actifs au moment de la création du projet FAO sont sélectionnés.

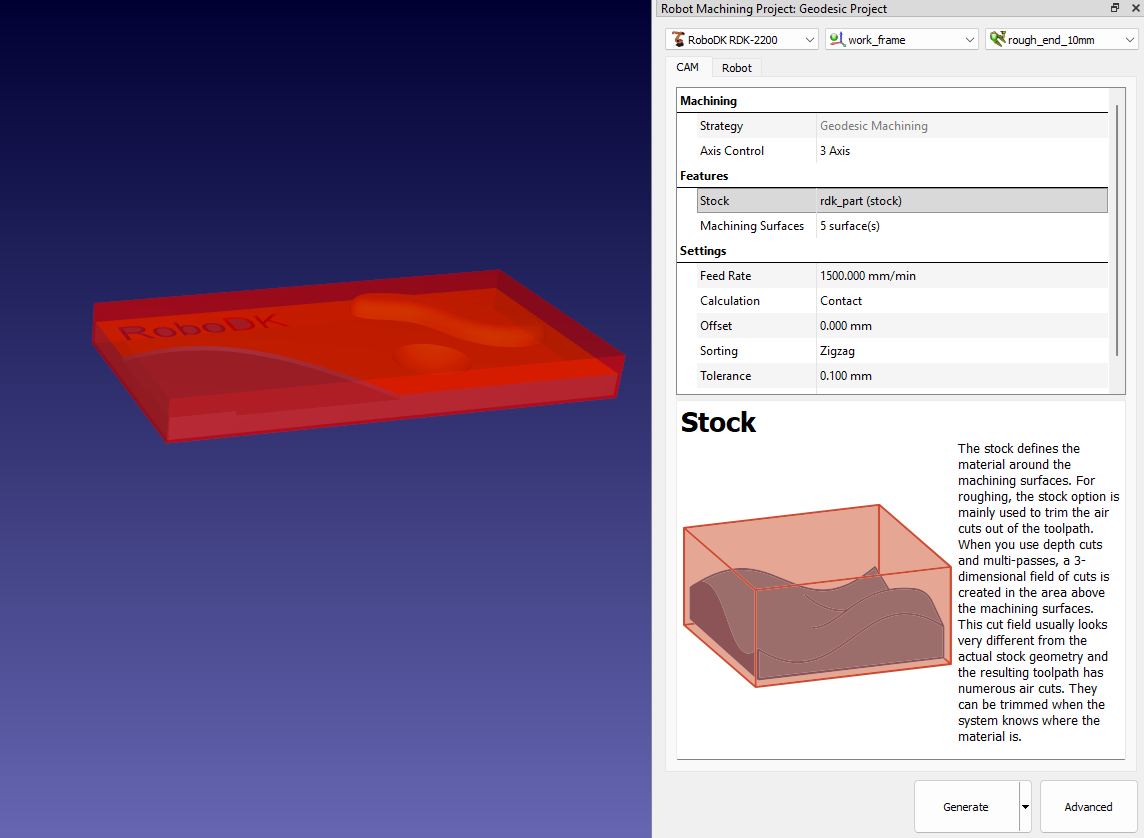
Onglet FAO
L'onglet FAO du menu du projet FAO contient les paramètres d'usinage et autres paramètres de stratégie décrits dans cette section.
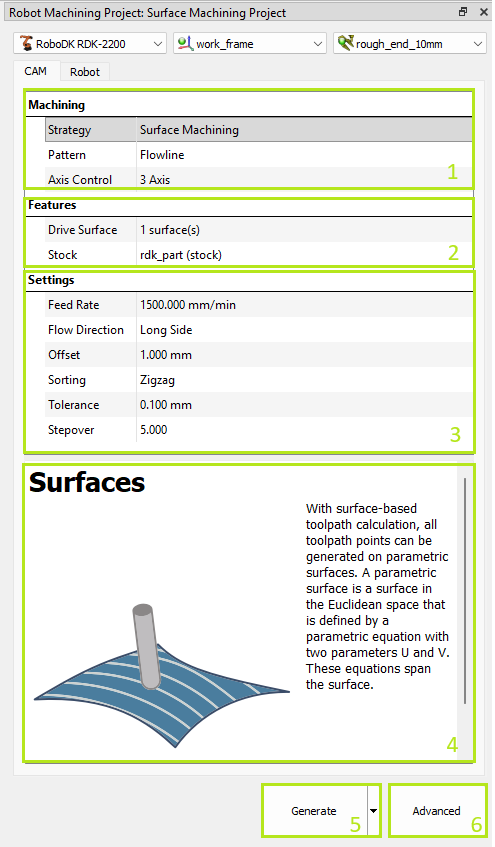

1.Paramètres d'usinage : indique le groupe de stratégies sélectionné et permet de basculer entre les modèles. De plus, vous pouvez sélectionner le mode de contrôle des axes.
