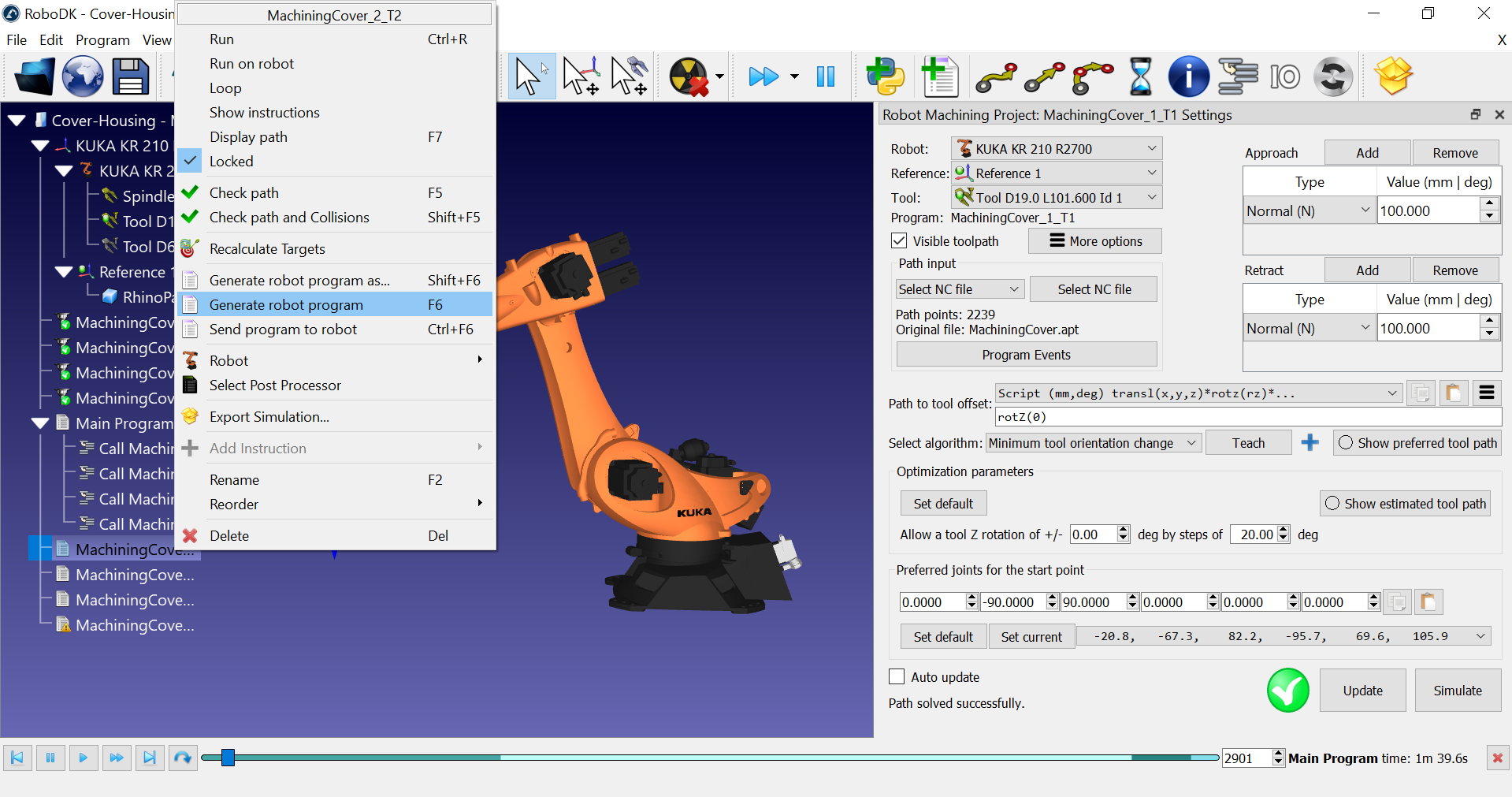
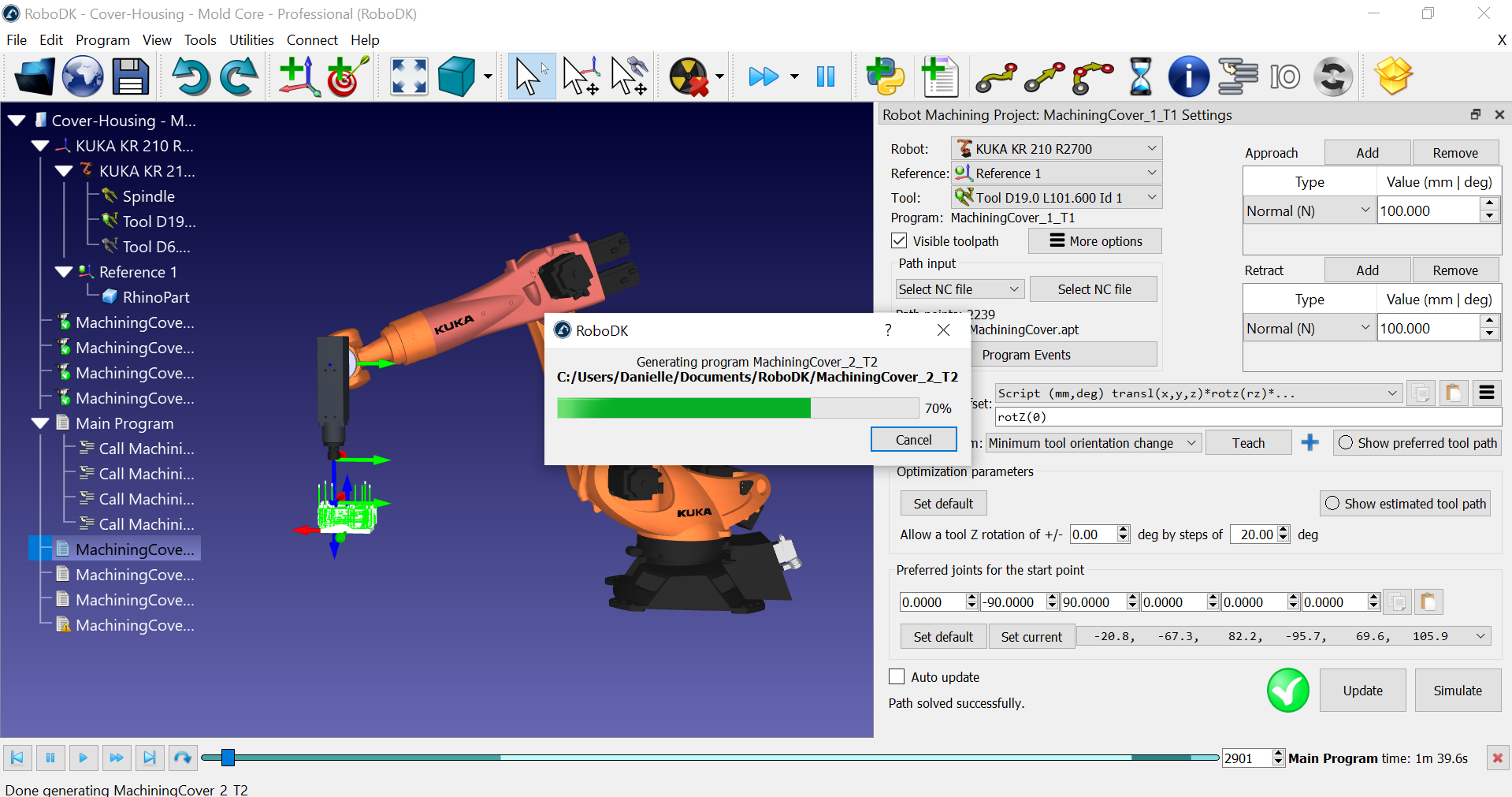
Générer les programmes du robot
Vous pouvez cliquer avec le bouton droit de la souris sur un ou plusieurs programmes et sélectionner Générer les programmes du robot pour générer ou mettre à jour les programmes du robot (fichiers) pour votre système de commande du robot.
Dans cet exemple, si nous utilisons un contrôleur de robot KUKA KRC, nous obtiendrons des fichiers de programme SRC.
Vous devriez voir la référence et l'outil définis dans le programme de la même manière que vous les avez définis dans RoboDK.
Vous pouvez également utiliser des références numérotées et des noms d'outils pour utiliser les valeurs stockées dans le contrôleur en fonction de leur ID.
