Mold Machining
Introduction
Cet exemple vous aidera à créer un projet simple d'usinage 3 axes dans RoboDK en utilisant le plugin Mastercam. Dans cet exemple, un robot Motoman équipé d'un outil de coupe est simulé et programmé pour usiner un moule simple en utilisant le robot comme une machine 3 axes. Vous apprendrez à transformer un programme CNC en une simulation de robot et un programme de robot.
Vidéo : Programmation d'un robot avec Mastercam pour une application d'usinage de moules à 3 axes
Avec le plug-in RoboDK pour Mastercam, vous pouvez rapidement mettre en place des projets d'usinage de robots directement de Mastercam à RoboDK. Ce plug-in vous permet de programmer plus de 50 fabricants de robots différents et 500 robots directement à partir de Mastercam.
Le plug-in RoboDK pour Mastercam prend en charge les fichiers NCI (fichiers Mastercam prétraités en natif) et les fichiers APT CLS et G-code standard. Le plug-in est gratuit si vous avez acheté une licence RoboDK.
Usinage de robots moules à 3 axes
Pour démarrer le projet, vous devrez d'abord sélectionner l'exemple d'usinage de moule à 3 axes de RoboDK dans la bibliothèque par défaut.
Paramètres RoboDK
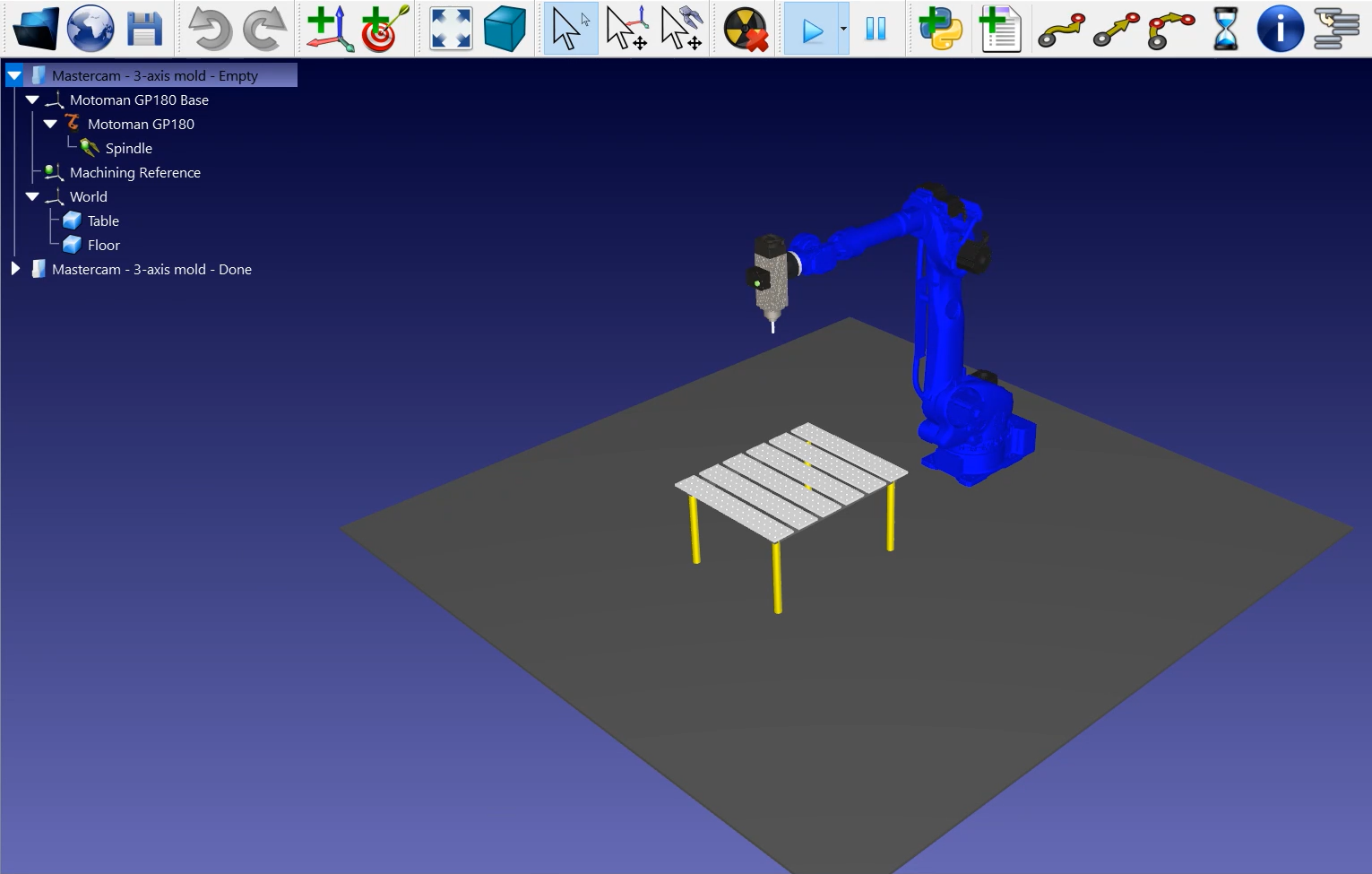
Cet exemple utilise le robot Motoman GP180, un outil de coupe monté sur une broche et une table pour maintenir la pièce en place.
