Robot Machining
Introduction
Cet exemple vous aidera à comprendre les bases de l'usinage robotisé dans RoboDK et à convertir une tâche d'usinage robotisé à 3 axes en une simulation d'usinage robotisé et un programme de robot.
Une fois que vous avez défini votre stratégie d'usinage avec votre logiciel de FAO, vous pouvez exporter votre programme d'usinage sous forme de Gcode ou de fichier APT afin de le charger dans RoboDK pour créer un projet d'usinage de robot. Dans cet exemple, nous utiliserons un fichier APT pour créer un projet d'usinage de robot.
Vous pouvez trouver cet exemple de projet RoboDK à l'emplacement suivant : C:/RoboDK/Other/Plugin-MecSoft/Mold-Core.rdk.
Exemple d'usinage robotisé (3 axes)
Dans cet exemple, vous apprendrez à convertir un programme d'usinage en une simulation d'usinage de robot et en un programme de robot. Plus précisément, vous apprendrez à générer des programmes de robot valables pour votre contrôleur de robot à partir de fichiers CN tels qu'un fichier APT.
Programme d'usinage en RhinoCAM
Cette section montre comment vous pouvez exporter un travail d'usinage du logiciel RhinoCAM de Mecsoft vers RoboDK. Un fichier APT est utilisé pour charger le parcours d'outil dans RoboDK et envoyé automatiquement à l'aide d'un fichier BAT personnalisé.
Suivez ces étapes dans RhinoCAM pour exporter le travail d'usinage vers RoboDK :
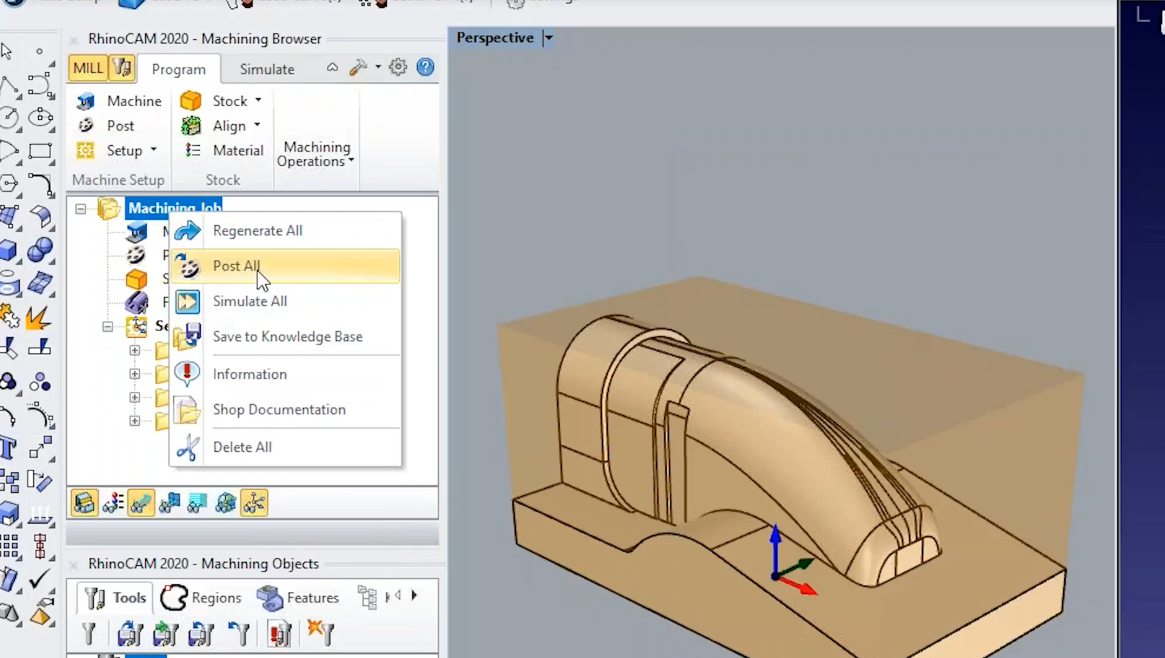
1.Cliquez avec le bouton droit de la souris sur votre projet d'usinage dans RhinoCAM.
2.Sélectionnez Post All pour générer les programmes d'usinage et charger automatiquement le tout dans RoboDK.
Vous pouvez voir que RoboDK divise automatiquement le programme d'usinage du robot dans les mêmes 4 opérations d'usinage que nous avons créées dans le logiciel de FAO.
