Contraindre les limites de Joint
Il est inhabituel qu’une tâche utilise tout l’espace de travail du robot. Lors de la création d’une carte PRM, il est souvent une bonne idée de limiter les limites des articulations du robot. Cela accélérera le processus de génération de la carte et assurera que les points à l’intérieur de cette carte sont situés aux meilleurs endroits.
Pour un robot 6 axes, les 2 joints qui sont le plus souvent restreints sont :
1.Joint 1 (le joint de base) — Restreindre ce joint empêche le robot d’aller trop loin de chaque côté de l’espace de travail.
2.Joint 3 (le joint du coude) — Restreindre ce joint empêche le robot de changer de configuration avec coude haut et coude bas.
Changer les limites de joints en suivantes les étapes suivantes :
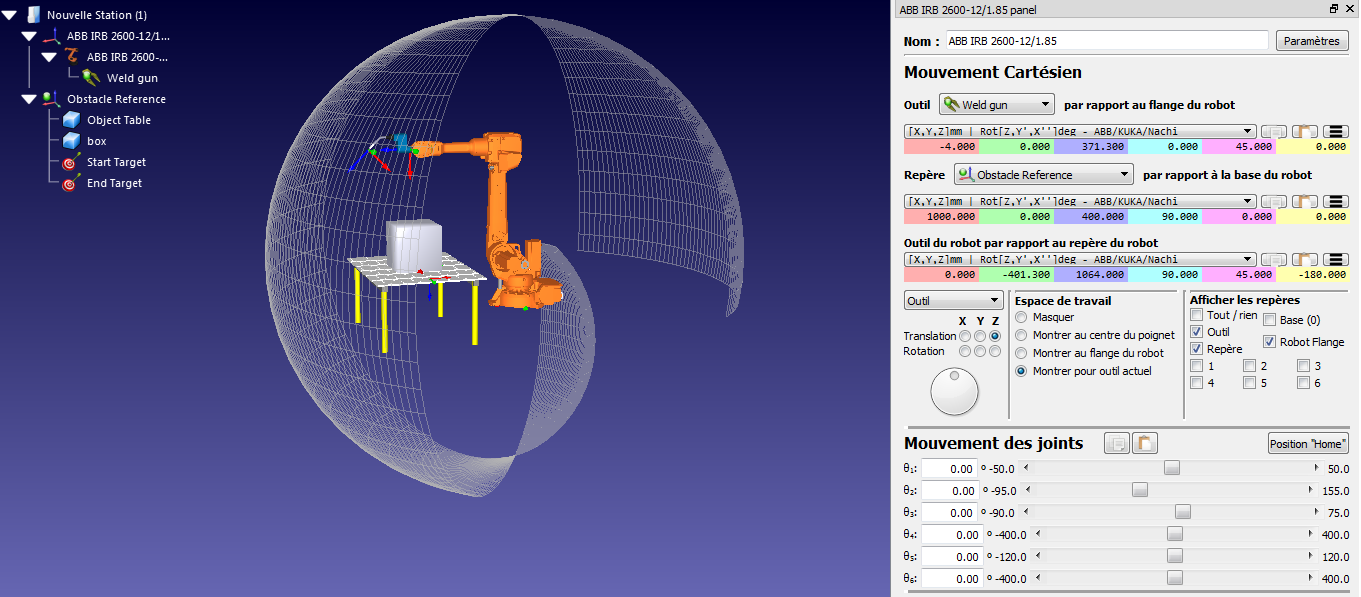
1.Faire un clic droit sur l’icône du robot dans l’arborescence de la station (ex., ABB IRB 2600-12/1.85) et sélectionner Options… pour ouvrir le panneau/fenêtre du robot. Il est possible également de double-cliquer sur le nom du robot dans l’arborescence de la station.
2.Dans la section Mouvement des joints, bouger les curseurs des joints robots que vous souhaitez restreindre. (par exemple θ1 et θ3) pour trouver où se trouve les limites inférieures de l’articulation.
3.Double-cliquer sur l’une des limites basses de la section Mouvement des joints, cela va faire apparaitre une fenêtre de réglage de limites négatif des axes.
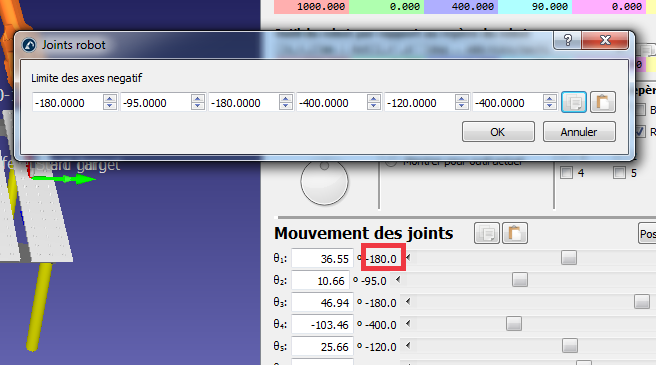
4.Paramétrer la limite inférieure de θ1 = -50 et de θ3 = -90.
5.Changer les limites et cliquer sur OK.
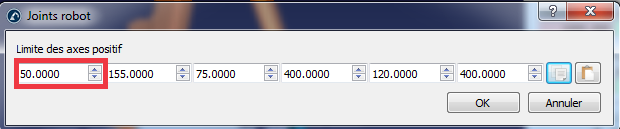
6.Même process pour les limites supérieures des joints, set θ1 = 50.
Ce changement peut être vu en regardant l’espace de travail accessible du robot. Afficher l’espace de travail en sélectionnant l’option Afficher pour l’outil actuel dans la section Espace de travail du panneau/fenêtre du robot. Il montrera que seule la partie de l’espace de travail est maintenant accessible avec les nouvelles limites communes.