Chargez la station :
1.Sélectionnez File ➔
2.Localisez l'exemple d'usinage de moule à 3 axes dans la section des exemples de RoboDK :
C:/RoboDK/Examples/ Plugin-Mastercam-3-Axis-Mold-Machining.rdk.
Maintenant que vous avez chargé la station, vous pouvez ouvrir Mastercam et charger le projet à partir de C:/RoboDK/Other/Plugin-Mastercam/Examples/Mold.mcam.
Parcours d'usinage dans Mastercam
Ouvrez votre objet 3D dans Mastercam et lancez la simulation de découpe. Dans cet exemple, l'objet 3D est une pièce métallique moulée avec un parcours de découpe déjà créé à l'aide des outils Mastercam.
Pour simplifier cet exemple, le nombre de passes nécessaires pour usiner cette pièce a été considérablement réduit. En réalité, vous auriez beaucoup plus de lignes ou de parcours de coupe dans le moule que vous ne pourriez pas vraiment voir l'outil en action.
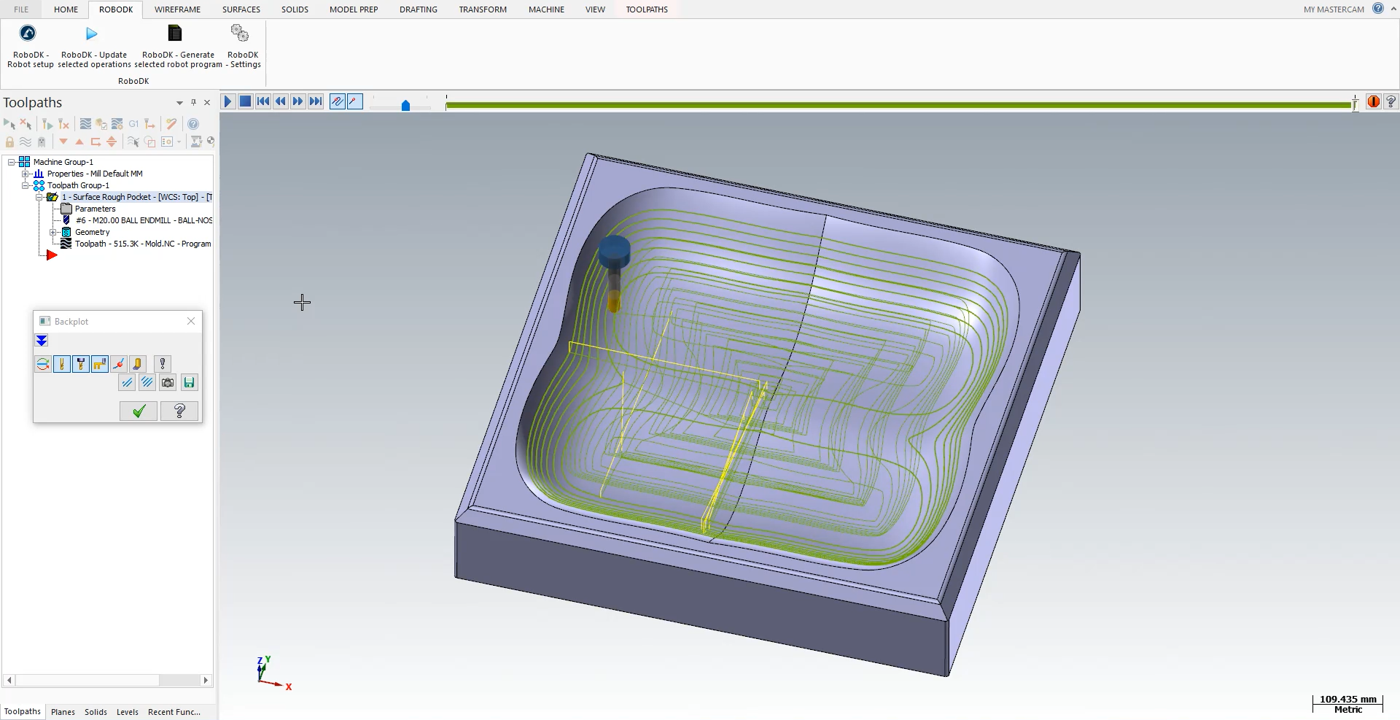
La simulation de coupe Mastercam vous montre tous les mouvements que l'outil doit effectuer pendant le programme.
Suivez les étapes suivantes pour charger votre pièce dans RoboDK :
1.Sélectionnez l'onglet RoboDK et choisissez RoboDK - Robot setup.
2.Sélectionnez Load Part.
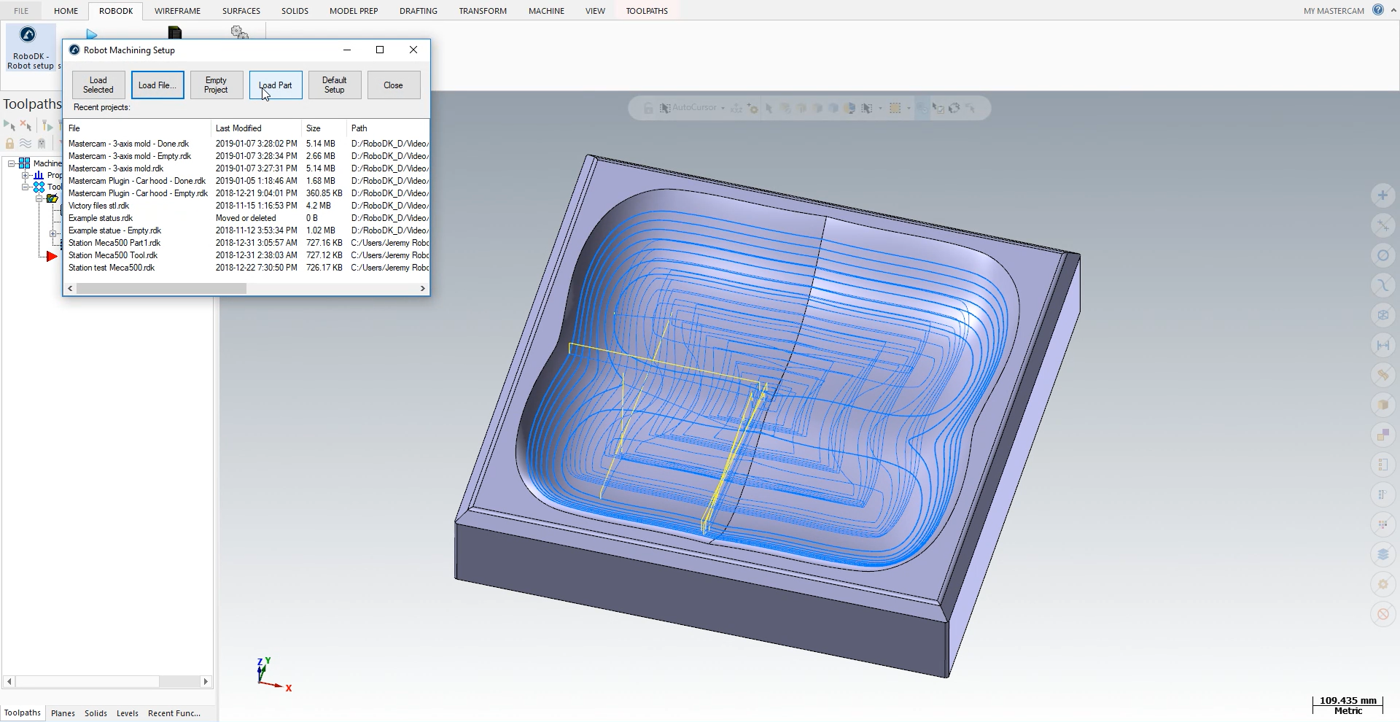
Vous devez voir la pièce chargée sur le système de coordonnées actif (Référence d'usinage) sur la table de la station RoboDK.
