Sélectionner Outils➔ Vérifier collisions afin d’activer ou désactiver la détection de collision. Si la détection de collision est activée, tous les programmes et mouvements robots s’arrêteront lorsqu’une collision est détectée. Tous les objets, outils et robot liés à une collision seront coloriés en rouge lorsqu’une collision est détectée.
Suivre les étapes suivantes afin de vérifier les collisions d’un programme :
1.Faire un clic droit sur un programme.
2.Sélectionner Vérifier parcours et Collisions (Shift+F5). Cette option vérifie rapidement si le parcours est faisable. (Idem que Vérifier parcours (F5)) et valide qu’il n’y a pas de collision.
Important : Les étapes de vérification de collisions sont définies dans Outils➔Options➔Mouvement. Elles définissent les étapes de vérification de collisions.
Astuce : Assurez-vous de modéliser avec précision la cellule robot dans RoboDK. Il est également recommandé de rendre la géométrie 3D plus grande qu’ils ne le sont réellement pour anticiper les collisions en toute sécurité.
Note : Si vous souhaitez continuer à simuler un programme même si une collision est détectée, vous pouvez aller dans Outils➔Options➔Mouvementet décocher l’option Arrêter le mouvement des robots avec une collision.
Carte de Collision
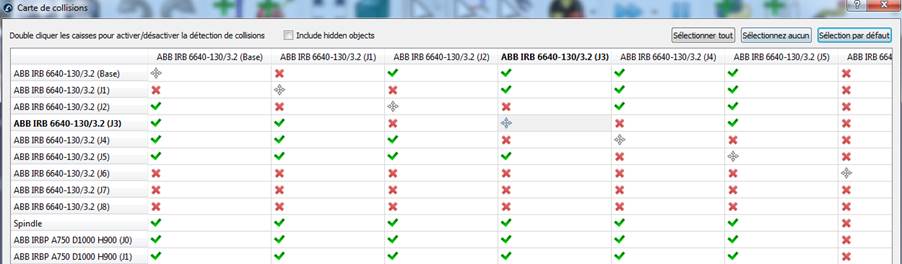
Il est possible de spécifier si l’interaction entre une paire d’objets est vérifiée pour les collisions en sélectionnant Outils➔ Carte de Collisions (Maj+X). Cela ouvre une nouvelle fenêtre affichant toutes les relations et l’état de vérification de collision. Double-cliquer sur une cellule pour activer ou désactiver la vérification de collision pour cette relation. Sélectionner Sélection par défaut pour configurer automatiquement une sélection conservatrice.
Par défaut, RoboDK vérifie les collisions entre tous les objets en mouvement dans la station, y compris tous les liens de robot, les objets et les outils. À titre d’exception, les articulations de robot consécutives ne sont pas vérifiées pour les collisions, car elles sont toujours en contact.
Astuce : Double-cliquer sur l’une des icônes de la diagonale pour vérifier/décocher les collisions d’un objet spécifique par rapport à tous les autres objets.
Astuce : Si la simulation ralentit en raison de la vérification des collisions, il peut être préférable de réduire le nombre de vérifications pour utiliser moins de puissance informatique pour la vérification des collisions.
Détection de collision rapide
La vitesse de détection des collisions dépend fortement des facteurs suivants :
1.Le nombre de paires de vérifications définies dans la carte de collision. Il sera plus rapide d’avoir une carte de collision avec moins de vérifications.
2.L’étape du robot utilisée pour la vérification des collisions. L’étape de collision peut être modifiée dans le menu Outils➔Options➔Mouvement. Les mouvements linéaires utilisent l’étape en millimètres et les mouvements articulaires utilisent l’étape en degrés. Une étape plus grande permettra de vérifier plus rapidement les collisions, mais le résultat peut être moins précis.
3.Puissance de l’ordinateur : avoir un PC avec un CPU plus rapide et un processeur performant. Cela permettra de calculer les collisions plus rapidement.
4.La complexité des fichiers 3D. Les géométries ayant un niveau de détail plus élevé, comme les zones arrondies, nécessitent habituellement une plus grande puissance de calcul. La simplification de ces géométries et la réduction du nombre de triangles vous aideront à accélérer la vérification des collisions.
Astuce : Vous pouvez changer les paramètres des objets importés STEP/IGES afin de réduire le niveau de détails : Outils➔Options➔CAO menu. Cela créera des objets plus légers dans votre projet RoboDK. Une station avec des objets plus légers vous aidera à accélérer les simulations et la vérification des collisions. Vous obtiendrez également des fichiers RDK plus petits.