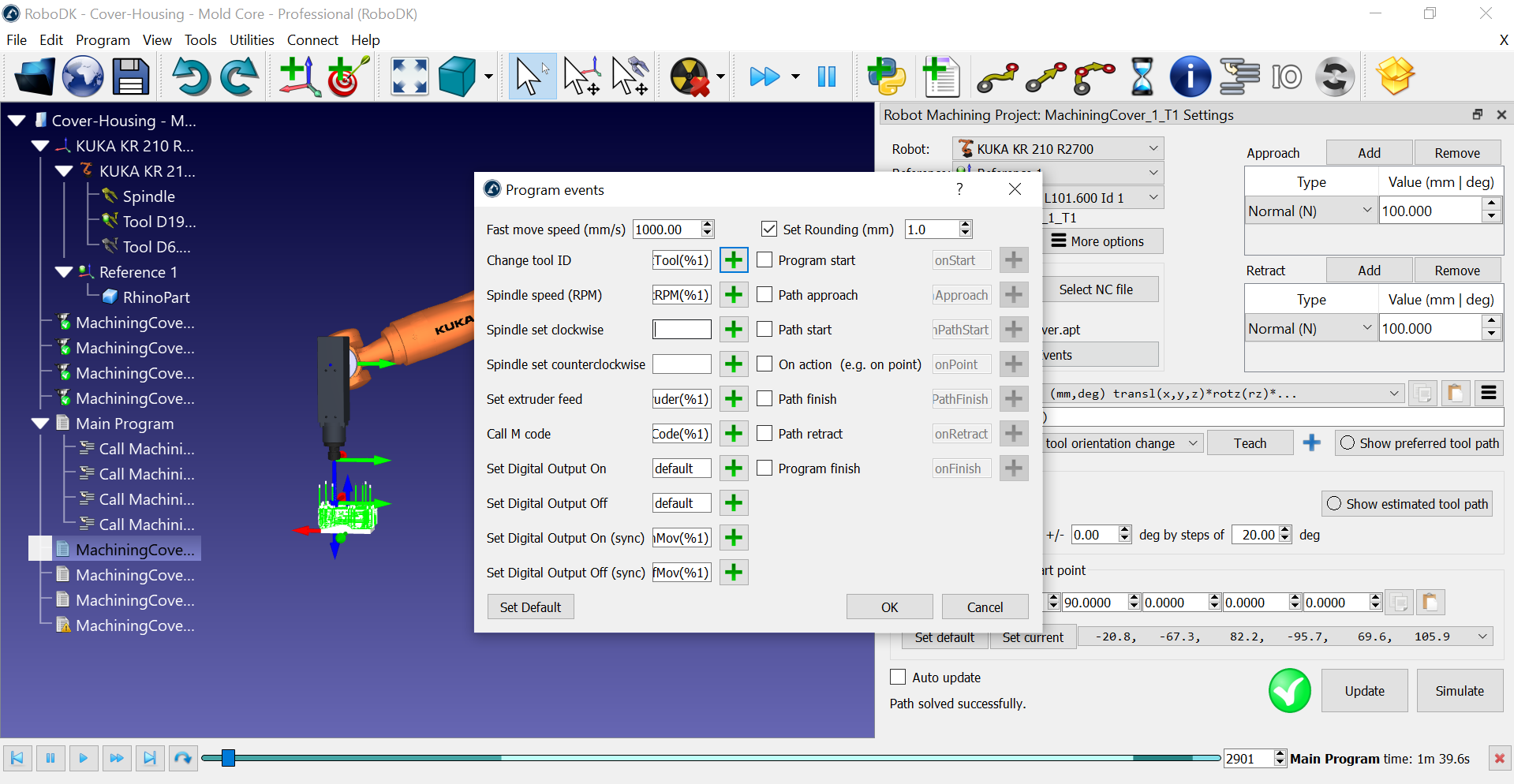
Vous pouvez voir des appels de programme personnalisés pour sélectionner l'outil correct en fonction de votre ID d'outil et activer la broche. Ces paramètres peuvent être personnalisés dans le menu Événements du programme. Vous pouvez déclencher une procédure spéciale sur votre contrôleur de robot lorsqu'une certaine commande d'usinage doit être exécutée, comme le changement d'outil, la vitesse de la broche ou l'exécution de codes M.