L'étape suivante consiste à importer le parcours de coupe de Mastercam vers RoboDK.
1.Sélectionnez l'onglet RoboDK dans Mastercam.
2.Sélectionnez RoboDK - Mettez à jour les opérations sélectionnées.
3.Allez dans RoboDK.
Usinage de robots dans RoboDK
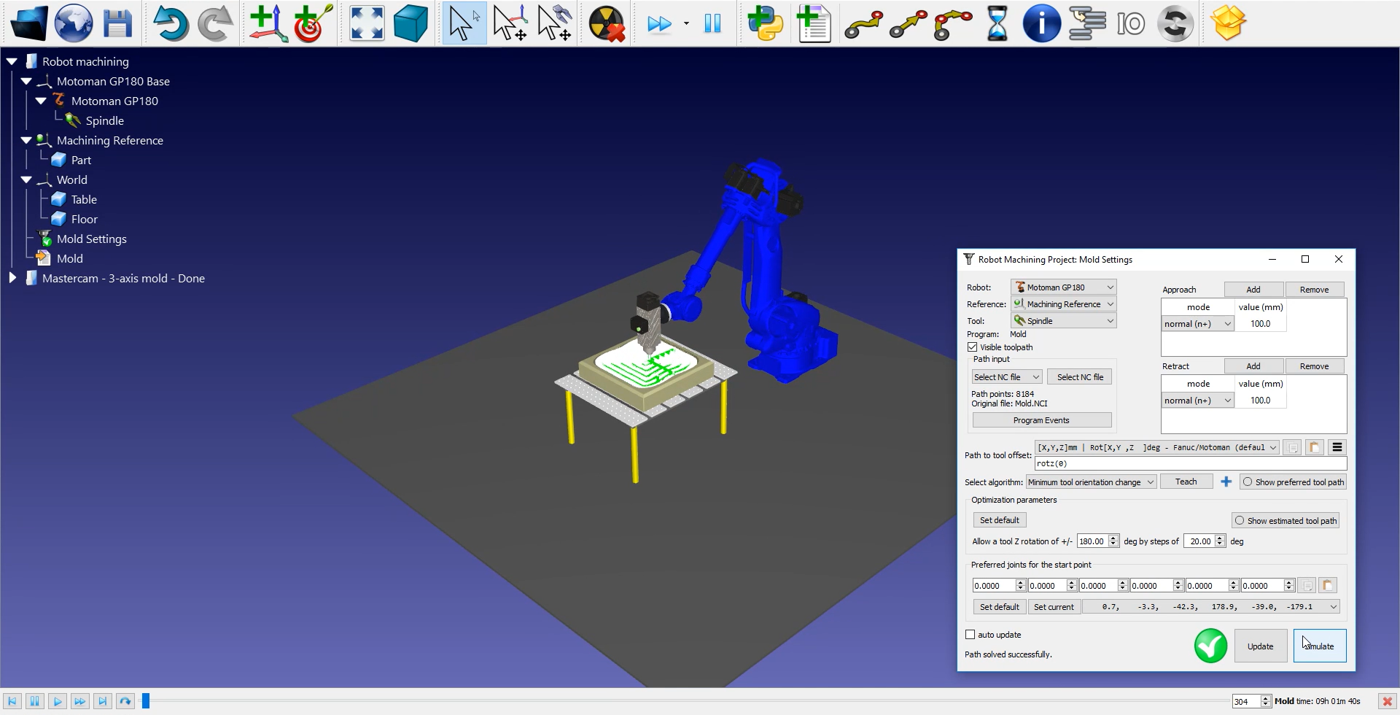
Une fois que le parcours d'usinage du robot a été importé dans RoboDK, vous devez voir le parcours d'usinage du robot attaché à la référence du moule de votre station RoboDK. Dans
Vous pouvez également ajuster la valeur des mouvements d'approche et de rétraction avant et après le parcours de coupe. Dans cet exemple, une valeur de 100 mm devrait suffire. S'il existe un risque de collision, vous pouvez augmenter ces valeurs autant que vous le souhaitez à l'intérieur de la zone de travail du robot.