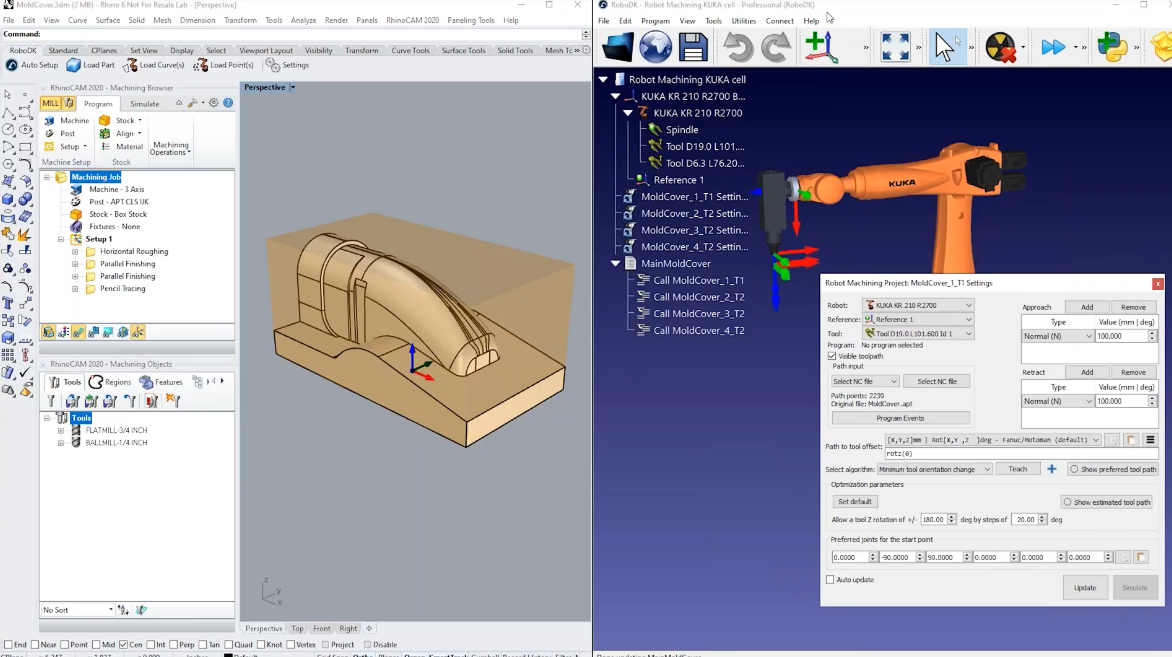
Le projet d'usinage robotisé est créé à l'aide d'une cellule robotisée par défaut que nous pouvons personnaliser. Dans cet exemple, nous utilisons un robot KUKA et une broche par défaut où l'outil (ou CDO) représente le porte-outil.
Par défaut, lors du chargement des programmes APT, RoboDK ajoutera les outils que vous définissez dans votre projet d'usinage. Les outils sont ajoutés à votre CDO actif lorsque vous chargez le fichier APT. Les outils corrects seront également présélectionnés dans votre projet d'usinage du robot.
Projet d'usinage de robot (3x)
Cette section montre comment personnaliser la configuration du robot et le parcours d'usinage pour réussir l'usinage robotisé. Le projet d'usinage de RoboDK vous permet de convertir n'importe quelle opération de fabrication générique à 3 ou 5 axes en une simulation de robot et un programme de robot.
