Ajouter des nouvelles cibles à la carte
Toute nouvelle cible peut être ajoutée à la carte PRM sans avoir à régénérer toute la carte. Cela signifie que la carte ne doit être complètement régénérée que si de nouveaux objets sont ajoutés à l’espace de travail ou si des objets existants sont déplacés.
Lorsqu’une nouvelle cible est ajoutée à la carte, l’algorithme PRM tente de la connecter à un certain nombre de points existants avec un ensemble de nouveaux bords. Il est possible de définir un nombre de bords par défaut différent pour les nouvelles cibles que le nombre choisi pour la construction initiale de la feuille de route.
Le nombre maximum de bords pour les nouvelles cibles peut être défini à l’aide du processus suivant :
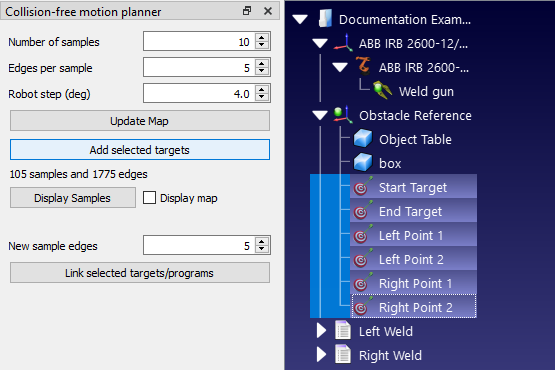
1.Ouvrir le panneau de planificateur de mouvement sans collision (Collision-free motion planner) en allant dans Utilitaires➔ Collision-free motion planner➔Créer une carte sans collision, ou cliqué sur la petite flèche de 
2.Entrer le nombre de bords dans Nouveaux échantillons de bords. Par défaut le nombre est 5.
Il y a 2 manières d’ajouter des nouvelles cibles à la carte :
1.Sélectionner les cibles dans l’arborescence. Plusieurs cibles adjacentes peuvent être sélectionnées à la fois en cliquant sur la cible la plus haute, en maintenant la touche Shift enfoncée, puis en cliquant sur la cible la plus basse. Plusieurs cibles non adjacentes peuvent être sélectionnées en maintenant la touche Ctrl enfoncée. Cliquer ensuite sur Ajouter les cibles sélectionnées dans le panneau Planification des mouvements sans collision.
2.Utiliser la même méthode de Lier les cibles sélectionnées ou Lier les programmes sélectionnés décrit dans la section précédente (lier des cibles, lier des programmes). Chaque cible qui n’est pas déjà présente dans la carte sera ajoutée automatiquement.