L'étape suivante consiste à vérifier si l'ordre dans lequel les sections du parcours seront exécutées est correct en sélectionnant

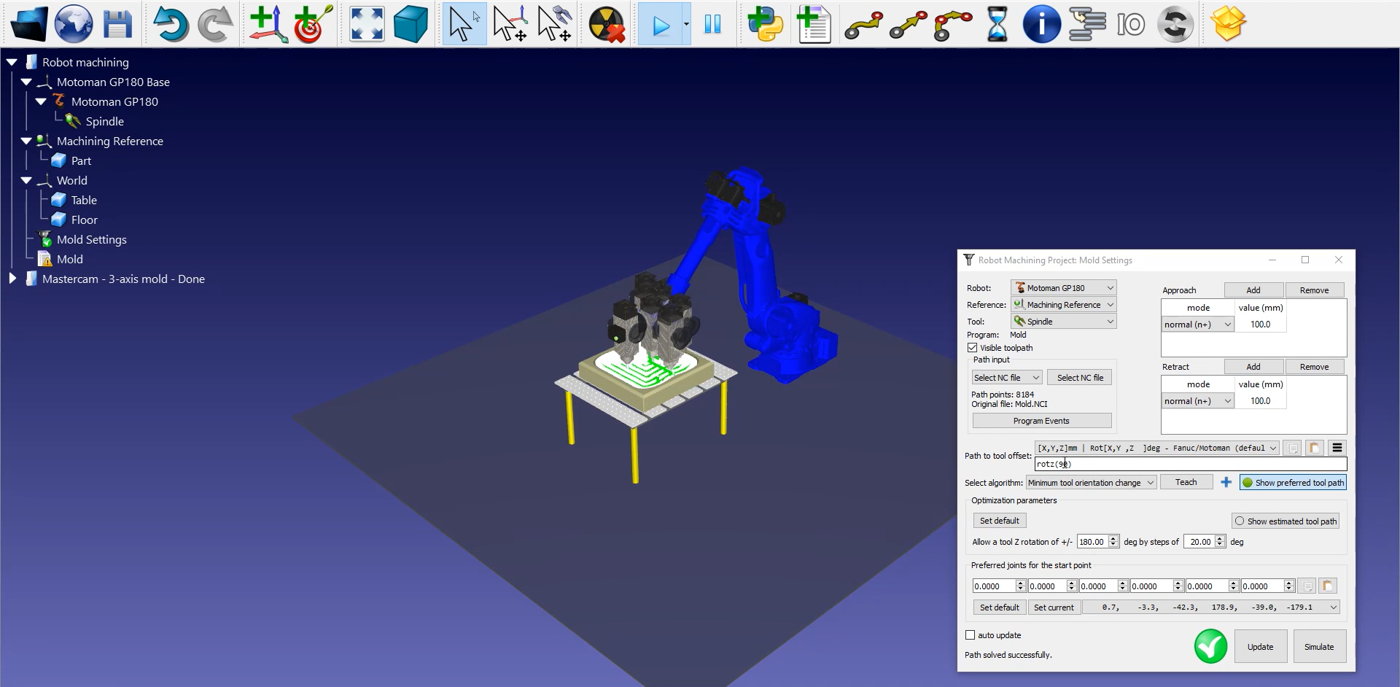
Procédez comme suit pour ajuster l'orientation de l'outil :
1.Double-cliquez sur le site
2.Sélectionnez Afficher le parcours d'outil préféré. Des outils fantômes apparaissent, comme le montre l'image ci-dessous. Ils représentent la position de votre outil le long du parcours.