Comme nous avons chargé le fichier d'usinage directement, tout a été créé et sélectionné automatiquement. Nous pouvons également personnaliser les mouvements d'approche et de rétraction dans RoboDK.
Créer le parcours d'usinage d'un robot
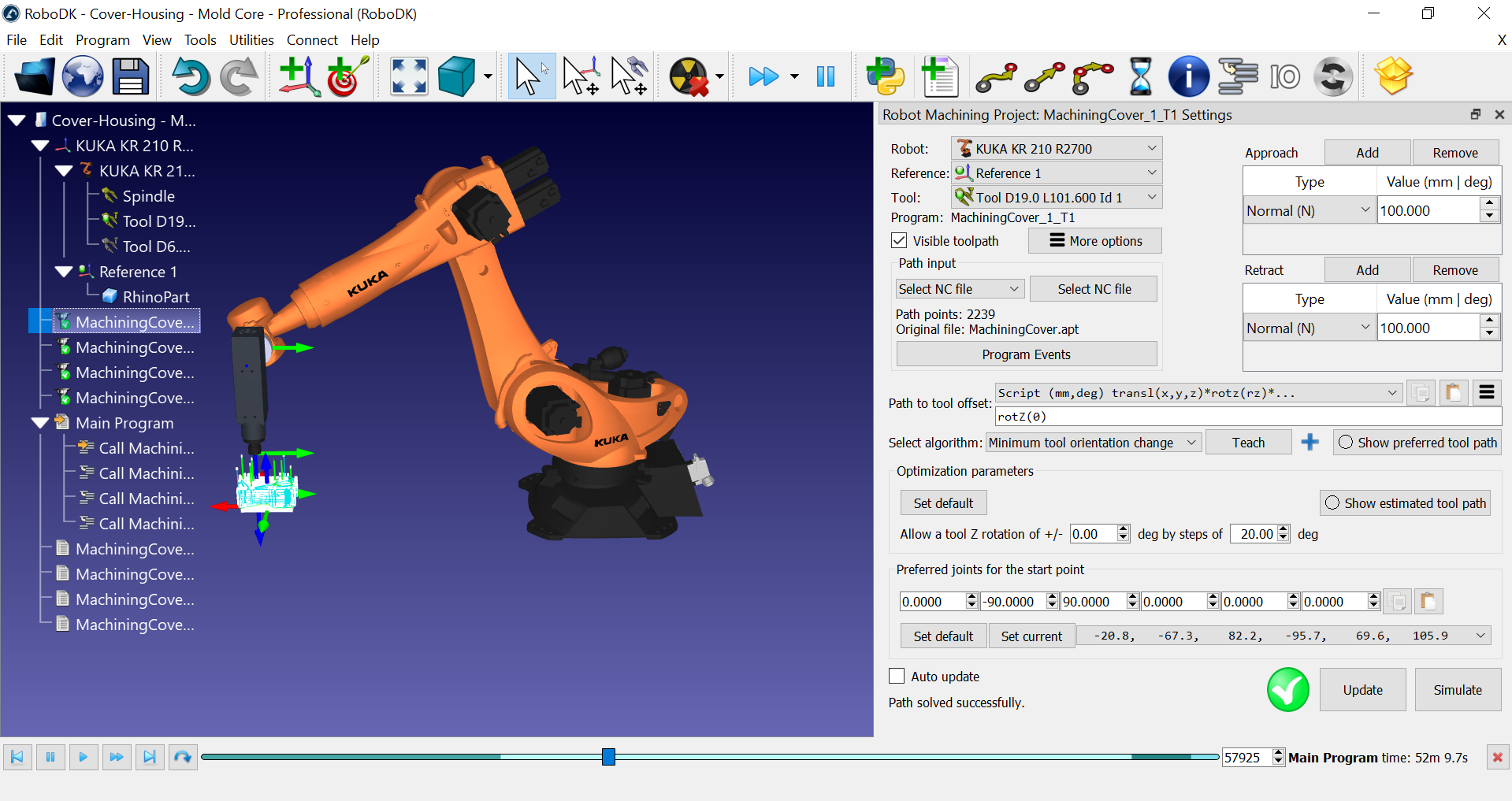
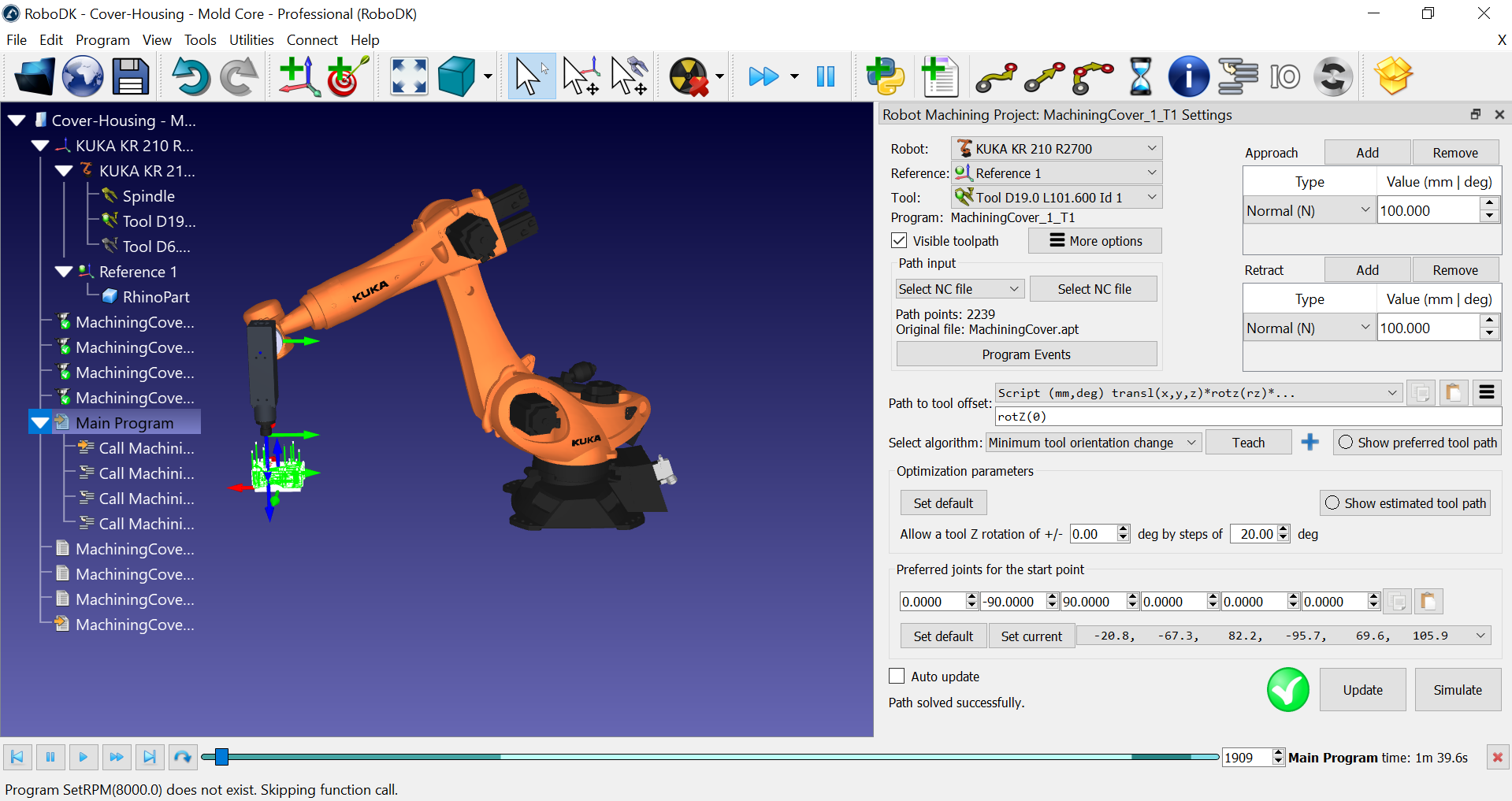
Vous pouvez créer la simulation d'usinage du robot dans RoboDK une fois que vous avez chargé le fichier APT en sélectionnant Mettre à jour. Cela vous permet de voir si le robot peut effectuer l'opération de fabrication.
Cet exemple est une simple opération d'usinage à 3 axes, et les paramètres par défaut donnent un résultat valable. Le projet d'usinage robotisé vous permet de contrôler le comportement du robot le long du parcours d'usinage.
