Astuces et meilleurs pratiques
Le planificateur de mouvement est simple d’utilisation, mais il y a des pratiques qui permettent de le rendre plus efficace.
Démarrer avec de petits paramètres
La phase de construction peut prendre beaucoup de temps. Cela peut devenir lourd au cours des premières étapes de la programmation lorsque la disposition de la cellule du robot change constamment. Chaque fois qu’un objet est ajouté à l’espace de travail ou déplacé, la feuille de route entière doit être recréée.
Pour réduire le temps passé à attendre que la feuille de route soit générée, il est bon d’utiliser d’abord des paramètres plus petits.
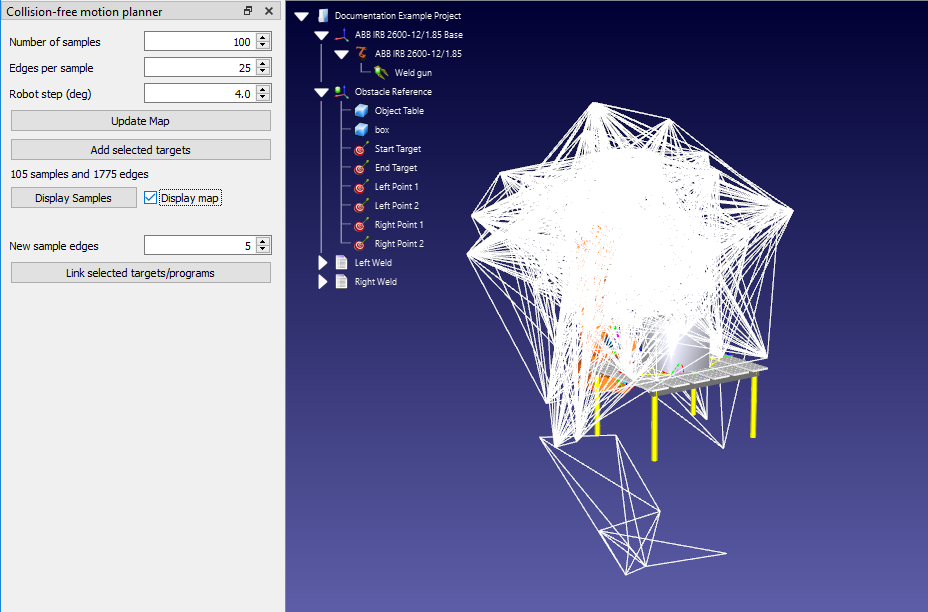
Par exemple, les paramètres suivants peuvent générer une carte en 10 à 15 secondes :
1.Nombre d’échantillons : 10
2.Bords par échantillon : 5
3.Etape Robot (deg) : 4.0
Cela ne produira pas les mouvements sans collision les plus efficaces, mais permettra de modifier la conception de la cellule beaucoup plus rapidement.
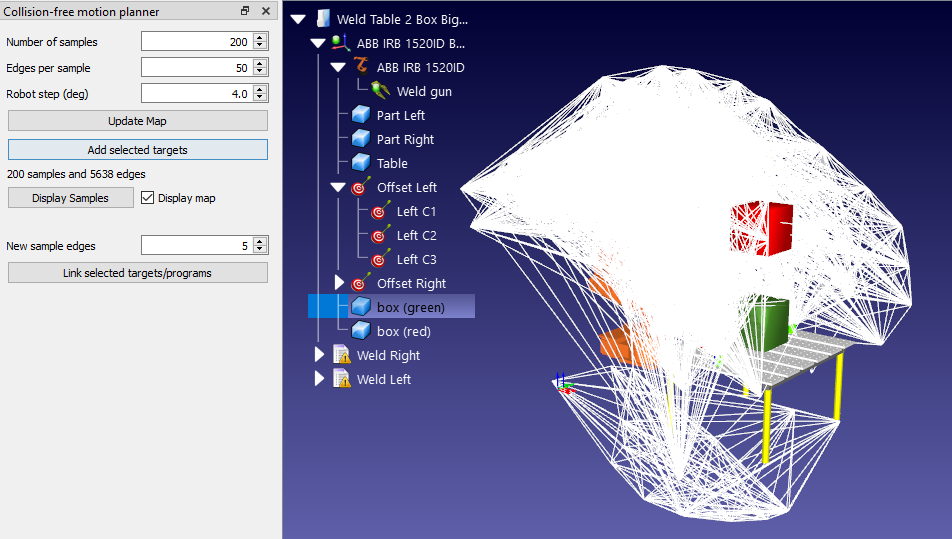
Lorsque l’emplacement de tous les objets dans la cellule a été décidé, alors une carte plus grande peut être générée (par ex. avec les paramètres par défaut de 100, 25, 4.0).
