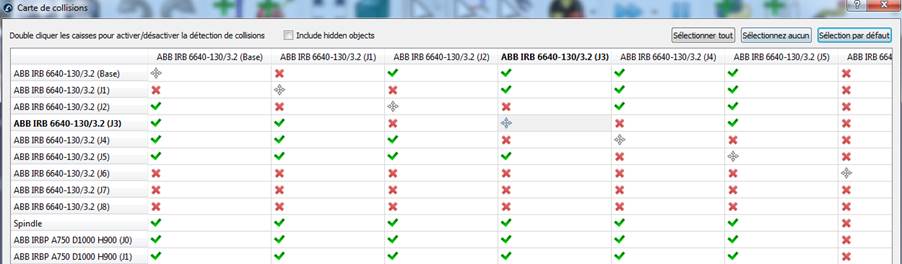
Il est possible de spécifier si l’interaction entre une paire d’objets est vérifiée pour les collisions en sélectionnant Outils➔ Carte de Collisions (Maj+X). Cela ouvre une nouvelle fenêtre affichant toutes les relations et l’état de vérification de collision. Double-cliquer sur une cellule pour activer ou désactiver la vérification de collision pour cette relation. Sélectionner Sélection par défaut pour configurer automatiquement une sélection conservatrice.
Par défaut, RoboDK vérifie les collisions entre tous les objets en mouvement dans la station, y compris tous les liens de robot, les objets et les outils. À titre d’exception, les articulations de robot consécutives ne sont pas vérifiées pour les collisions, car elles sont toujours en contact.
Astuce : Double-cliquer sur l’une des icônes de la diagonale pour vérifier/décocher les collisions d’un objet spécifique par rapport à tous les autres objets.
Astuce : Si la simulation ralentit en raison de la vérification des collisions, il peut être préférable de réduire le nombre de vérifications pour utiliser moins de puissance informatique pour la vérification des collisions.