2.Paramètres des caractéristiques – indique les caractéristiques sélectionnées de la pièce et du stock. Cette sélection est obligatoire pour calculer les trajectoires d'outil.
3.Paramètres spécifiques à la stratégie.
4.Astuce : apparaît lorsque vous cliquez sur les paramètres.
5.Bouton de génération de la trajectoire d'outil – calcule la trajectoire d'outil et l'applique au robot sélectionné. Les sous-options Valider et Appliquer au robot vous permettent de séparer les actions de calcul et d'application pour les trajectoires d'outil complexes.
6.Paramètres avancés de la stratégie.
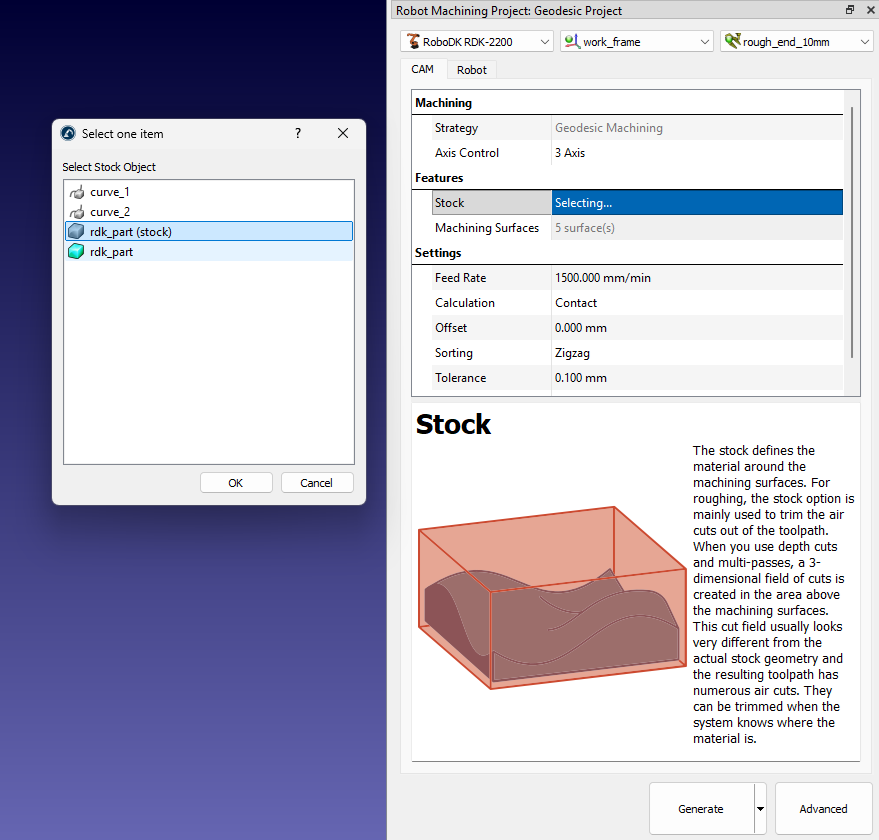
Sélection des caractéristiques
Dans la section Caractéristiques, vous pouvez sélectionner les caractéristiques géométriques requises pour la stratégie. En fonction de la stratégie, vous devez sélectionner des surfaces, des courbes ou des points. L'outil de sélection est lancé en double-cliquant sur la ligne de configuration des caractéristiques.
