Lier des Programmes
Le planificateur de mouvement peut également lier deux programmes différents ensemble d’une manière similaire. Cela crée un parcours sans collision entre les deux programmes et crée un nouveau programme principal.
Pour l’exemple de soudure, créer deux programmes fictifs utilisant le process suivant :
1.Créer 4 cibles enfants du repère "Obstacle Reference" (clic droit sur "Obstacle Reference" dans l’arborescence de la station et cocher Repère du robot actif). Puis créer 4 cibles en sélectionnant Programme 
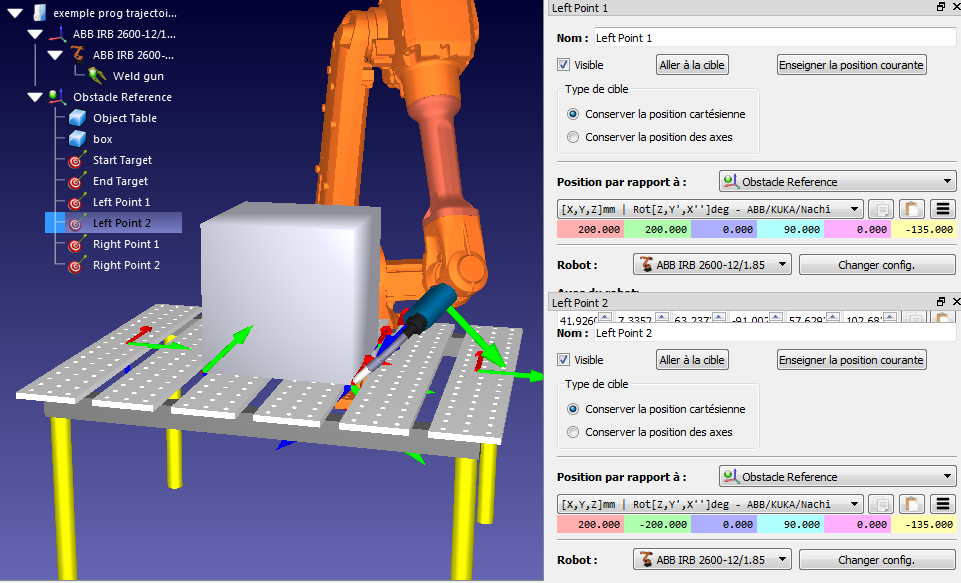
2.Sélectionner chaque nouvelle cible dans l’arborescence et entrer les noms et valeurs suivants. (F2 pour modifier le nom d’une cible). Pour changer la valeur d’une cible, appuyer sur F3, le panneau de coordonnées va apparaitre (sinon clic droit et Option).
a.Name: "Left Point 1" Values: 200, 200, 0, 90, 0, -135
b.Name: "Left Point 2" Values: 200, -200, 0, 90, 0, -135
c.Name: "Right Point 1" Values: -200, 200, 0, 90, 0, 135
d.Name: "Right Point 2" Values: -200, -200, 0, 90, 0, 135
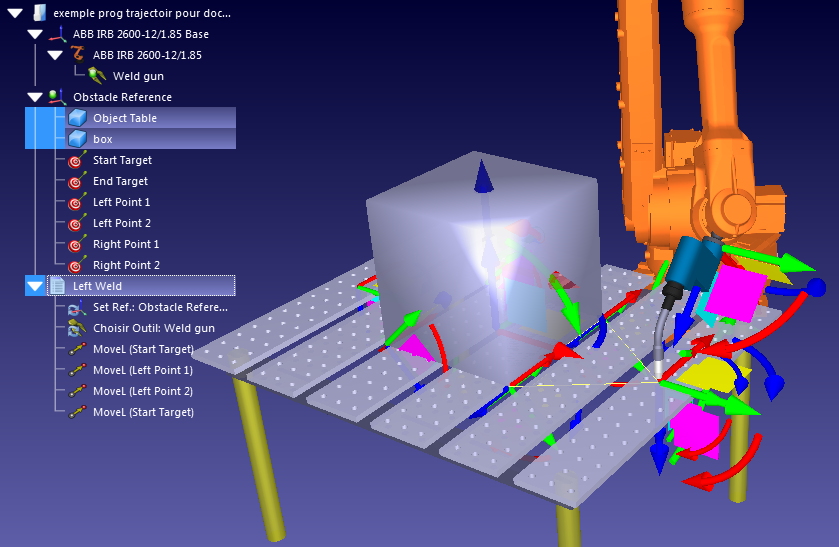
3.Créer le 1er programme :
a.Aller dans Programme➔ 
b.Renommer le programme en "Left Weld" en sélectionnant le programme dans l’arborescence et cliquant sur F2.
c.Ajouter les cibles suivantes comme instructions linéaire, en sélectionnant les cibles et en allant dans Programme➔
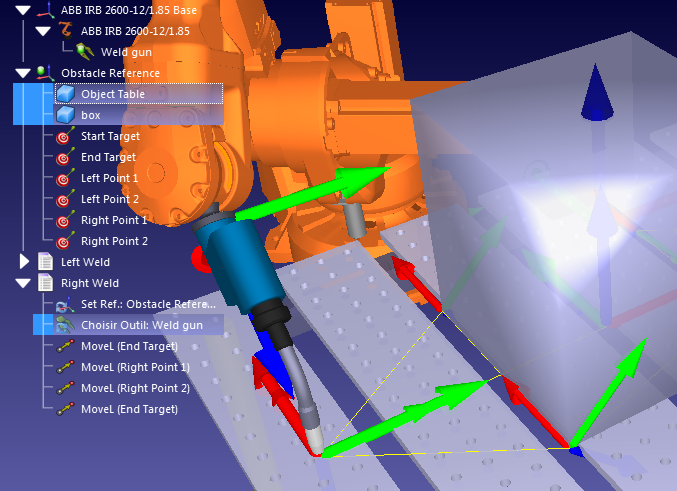
4.Créer le 2ème programme nommé "Right Weld" de la même manière, cette fois ci en utilisant les cibles suivantes : End Target, Right Point 1, Right Point 2, End Target.
Noter que ces 2 programmes ne contiennent pas l’instruction d’activer et désactiver la soudure. Dans un vrai programme, ces commandes auraient été incluses.
Afin de lier 2 programmes utilisant la planification de mouvement, suivre ces étapes :
1.Sélectionner les 2 programmes utilisant l’une des méthodes décrite dans la section précédente (lier des cibles).
2.Faire un clic droit sur l’un ou l’autre des programmes et choisir Link selected programs. Si le panneau du planificateur de mouvement sans collision est ouvert, il est possible d’en faire autant en cliquant sur Link selected targets/programs.
Un nouveau programme appelé "Mainsafe" sera créé, il exécute le premier programme, fait un mouvement sans collision, puis exécute le deuxième programme. Ce programme principal peut être modifié et renommé comme n’importe quel autre programme.