Vous pouvez suivre les étapes suivantes pour mettre à jour les autres opérations d'usinage du robot :
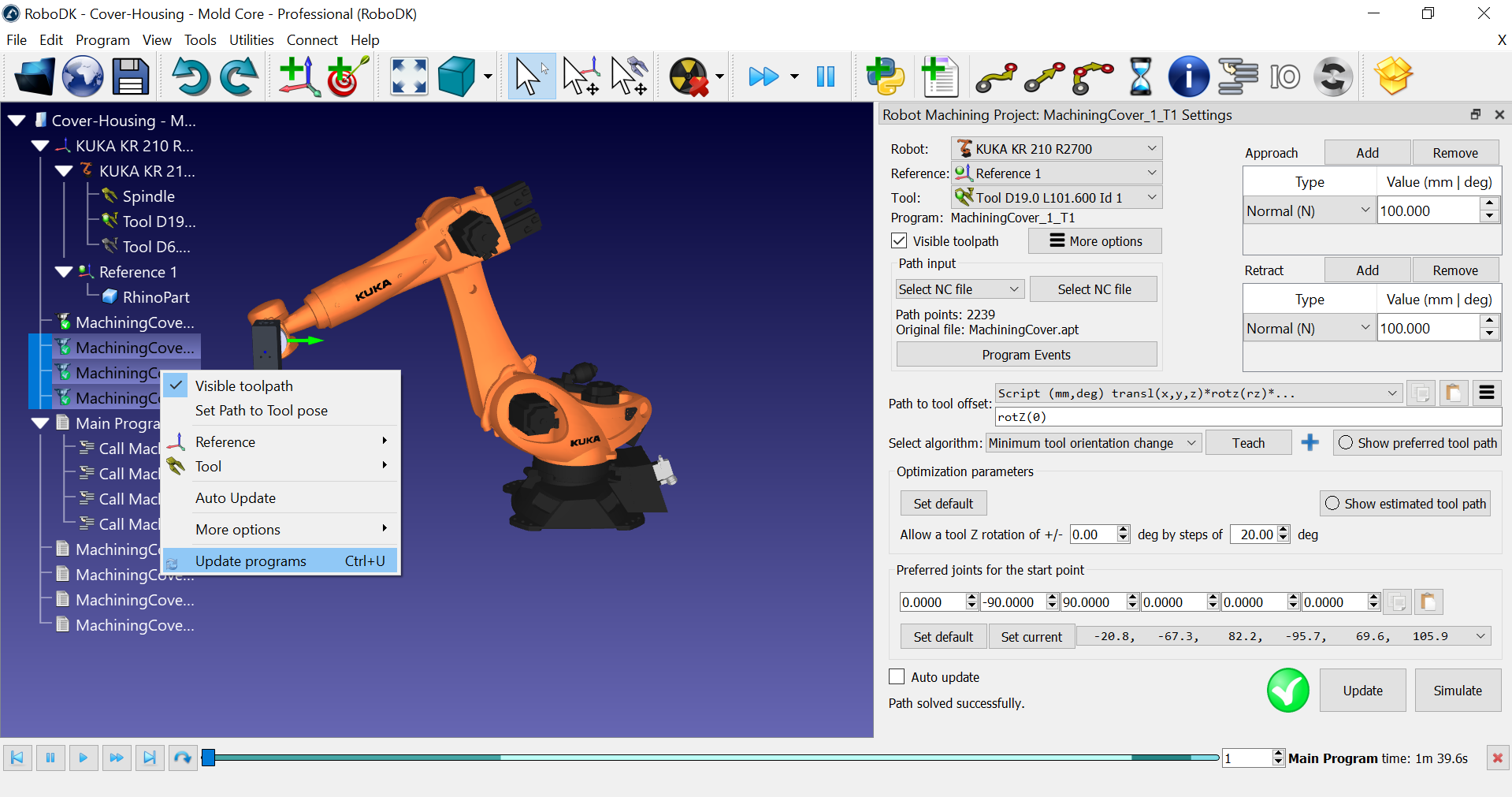
1.Sélectionnez une ou plusieurs opérations d'usinage robotisé (en maintenant la touche Shift enfoncée, vous pouvez générer plusieurs éléments dans l'arbre).
2.Cliquez avec le bouton droit de la souris sur le(s) élément(s) sélectionné(s).
3.Sélectionnez Mettre à jour les programmes.
Lorsque RoboDK calcule le parcours d'usinage du robot, il crée un nouveau programme de robot pour chaque opération d'usinage. Les icônes blanches représentent les programmes de robot. Ces programmes sont créés automatiquement par RoboDK. Vous pouvez simuler chaque programme individuellement en double-cliquant dessus dans l'arbre.
RoboDK crée également automatiquement un programme principal que vous pouvez exécuter pour simuler toutes les opérations d'usinage du robot dans l'ordre.
