Lier les Cibles
La « phase demandé » du planificateur de mouvement est accessible lorsque 2 cibles ou programmes sont liés ensemble.
Pour lier deux cibles, sélectionner-les dans l’arborescence de la station. Il y a 2 manières de les sélectionner et lier :
1.Avec la touche Ctrl :
a.Clic gauche sur la cible qui doit démarrer le mouvement (dans notre exemple « Start Target »)
b.Garder enfoncé le bouton CTRL
c.Clic gauche sur la cible de destination (Exemple : « End Target »)
d.Faire un clic droit sur l’une des deux cibles et sélectionner Link selected targets. Sinon, si le panneau de Planificateur de mouvement sans collision est ouvert, cliquer sur le bouton Link selected targets/programs.
2.Avec le bouton Shift (Maj) :
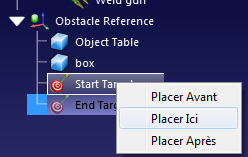
a.Placer les deux cibles l’une au-dessus de l’autre dans l’arbre des stations, avec la cible de départ au-dessus de la cible finale. Une cible peut être déplacée autour de l’arbre par glisser-déposer en utilisant le bouton droit de la souris. Le fait de relâcher la cible après l’avoir fait glisser (bouton droit) révèle un menu permettant de choisir l’endroit où la cible doit être située.
b.Cliquer (gauche) sur une cible.
c.Garder appuyé le bouton Shift (Maj).
d.Cliquer (gauche) sur la seconde cible.
e.Faire un clic droit sur l’une des deux cibles et choisir Link selected targets. Sinon, si le panneau de Planificateur de mouvement sans collision est ouvert, cliquer sur le bouton Link selected targets/programs.
Les deux méthodes généreront un nouveau programme qui relie les deux cibles à l’aide de la feuille de route sauvegardée. Pour créer un mouvement dans la direction opposée, sélectionner les cibles dans l’ordre inverse, c.-à-d. en sélectionnant Cible finale avant cible de départ à l’aide de la méthode Ctrl, ou en réarrangeant les cibles dans l’arborescence des stations pour la méthode SHIFT.