Simulation d'enlèvement de matière
La simulation d'enlèvement de matière est une visualisation dynamique étape par étape du processus d'enlèvement de matière. Elle fournit une simulation détaillée de la façon dont un outil effectue la découpe d'une pièce ou d'un matériau brut, vous permettant d'observer chaque étape du processus d'usinage.
Veuillez suivre ces étapes pour simuler correctement l'enlèvement de matière avec RoboDK CAM :
1.La fraise doit être définie.
2.Reliez le robot ou la CNC s'il y a plusieurs bras robotisés dans la station.
3.Veuillez spécifier l'objet brut.
4.Activez la simulation de découpe. Sinon, la simulation s'exécutera sans enlèvement de matière.
Reliez le robot
Utilisez la flèche vers le bas du bouton Lier le robot pour afficher un menu des robots disponibles et relier la simulation à l'un d'entre eux. Si le bouton est sélectionné (le robot est lié), appuyez dessus pour déconnecter le robot de la simulation.
La liaison entre le robot et la simulation peut également être effectuée à l'aide du menu contextuel dans l'arborescence de la station.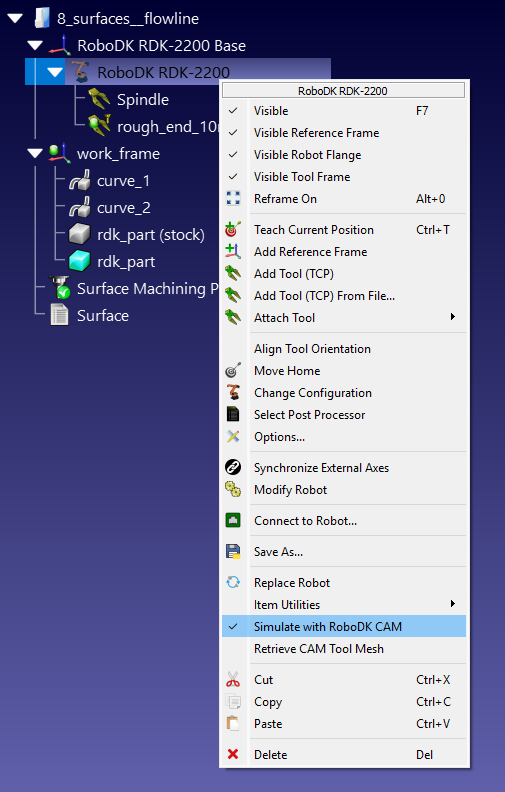
Une fois le robot lié à la simulation, tous les mouvements du robot dans la fenêtre RoboDK seront répétés par le simulateur sous forme de mouvements d'outils. Quelle que soit la source de ce mouvement : un programme RoboDK, un script Python ou un mouvement manuel avec une souris.
Définition de l'objet stock
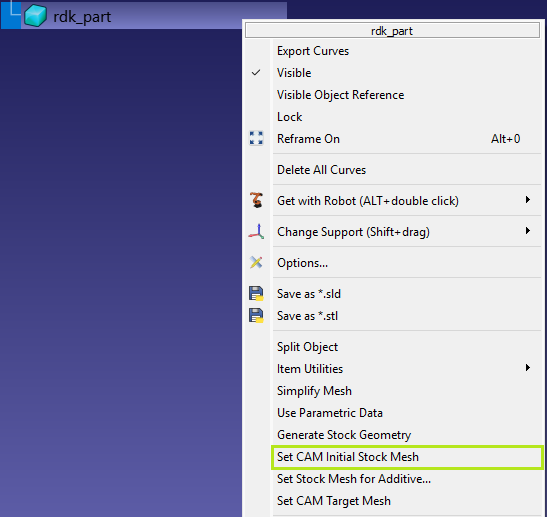
Cliquez avec le bouton droit de la souris sur l'objet stock dans l'arborescence RoboDK et sélectionnez Définir le maillage initial FAO.
Génération de l'objet brut
Cliquez avec le bouton droit sur l'objet brut dans l'arborescence RoboDK et sélectionnez Générer la géométrie du stock.
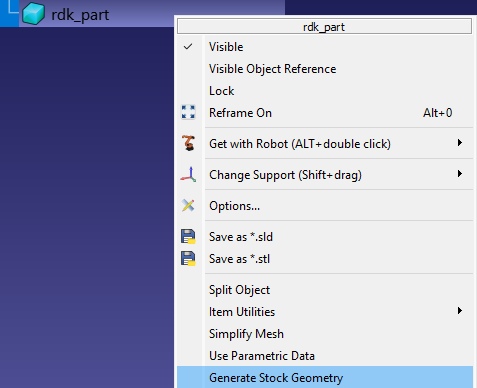
Cette commande lancera l'utilitaire de création de stock, qui utilise la forme du modèle d'origine pour le processus de génération.