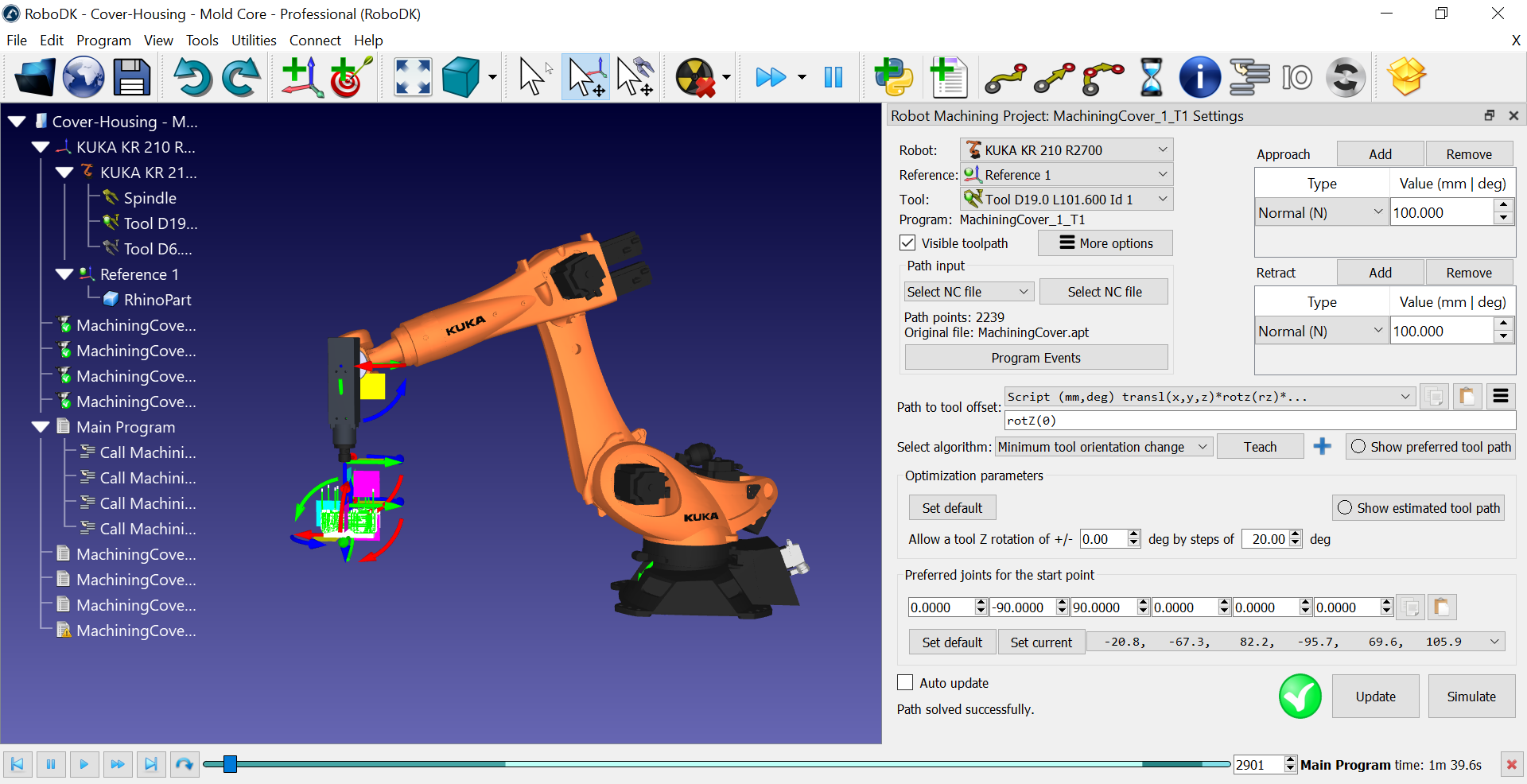
Simulez l'opération d'usinage du robot
Vous pouvez double-cliquer sur le programme principal pour simuler l'ensemble de l'opération d'usinage du robot. Vous pouvez également double-cliquer sur n'importe quel sous-programme pour le simuler.
Personnaliser l'orientation de l'outil
La plupart des opérations d'usinage ou de fabrication impliquent une contrainte à 5 axes. Alors que la position de l'outil (CDO) et l'axe de coupe sont définis, vous disposez d'un degré de liberté supplémentaire à définir lorsque vous utilisez un bras robotisé à 6 axes. Ce degré de liberté vous permet de tourner autour de l'axe de coupe et d'éviter automatiquement les singularités et les limites d'axe.
La manière la plus simple de personnaliser l'orientation de l'outil consiste à sélectionner le bouton Apprendre dans le projet d'usinage du robot. En sélectionnant Apprentissage, vous indiquez à RoboDK que vous souhaitez suivre l'orientation actuelle de l'outil et que les paramètres s'adapteront à cette orientation.
En sélectionnant le parcours d'outil préféré de Show, nous pouvons prévisualiser l'orientation de l'outil que le robot tente de suivre.
Vous pouvez sélectionner Mettre à jour et Simuler pour voir le résultat.
Les paramètres d'optimisation permettent au robot de modifier automatiquement l'orientation de l'outil s'il ne parvient pas à obtenir l'orientation souhaitée. Ce paramètre est important si vous avez une grande pièce, si vous travaillez près d'une singularité ou près des limites de l'espace de travail du robot. Si vous voyez une marque rouge, cela signifie que le robot ne peut pas effectuer l'opération.
Si vous sélectionnez Afficher le parcours estimé de l'outil, vous devriez voir en vert les positions qui peuvent être atteintes. Cela vous donnera une idée de l'orientation à adopter pour que le parcours soit réalisable. Cela signifie que nous utilisons le degré de liberté supplémentaire pour éviter automatiquement les singularités du robot et les limites des axes.