3.Modifiez la valeur de rotz (0) en faisant défiler votre roue vers le haut jusqu'à 90 degrés. Vous verrez la valeur de rotz changer et la position des péages fantômes changer avec elle.
4.Sélectionnez Update➔ Simulate.
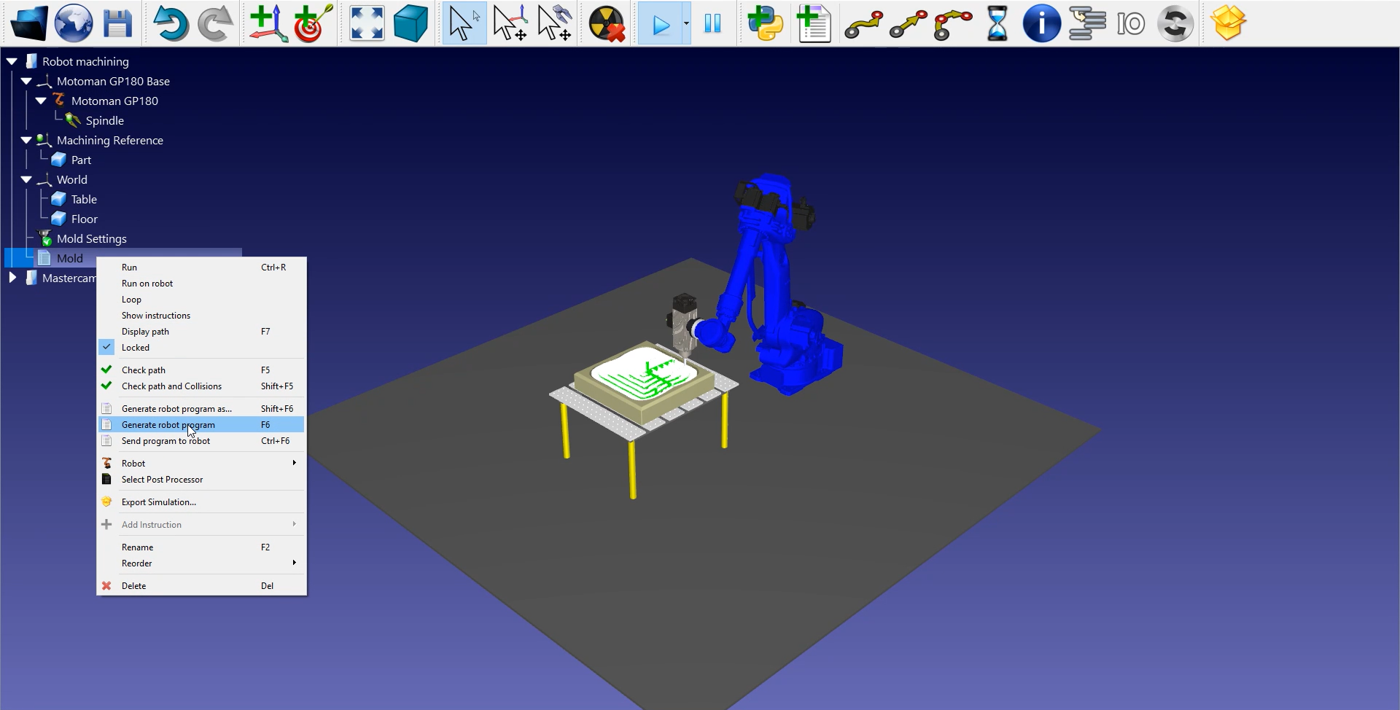
Pour générer le programme de votre robot, assurez-vous d'utiliser le bon post-processeur. Double-cliquez sur le robot
Enfin, cliquez avec le bouton droit de la souris sur
Le fichier JBI du Motoman est maintenant prêt à être transféré vers le contrôleur de votre robot.