Créer le parcours d'usinage d'un robot
Vous pouvez créer la simulation d'usinage du robot dans RoboDK une fois que vous avez chargé le fichier APT en sélectionnant Mettre à jour. Cela vous permet de voir si le robot peut effectuer l'opération de fabrication.
Cet exemple est une simple opération d'usinage à 3 axes, et les paramètres par défaut donnent un résultat valable. Le projet d'usinage robotisé vous permet de contrôler le comportement du robot le long du parcours d'usinage.
Vous pouvez suivre les étapes suivantes pour mettre à jour les autres opérations d'usinage du robot :
1.Sélectionnez une ou plusieurs opérations d'usinage robotisé (en maintenant la touche Shift enfoncée, vous pouvez générer plusieurs éléments dans l'arbre).
2.Cliquez avec le bouton droit de la souris sur le(s) élément(s) sélectionné(s).
3.Sélectionnez Mettre à jour les programmes.
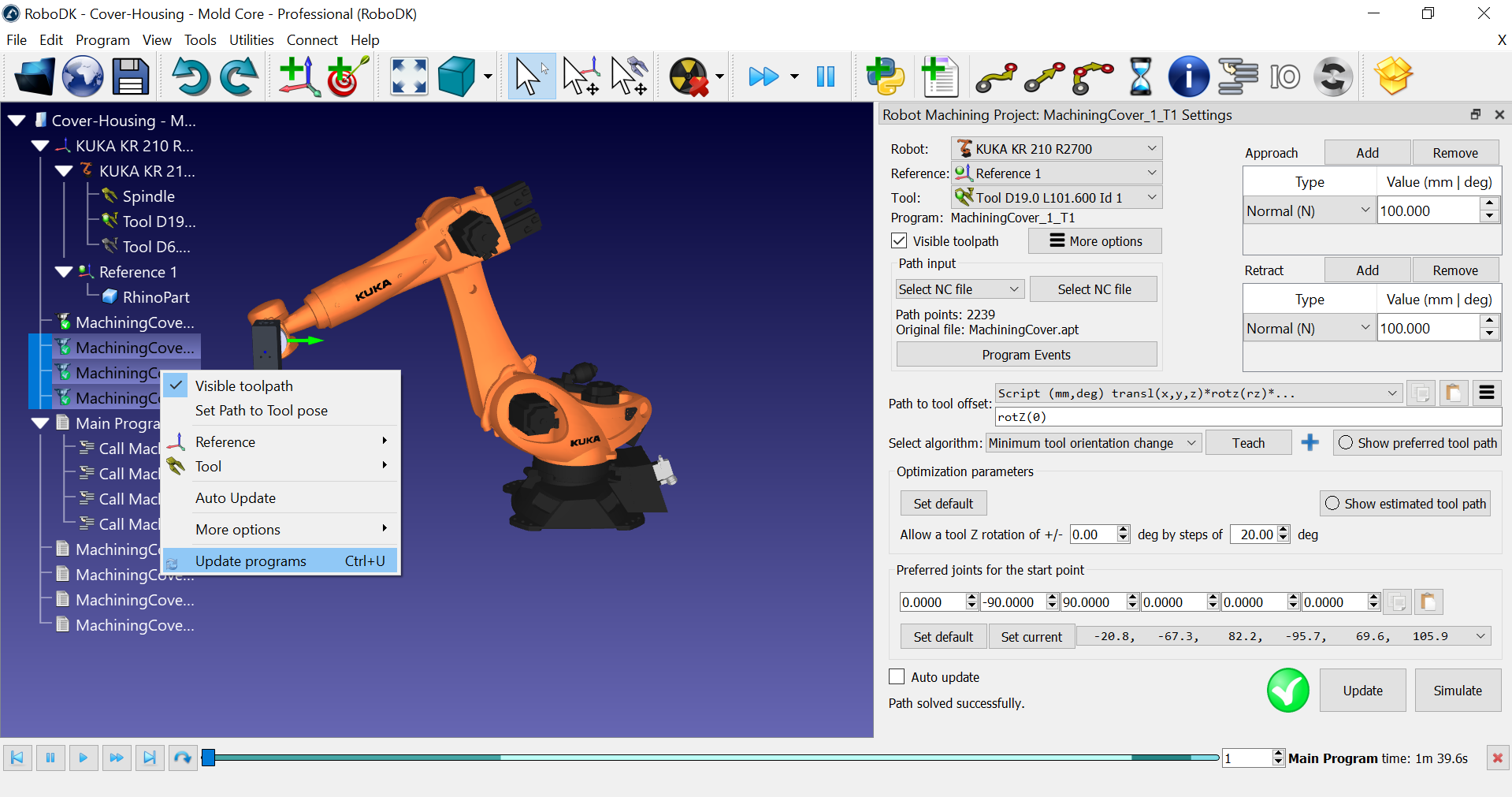
Lorsque RoboDK calcule le parcours d'usinage du robot, il crée un nouveau programme de robot pour chaque opération d'usinage. Les icônes blanches représentent les programmes de robot. Ces programmes sont créés automatiquement par RoboDK. Vous pouvez simuler chaque programme individuellement en double-cliquant dessus dans l'arbre.
RoboDK crée également automatiquement un programme principal que vous pouvez exécuter pour simuler toutes les opérations d'usinage du robot dans l'ordre.