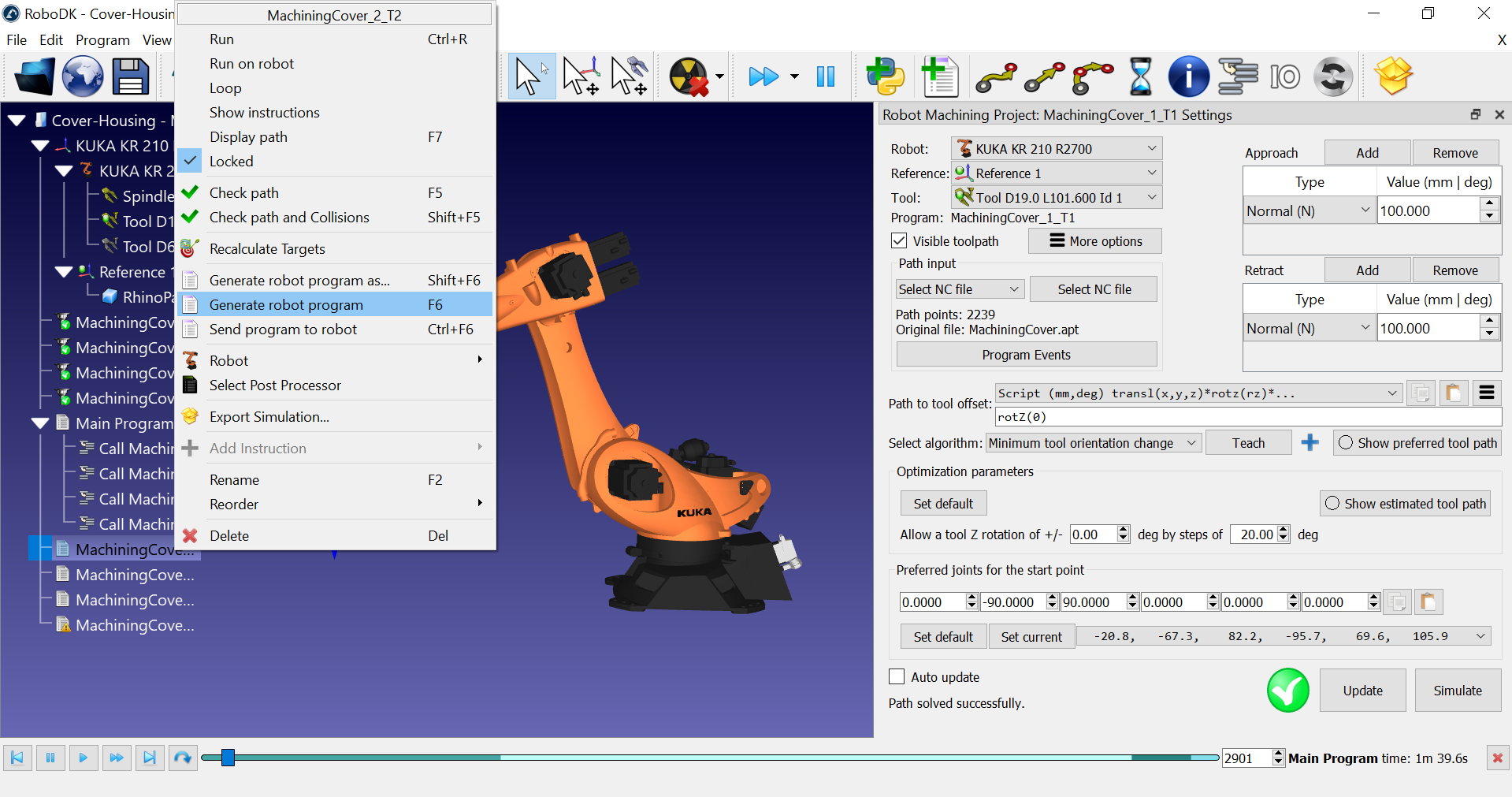
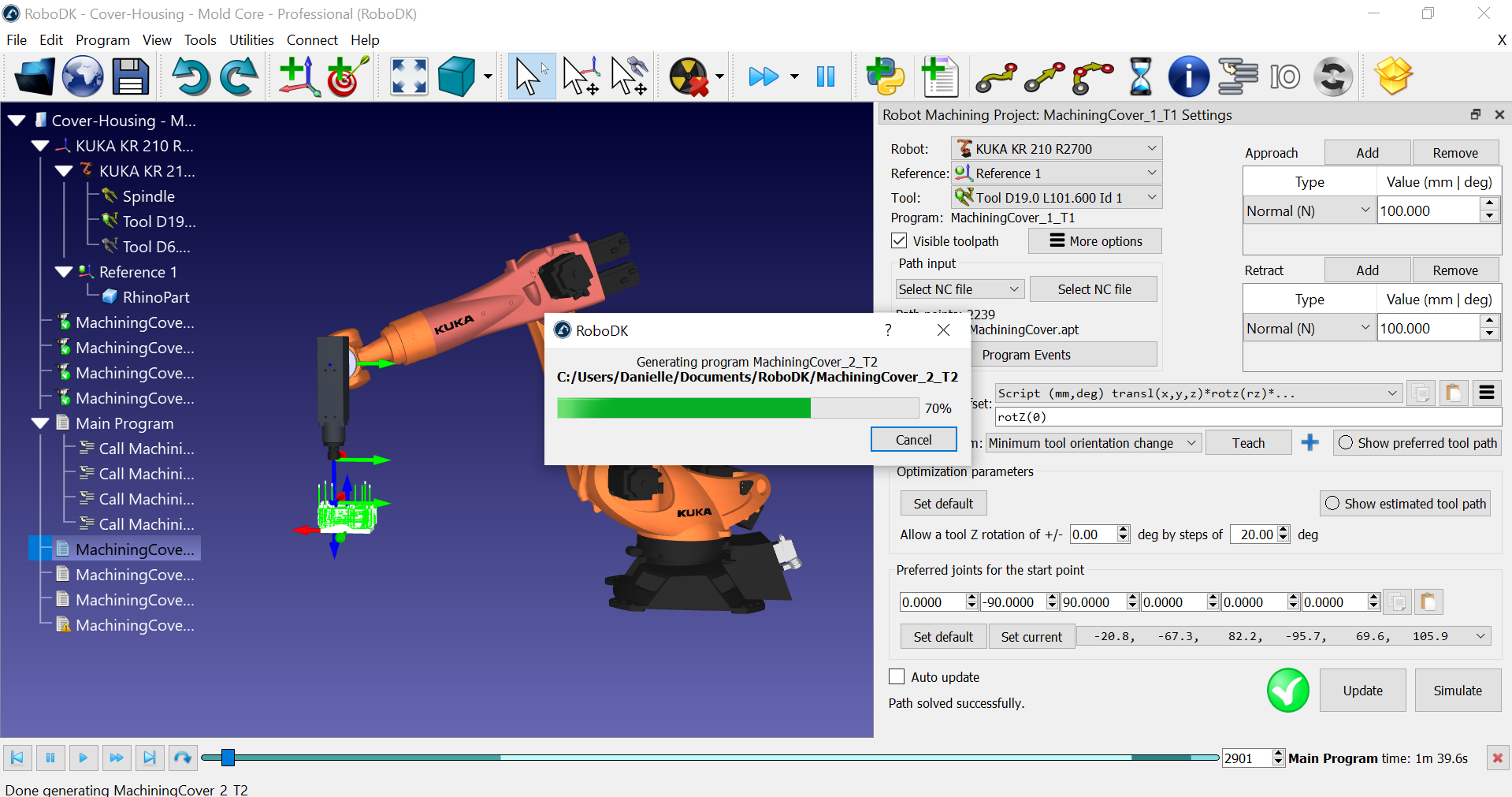
Générer les programmes du robot
Vous pouvez cliquer avec le bouton droit de la souris sur un ou plusieurs programmes et sélectionner Générer les programmes du robot pour générer ou mettre à jour les programmes du robot (fichiers) pour votre système de commande du robot.
Dans cet exemple, si nous utilisons un contrôleur de robot KUKA KRC, nous obtiendrons des fichiers de programme SRC.
Vous devriez voir la référence et l'outil définis dans le programme de la même manière que vous les avez définis dans RoboDK.