Il existe trois méthodes pour générer des stocks :
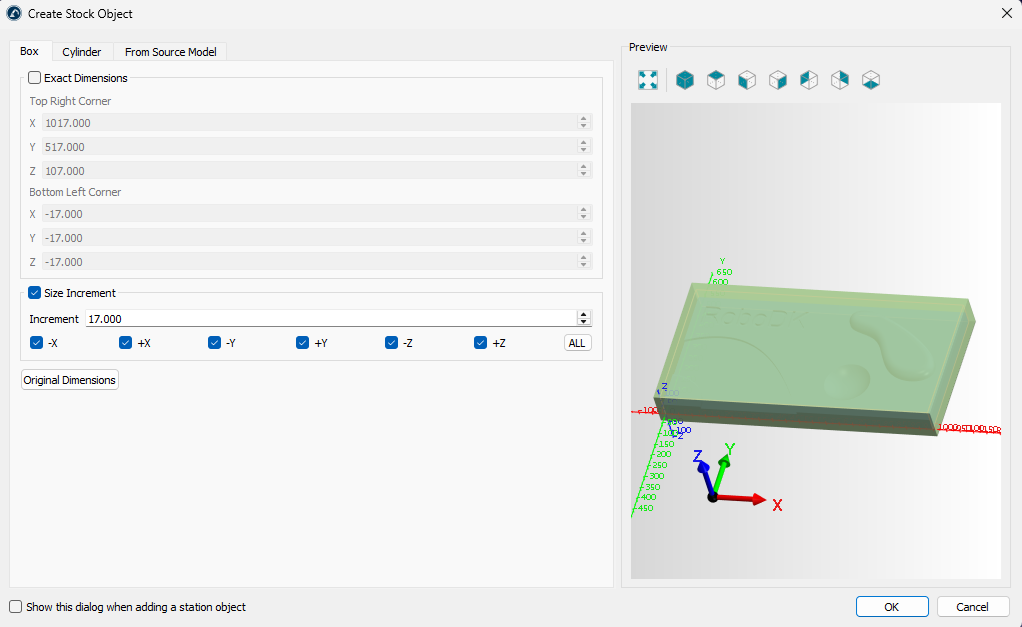
1.Boîte englobante – Onglet Boîte
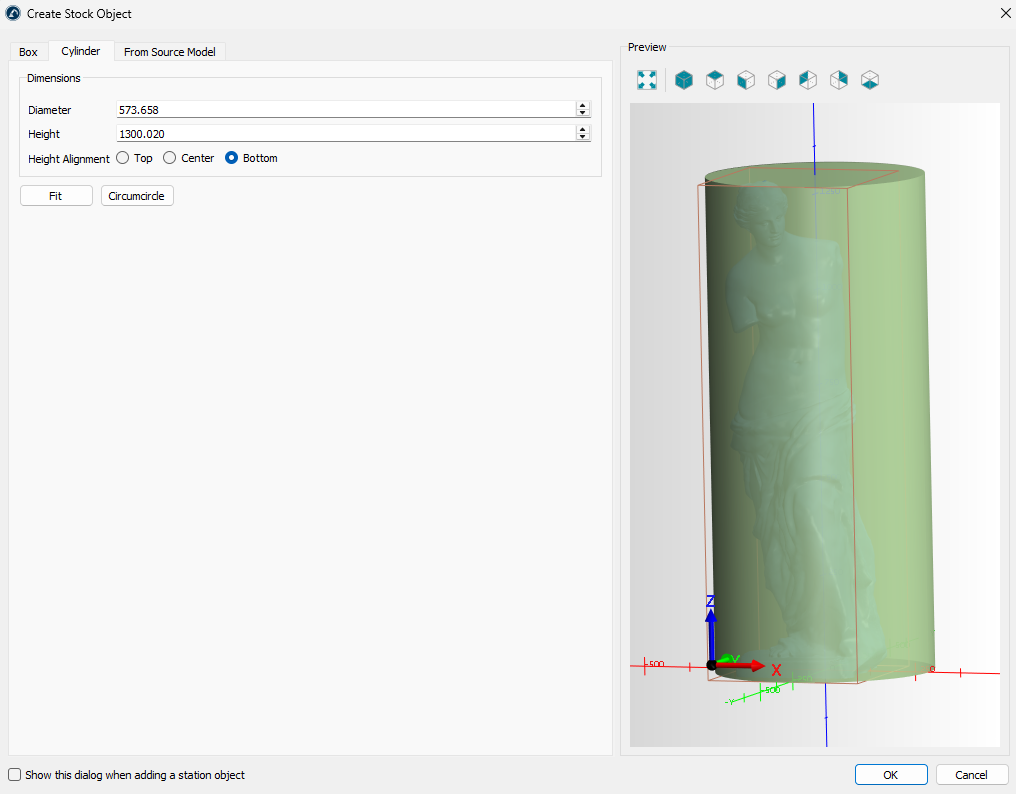
2.Cylindre englobant – Onglet Cylindre
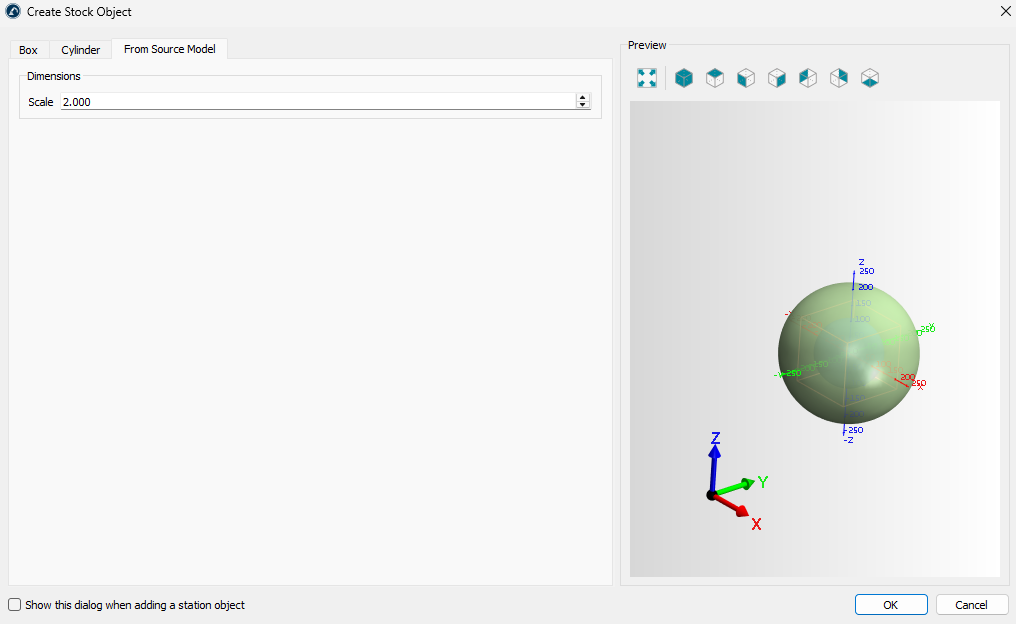
3.Mise à l'échelle – Onglet À partir du modèle source
Dans l'onglet Boîte, vous pouvez spécifier les dimensions exactes de la boîte englobante ou la générer en extrayant (à l'aide du bouton Dimensions d'origine) et en agrandissant des dimensions spécifiques.
L'onglet Cylindre vous permet de créer un stock sous la forme d'un cylindre contenant le modèle d'origine.
L'onglet À partir du modèle source vous permet de créer un stock sous la forme d'un modèle original mis à l'échelle.
Vue du stock
Une fois la définition du stock terminée, le modèle de stock de simulation s'affiche au-dessus des autres modèles dans la scène RoboDK. Vous pouvez contrôler l'affichage de la simulation du stock à l'aide du sous-menu Stock View de la barre d'outils :
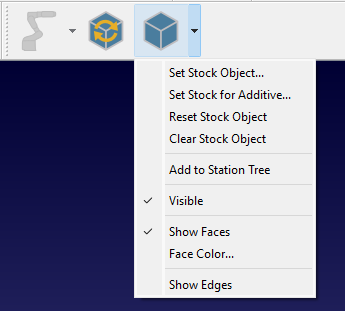
Définir l'objet stock – définissez/redéfinissez un objet stock.
Définir le stock pour l'objet additif – définir/redéfinir un objet de stock additif.
Réinitialiser l'objet de stock – rétablir le stock à son état initial.
Effacer l'objet stock – supprimer un objet stock.
Ajouter à l'arborescence de la station – copier le stock dans son état actuel en tant que modèle dans l'arborescence de la station RoboDK.
