Découpe de robots en RoboDK
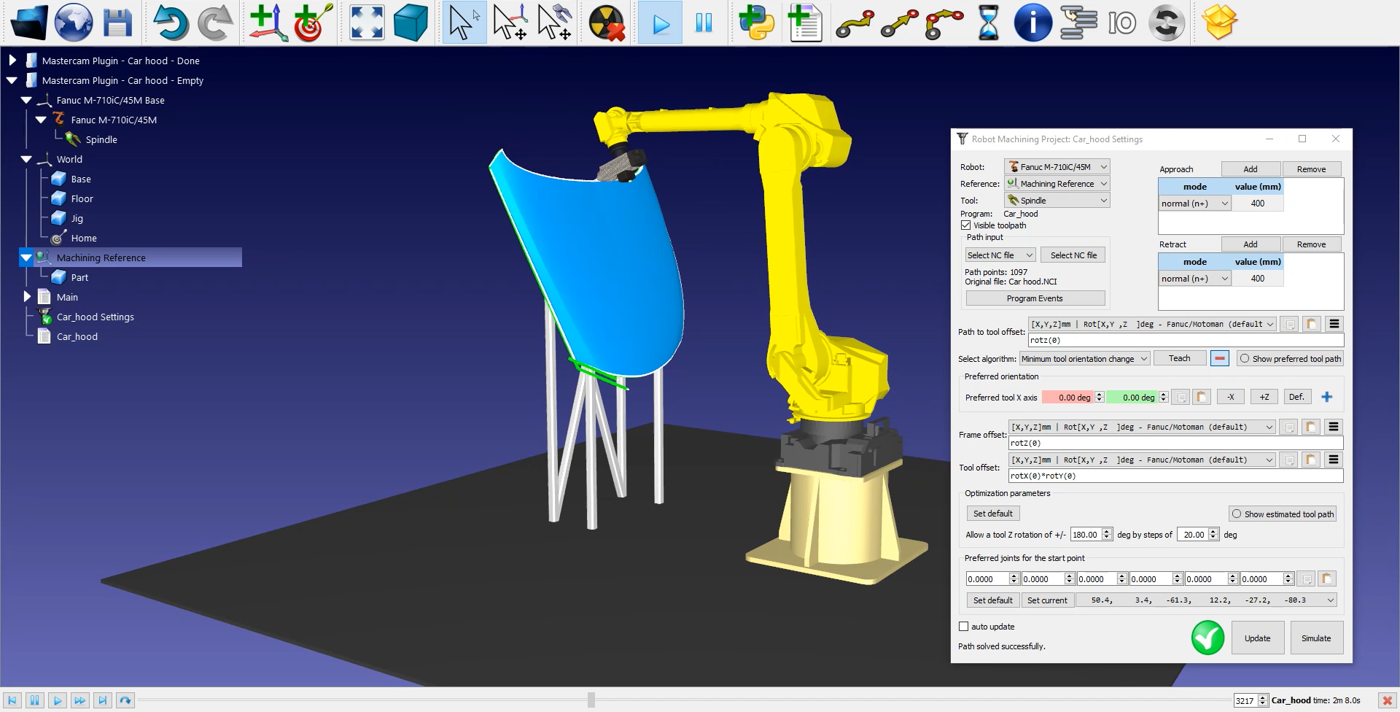
Une fois que le parcours de découpe du robot a été importé dans RoboDK, vous devriez voir le parcours de découpe attaché à la référence du moule de votre station RoboDK. Dans les paramètres du capot de la voiture
Vous pouvez également régler la valeur des mouvements d'approche et de rétraction avant et après le parcours de coupe. Dans cet exemple, une approche/rétraction de 400 mm devrait être sûre. Ces mouvements sont maintenant 4 fois plus longs que les mouvements d'approche et de rétraction par défaut et permettront d'éviter toute collision avec la pièce.
Vous pouvez également régler l'orientation de la pièce dans la partie inférieure du menu.
L'étape suivante consiste à vérifier si l'ordre dans lequel les sections du parcours seront exécutées est correct en sélectionnant

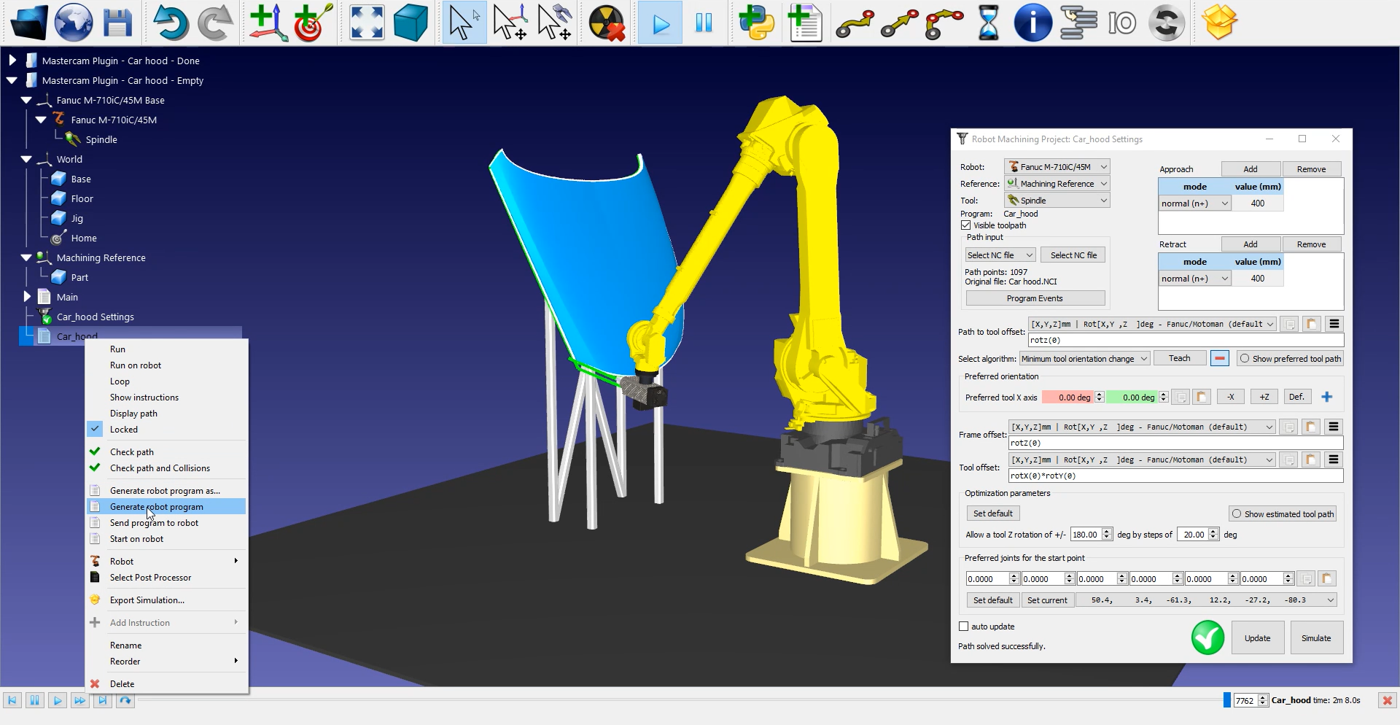
Pour générer le programme de votre robot, assurez-vous d'utiliser le bon post-processeur. Double-cliquez sur le robot
Enfin, faites un clic droit sur
Les fichiers Fanuc LS et/ou TP sont maintenant prêts à être transférés vers le contrôleur de votre robot.