Vous pouvez également utiliser des références numérotées et des noms d'outils pour utiliser les valeurs stockées dans le contrôleur en fonction de leur ID.
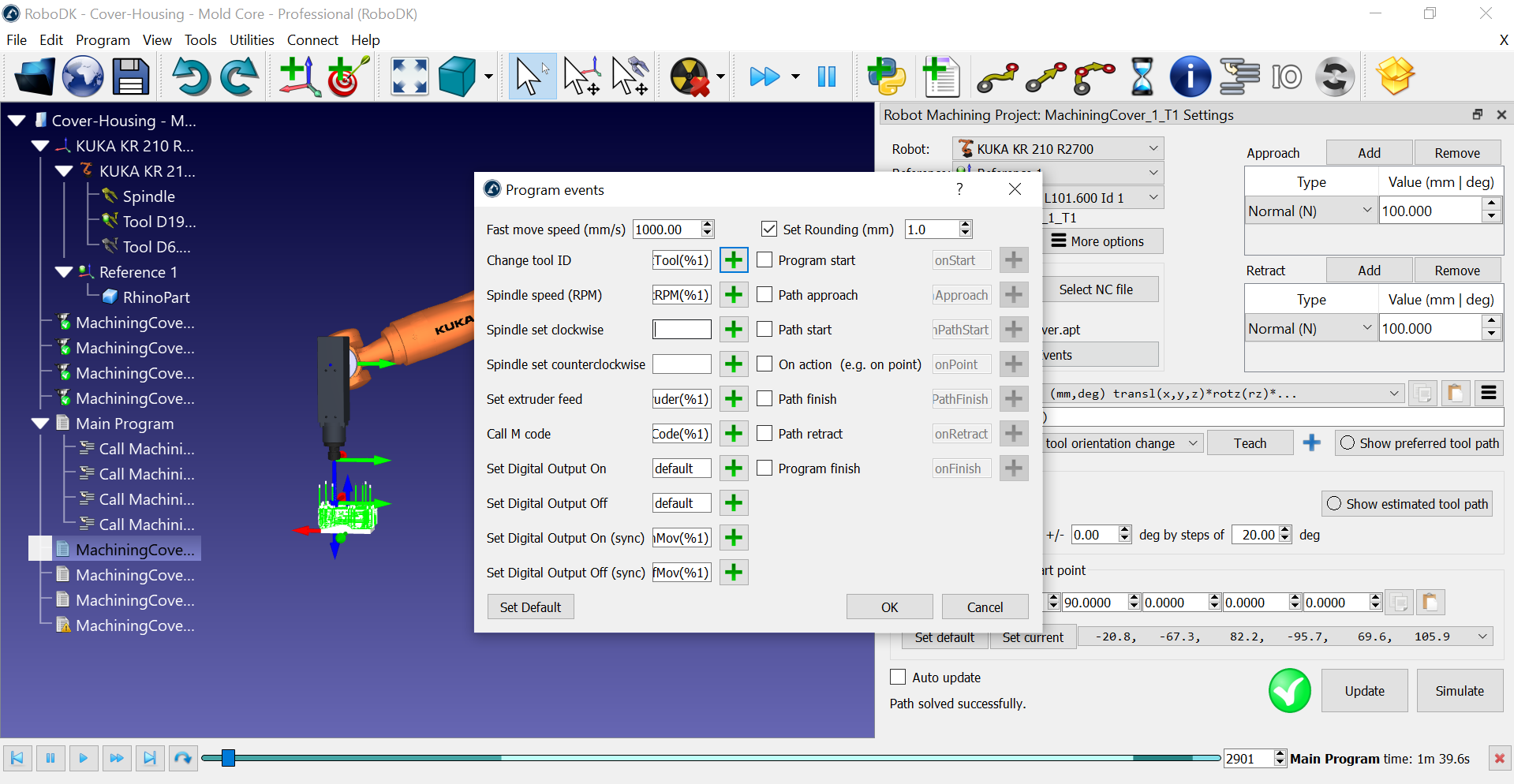
Vous pouvez voir des appels de programme personnalisés pour sélectionner l'outil correct en fonction de votre ID d'outil et activer la broche. Ces paramètres peuvent être personnalisés dans le menu Événements du programme. Vous pouvez déclencher une procédure spéciale sur votre contrôleur de robot lorsqu'une certaine commande d'usinage doit être exécutée, comme le changement d'outil, la vitesse de la broche ou l'exécution de codes M.