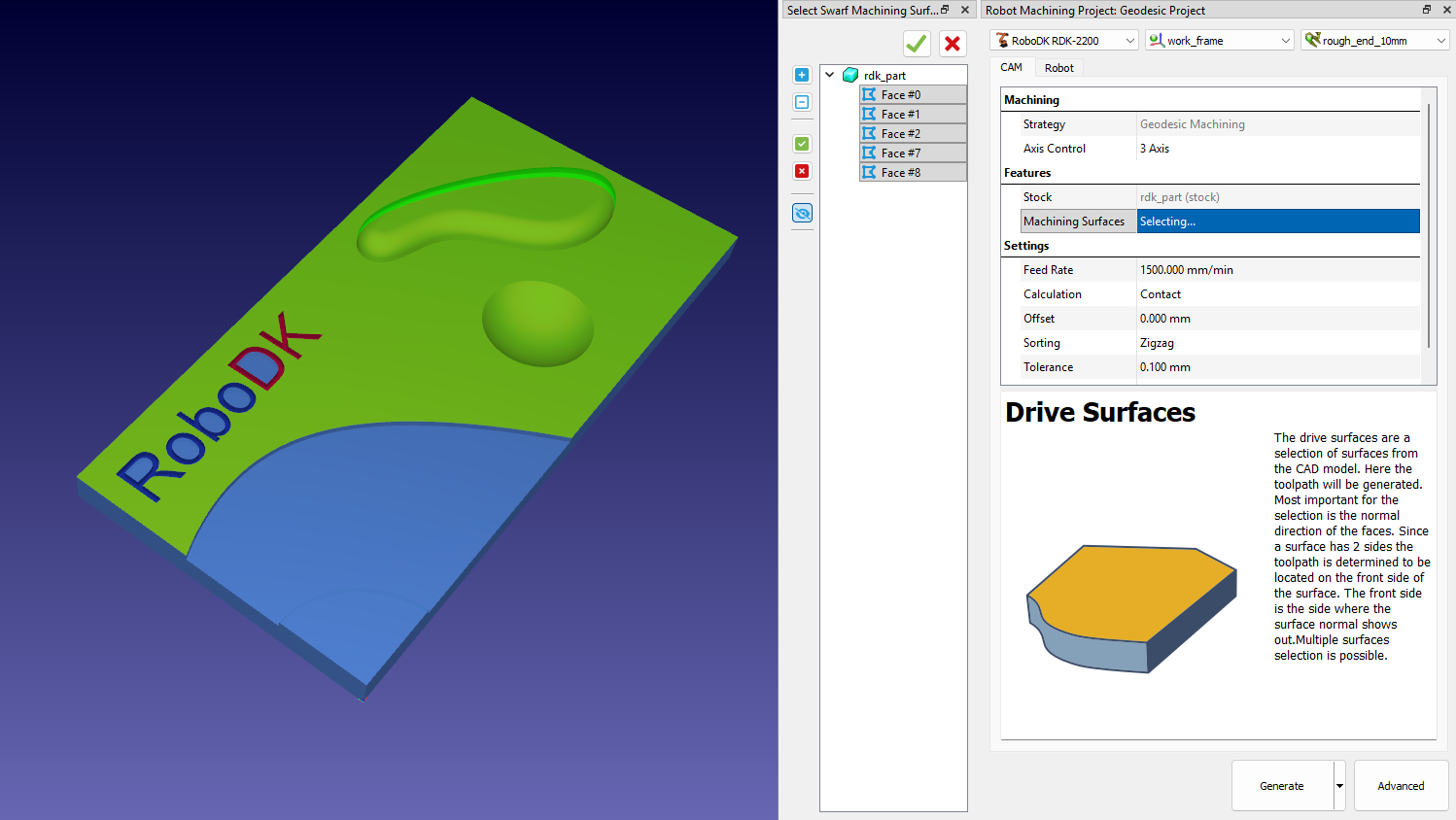

1.Appliquer la sélection / Fermer le sélecteur
2.Afficher les éléments de l'arborescence
3.Tout sélectionner dans les arborescences développées / Effacer la sélection
4.Afficher / Masquer toutes les caractéristiques
5.Arborescence des caractéristiques
Vous pouvez vérifier les caractéristiques géométriques sélectionnées en cliquant sur la ligne du sélecteur.