Visible – commutateur de visibilité du stock brut.
Afficher les faces – afficher les faces brutes.
Couleur des faces... – Définit la couleur par défaut des faces.
Afficher les arêtes – affichez les arêtes du brut.
Activer la simulation d'enlèvement de matière
La simulation d'enlèvement de matière est activée automatiquement. Cependant, vous pouvez la contrôler manuellement à l'aide de la commande FAO-Activer la fraise/l'extrudeuse.
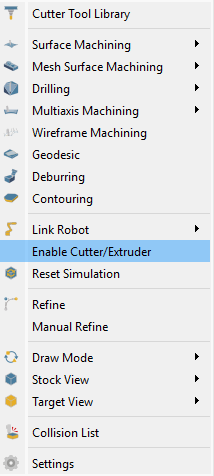
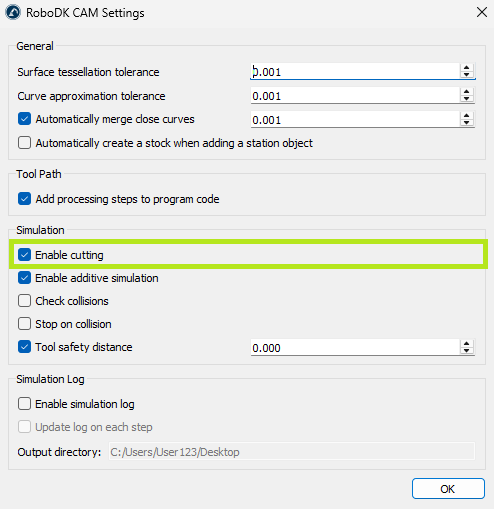
Il est également nécessaire de vérifier si le paramètre FAO-Settings-Simulation-Enable découpe est actif.
Réinitialiser la simulation
La commande de réinitialisation de la simulation rétablit le brut à son état initial.

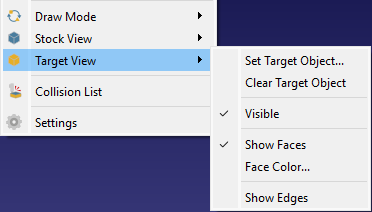
Vue cible
Vous pouvez comparer l'état actuel du stock avec le modèle cible. Pour ce faire, vous devez d'abord définir le modèle cible à l'aide de FAO-Vue cible-Définir l'objet cible, puis appliquer FAO-Mode de dessin-Carte de déviation.
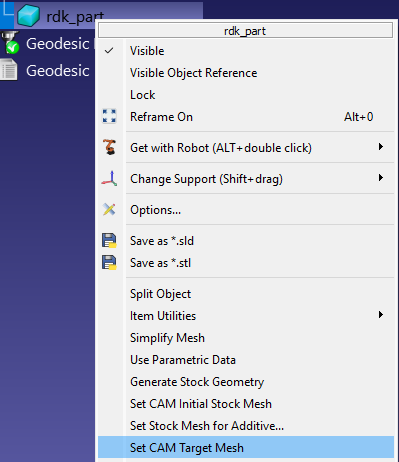
Pour définir l'objet cible, vous pouvez également cliquer avec le bouton droit de la souris sur le modèle dans l'arborescence de la station et sélectionner la commande Définir le maillage cible FAO.
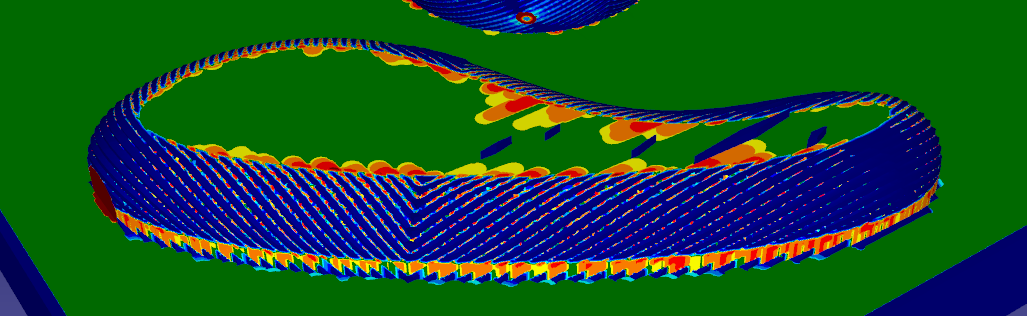
Carte de déviation
La carte de déviation affiche la différence relative à l'aide d'une échelle de couleurs allant du vert, qui indique aucune différence, au rouge, qui indique la plus grande différence.