Changez le post-processeur
Chaque robot est associé à un post-processeur par défaut qui doit générer un code valide pour votre contrôleur de robot. Vous pouvez facilement modifier la sortie du programme en fonction du contrôleur de robot que vous utilisez.
Procédez comme suit pour modifier le postprocesseur :
1.Cliquez avec le bouton droit de la souris sur un programme ou un robot.
2.Sélectionnez Sélectionner le processeur de post-production pour changer le processeur de post-production.
Ce paramètre s'applique à tous les programmes utilisant le même robot.
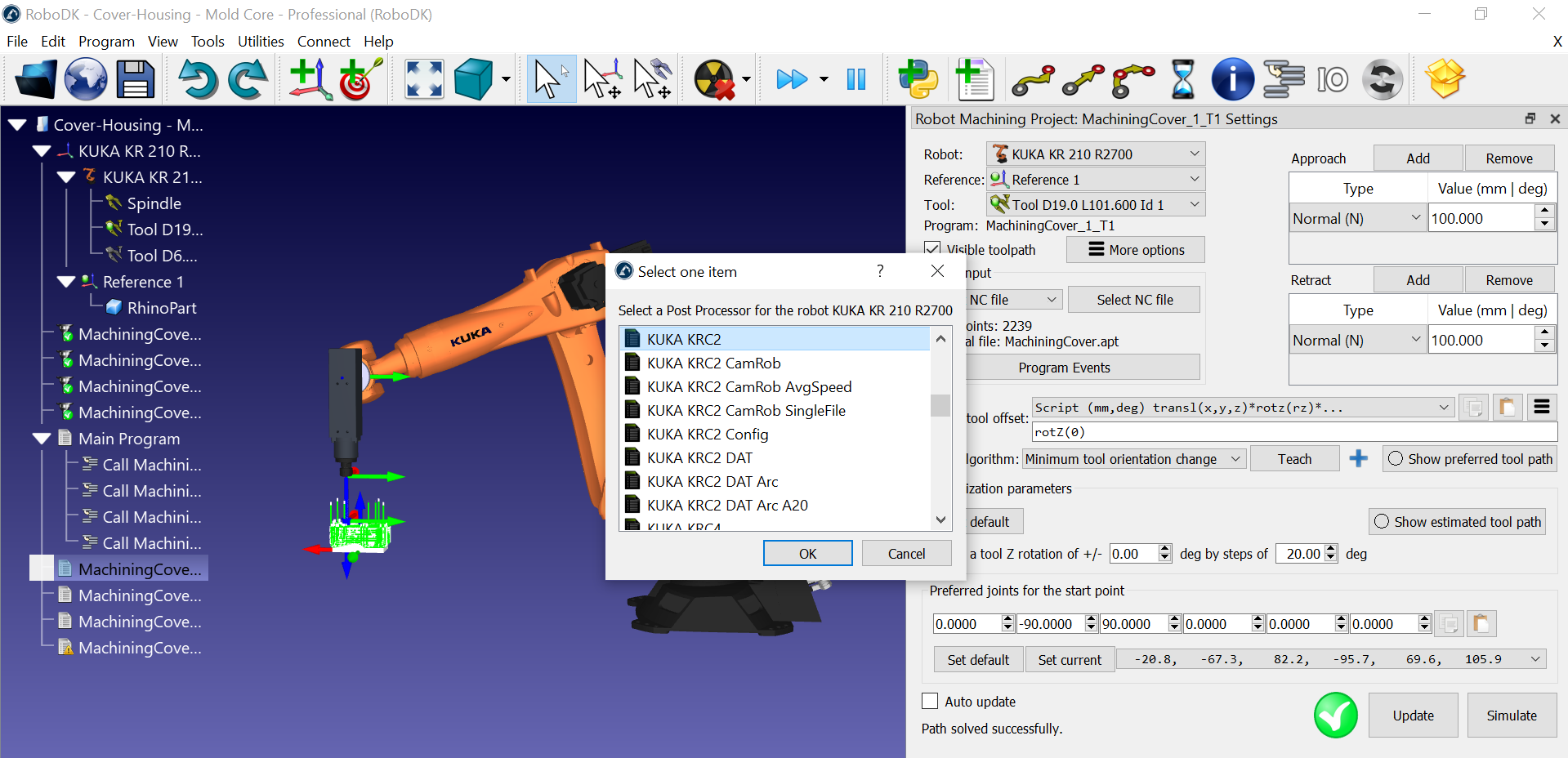
Si vous avez un robot KUKA, vous devriez voir le post-processeur KUKA KRC2 sélectionné par défaut. Ceci devrait être compatible avec les contrôleurs KUKA KRC4. Si vous préférez, vous pouvez toujours sélectionner le post processeur KUKA KRC4 si vous avez un contrôleur KRC4.