Reliez le robot
Utilisez la flèche vers le bas du bouton Lier le robot pour afficher un menu des robots disponibles et relier la simulation à l'un d'entre eux. Si le bouton est sélectionné (le robot est lié), appuyez dessus pour déconnecter le robot de la simulation.
La liaison entre le robot et la simulation peut également être effectuée à l'aide du menu contextuel dans l'arborescence de la station.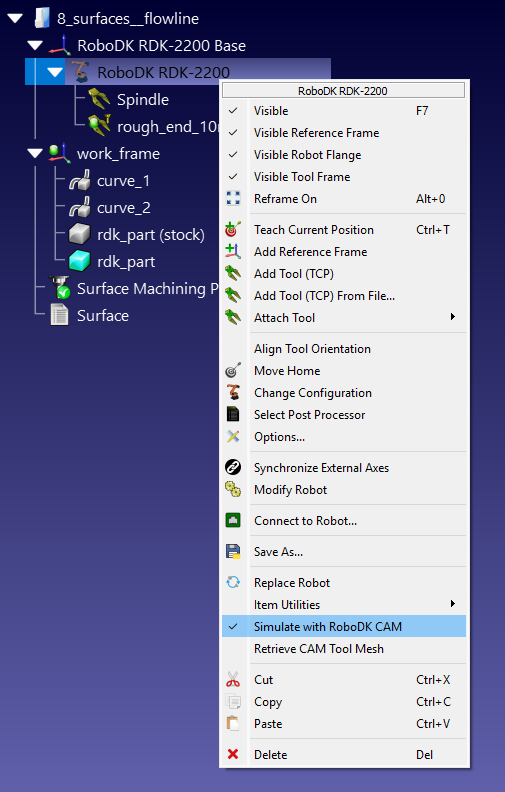
Une fois le robot lié à la simulation, tous les mouvements du robot dans la fenêtre RoboDK seront répétés par le simulateur sous forme de mouvements d'outils. Quelle que soit la source de ce mouvement : un programme RoboDK, un script Python ou un mouvement manuel avec une souris.
Note : la commande de liaison du robot est également disponible dans le menu FAO Robot.