Paramétrage de la planification de mouvement
Pour utiliser le planificateur de mouvement, il doit y avoir un robot, idéalement avec un outil. Il est également logique d’avoir au moins un objet dans l’espace de travail, sinon l’évitement des collisions n’est pas nécessaire. Il peut être utile d’avoir au moins deux cibles qui serviront de points de départ et de fin pour la trajectoire sans collision générée.
L’exemple de configuration de soudage peut être créé en utilisant la procédure suivante :
1.Sélectionner un robot :
a.Sélectionner Fichier➔
b.Utiliser le filtre pour trouver un robot. Par exemple, sélectionner ABB IRB 2600-12/1.85 (choisir les filtres suivants : ABB (marque), 10-20 kg (charge) et 1500-2000mm (extension).
c.Sélectionner Download et le robot doit apparaitre automatiquement à l’écran.
2.Sélectionner un outil :
a.Depuis la même bibliothèque en ligne, filtrer par Type➔ Tool (cliquer sur Reset filter en premier afin de réinitialiser le filtre)
b.Télécharger un outil, par exemple le "Weld Gun"
c.L’outil devrait être automatiquement rattaché au robot
d.Fermer la librairie.
3.Ajouter un repère :
a.Sélectionner Programme➔
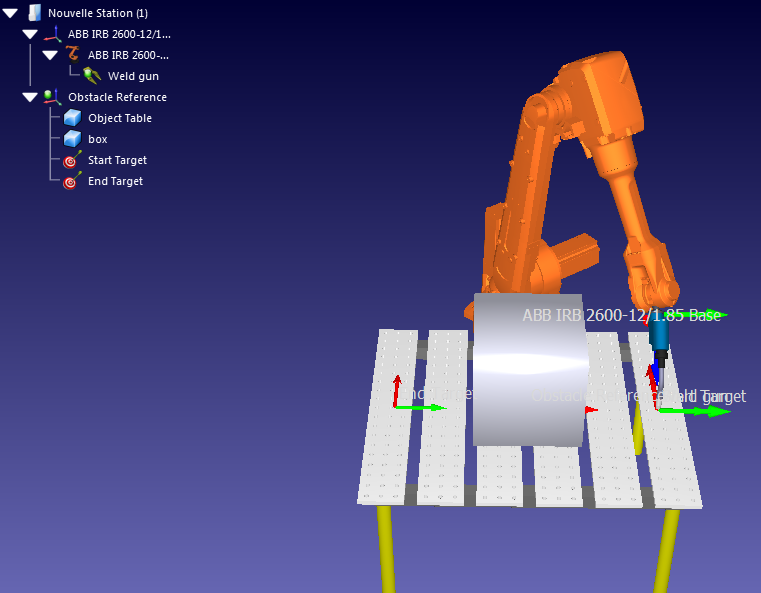
b.Sélectionner le nouveau repère dans l’arbre et appuyer sur F2 pour renommer en "Obstacle Reference"
4.Ajouter des objets :
a.Sélectionner Fichier➔
b.Sélectionner un objet, tel que l’objet "Object Table.wrl"
c.Prendre et faire glisser l’objet sur le repère Obstacle Reference dans l’arborescence de la station.
d.Sélectionner un second objet tel que "box.stl" et le rattaché au repère Obstacle Reference.
e.Bouger la table face au robot en effectuant les actions suivantes :
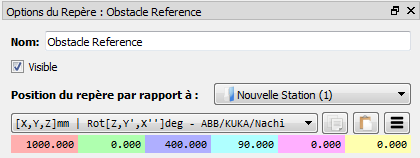
i.Faire un clic droit sur Obstacle Reference et choisir Options (sinon double cliquer sur le repère dans l’arbre)
ii.Entrer les valeurs suivantes dans la fenêtre Options du repère : 1000, 0, 400, 90, 0, 0
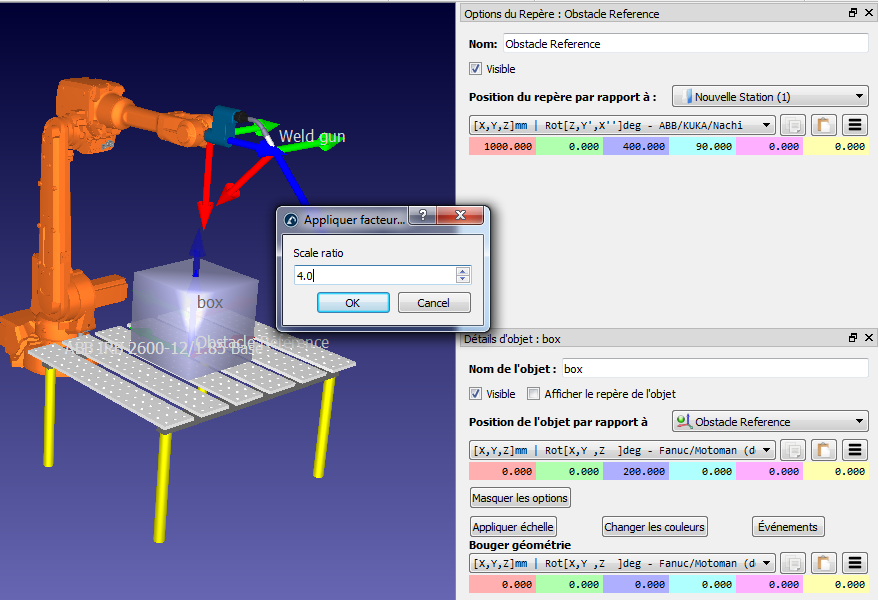
f.Si nécessaire, augmenter la taille et position de l’objet (la Box) en suivant les étapes suivantes :
iii.Faire un clic droit sur l’objet dans l’arbre de la station et choisir Options pour faire apparaitre la fenêtre détails de l’objet.
iv.Modifier l’échelle de la Box en cliquant sur Plus d’options…➔Appliquer échelle et entrer "4.0" dans le coefficient multiplicateur
v.Bouger la Box en entrant les valeurs suivantes dans la fenêtre Détails d’objet : 0, 0, 200, 0, 0, 0
5.Créer des cibles :
a.Sélectionner Programme➔
b.Renommer la nouvelle cible (F2 depuis l’arbre de la station) en Start Target.
c.Bouger la cible en faisant cela :
vi.Faire un clic droit sur la cible depuis l’arbre de la station et choisir Options (ou appuyer F3) pour faire apparaitre la fenêtre de Détails de Start Target.
vii.Entrer les valeurs suivantes : 500, 0, 0, 90, 0, 180
d.Créer une deuxième cible, de la même manière, et renommer-la en End Target. Changer la position de la cible à : -500, 0, 0, 90, 0, 180