Evitement automatique de collision pour de l’usinage
Suivre ces étapes pour activer la vérification automatique de collision et l’évitement de collision pour un projet d’usinage robot :
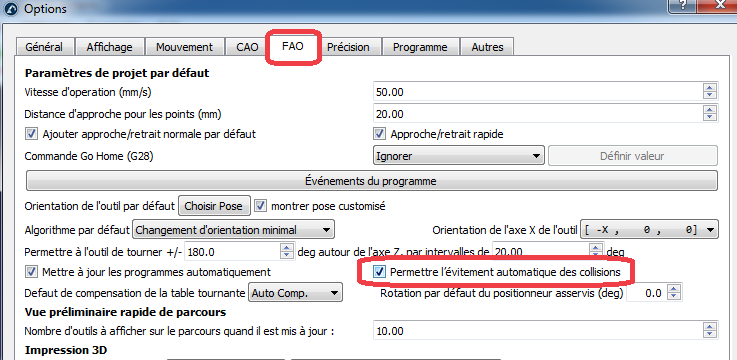
1.Sélectionner Outils➔Options➔FAO
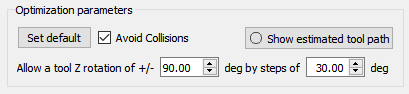
2.Cocher Allow automatic collision avoidance
3.Double-cliquer sur le projet d’usinage robotisé, impression 3D, suivi de courbe ou projet de suivi de point.
4.Cocher Permettre l’évitement automatique des collisions : cela va activer l’évitement automatique des collisions en modifiant l’orientation de l’outil autour de l’axe Z.
Important :Cette option tentera d’éviter automatiquement les collisions en tournant autour de l’axe Z de l’outil. S’assurer que l’outil n’est pas contrôlé pour les collisions avec la pièce. Si vous voulez vérifier les collisions entre le porte-outil et la pièce, vous devrez peut-être diviser votre broche en 2 outils (un utilisé pour la détection des collisions et un autre avec des informations de visualisation supplémentaires).
Astuce : La détection de collision pour la trajectoire d’usinage robot peut prendre beaucoup de temps à calculer. Assurez-vous de bien rétrécir votre carte de collision pour aider à accélérer le processus de détection et d’évitement des collisions.