Enfin, avant de générer le programme robot, il peut être une bonne idée de générer une feuille de route encore plus grande (par ex. avec des paramètres de 500, 50, 2.0). Cela prendra beaucoup de temps, mais produira les mouvements les plus efficaces.
Utilisation des Limites de Joint
Le réglage des limites des articulations (joints) du robot (comme décrit dans la section précédente Contraindre les limites de joints) présente un double avantage. Premièrement, il peut accélérer la phase de construction dans certains cas. Deuxièmement, il s’assure que la carte contient effectivement des emplacements qui seront utiles pour le programme robot. Il est facile d’oublier cette étape vitale.
Définir correctement la carte de collisions
La détection de collision est déclenchée lorsque 2 objets entrent en collision. Vous pouvez spécifier la corrélation entre chaque objet en mouvement dans les paramètres de la Carte de collision. La réduction du nombre d’interactions (coches vertes) accélérera la vérification des collisions.
Vérification rapide de collision
Le temps nécessaire pour calculer les trajectoires sans collision dépend de nombreux facteurs décrits dans la section sur la détection des collisions.Vous pouvez augmenter l’étape du robot pour vérifier les collisions, limiter les limites des articulations ou simplifier la géométrie 3D pour accélérer la vérification des collisions.
Echelle des modèles 3D
Le terme « évitement des collisions » suggère que le planificateur de mouvement évitera toujours les collisions dans toutes les situations. C’est certainement vrai dans l’environnement de simulation. Cependant, dans le monde réel, le robot peut encore entrer en collision avec des objets s’il s’approche d’eux. Cela se produit généralement en raison de légères différences entre le robot simulé et le robot physique.
Ce genre de collisions peut avoir lieu lorsque qu’un robot pince le bord d’un objet, lorsqu’il bouge en dehors d’une tache. Cela peut être évité en appliquant un agrandissement d’échelle dans les programmes. AlleR sur le lien pour découvrir plus en détails l’utilisation d’un Offset.
Opérer dans la zone la plus agile du robot
Toutes les zones de l’espace de travail du robot ne sont pas égales. Le robot aura plus "d’accessibilité" dans certaines zones de son espace de travail que d’autres. Dans les zones à haute accessibilité, le robot sera en mesure d’accéder à des points à partir de nombreuses orientations. Dans les zones à faible accessibilité, le robot ne pourra accéder aux points qu’à partir d’une ou deux orientations.
Parfois, le planificateur de mouvement ne parvient pas à trouver un parcours entre deux cibles dans l’espace de travail. Souvent, ce problème peut être résolu simplement en augmentant le nombre d’échantillons dans la carte, mais pas toujours.
Si le planificateur de mouvement ne parvient pas continuellement à connecter les cibles, s’assurer que la tâche est située dans la zone de l’espace de travail du robot avec la plus grande accessibilité. Afficher l’espace de travail du robot en ouvrant le panneau/fenêtre du robot (faire un clic droit sur le robot dans l’arborescence de la station et choisir Options) et sélectionner Montrer pour outil actuel dans la section Espace de travail.