Calibrage œil-main
L'étalonnage main-œil consiste à étalonner la position de la caméra par rapport à la bride ou à l'outil du robot.
RoboDK vous permet de simuler le processus d'étalonnage main-œil. Vous pouvez utiliser la même procédure pour calibrer des caméras réelles par rapport à la bride ou à l'outil du robot.
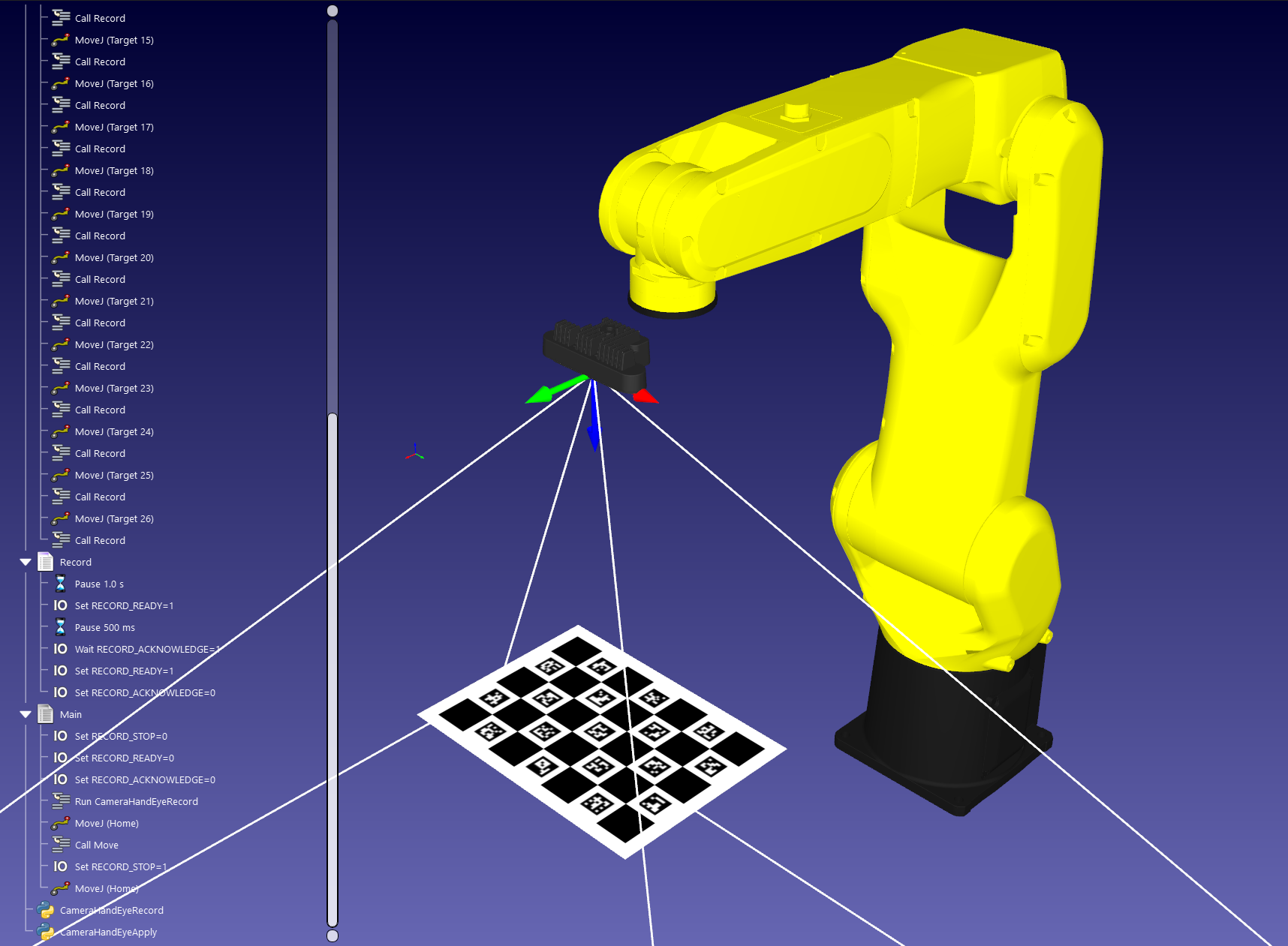
Vous trouverez un exemple complet dans la section des exemples de l'API RoboDK pour Python : https://robodk.com/doc/en/PythonAPI/examples.html#camera-hand-eye-calibration.