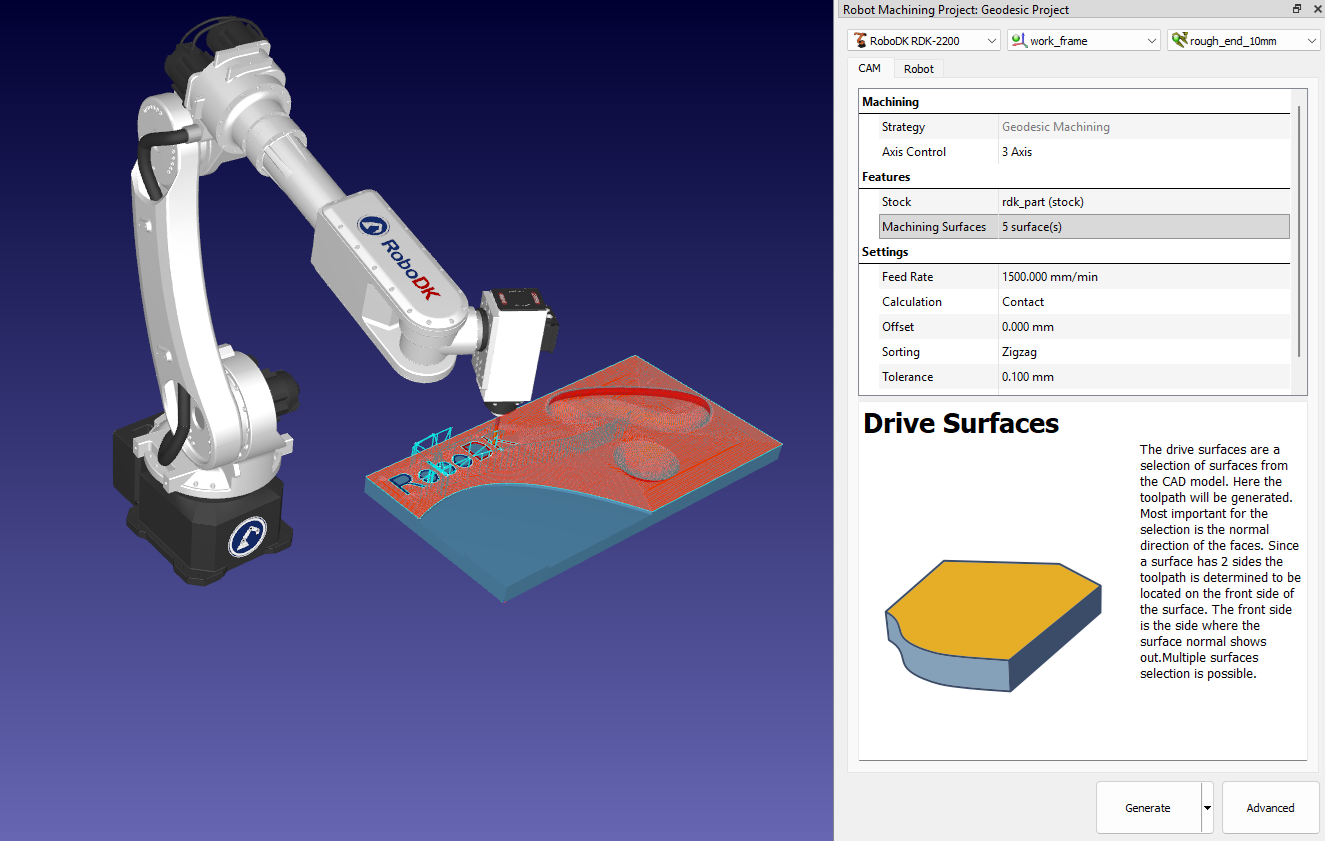
Vous pouvez également spécifier le modèle qui sera utilisé comme brut.
Onglet Robot
L'onglet Robot du menu du projet FAO contient les paramètres relatifs au mouvement du robot.
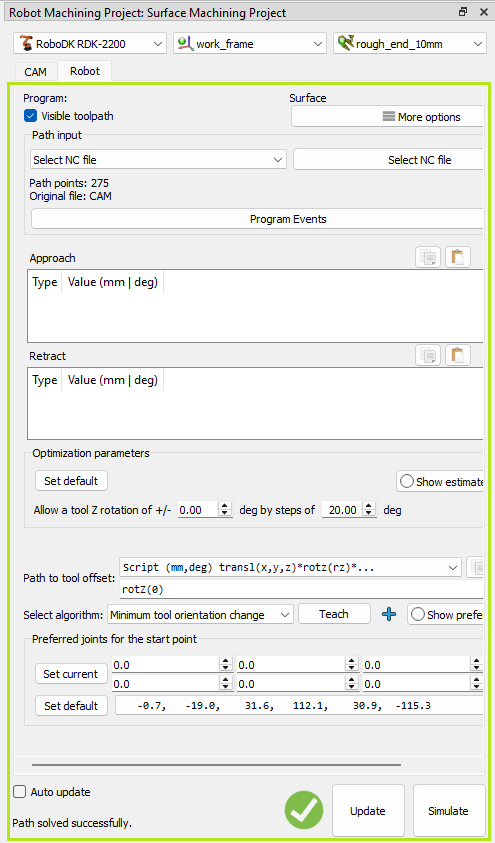
Ces paramètres sont les mêmes que ceux que vous pouvez trouver dans les paramètres du Projet d'usinage robotisé de RoboDK.