Personnaliser l'orientation de l'outil
La plupart des opérations d'usinage ou de fabrication impliquent une contrainte à 5 axes. Alors que la position de l'outil (CDO) et l'axe de coupe sont définis, vous disposez d'un degré de liberté supplémentaire à définir lorsque vous utilisez un bras robotisé à 6 axes. Ce degré de liberté vous permet de tourner autour de l'axe de coupe et d'éviter automatiquement les singularités et les limites d'axe.
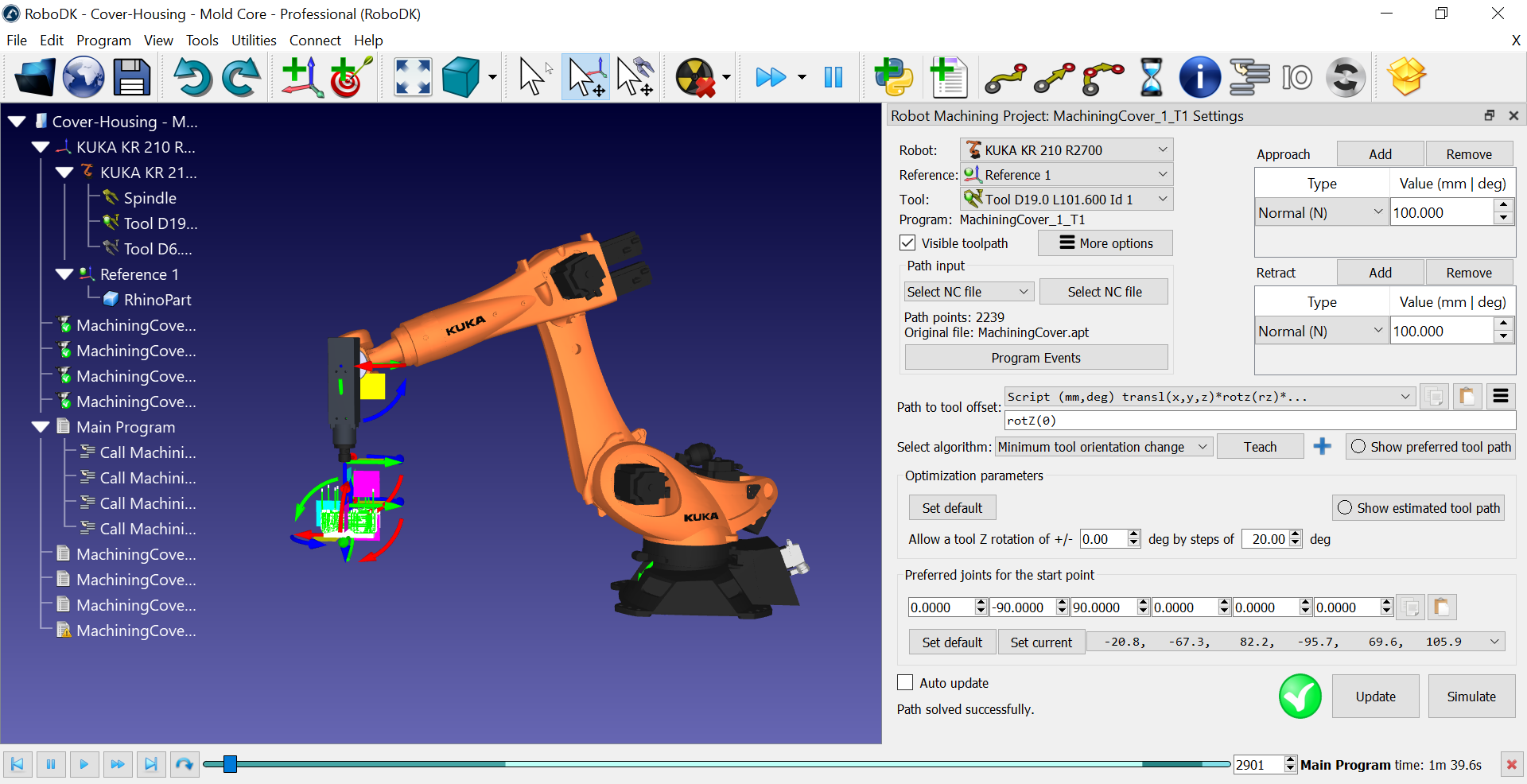
La manière la plus simple de personnaliser l'orientation de l'outil consiste à sélectionner le bouton Apprendre dans le projet d'usinage du robot. En sélectionnant Apprentissage, vous indiquez à RoboDK que vous souhaitez suivre l'orientation actuelle de l'outil et que les paramètres s'adapteront à cette orientation.
En sélectionnant le parcours d'outil préféré de Show, nous pouvons prévisualiser l'orientation de l'outil que le robot tente de suivre.
Vous pouvez sélectionner Mettre à jour et Simuler pour voir le résultat.
Les paramètres d'optimisation permettent au robot de modifier automatiquement l'orientation de l'outil s'il ne parvient pas à obtenir l'orientation souhaitée. Ce paramètre est important si vous avez une grande pièce, si vous travaillez près d'une singularité ou près des limites de l'espace de travail du robot. Si vous voyez une marque rouge, cela signifie que le robot ne peut pas effectuer l'opération.
Si vous sélectionnez Afficher le parcours estimé de l'outil, vous devriez voir en vert les positions qui peuvent être atteintes. Cela vous donnera une idée de l'orientation à adopter pour que le parcours soit réalisable. Cela signifie que nous utilisons le degré de liberté supplémentaire pour éviter automatiquement les singularités du robot et les limites des axes.