Sélectionnez FAO-Draw Mode-Deviation Map pour afficher la carte de déviation.
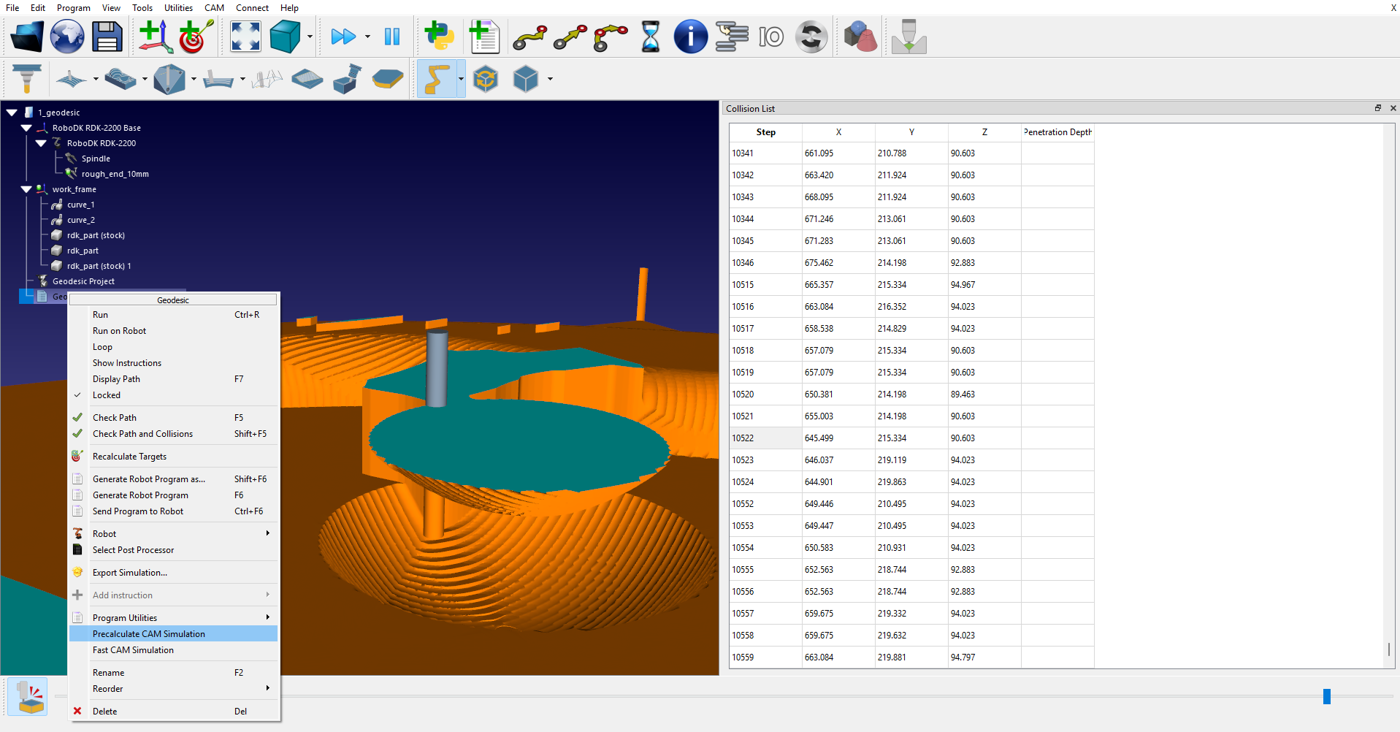
Liste des collisions
La liste des collisions affiche la séquence des collisions entre les parties non coupantes de l'outil de coupe (par exemple, le support) et la pièce à usiner pendant l'usinage.
Sélectionnez FAO-Liste des collisions pour afficher la liste des collisions.
Affiner/Affiner manuellement
Lorsque l'option Affiner est activée, vous pouvez obtenir une visualisation de surface de meilleure qualité pendant la simulation (cela peut affecter les performances de rendu).
À l'aide de la commande Manual Refine, vous pouvez améliorer la visualisation des surfaces une fois après avoir appuyé dessus.
Sélectionnez FAO-Affiner / FAO-Affiner manuellement pour effectuer l'opération d'affinage.
Simulation FAO rapide
Vous pouvez effectuer une simulation rapide de l'enlèvement de matière. Pour ce faire, cliquez avec le bouton droit de la souris sur le programme cible et sélectionnez la commande Simulation FAO rapide.