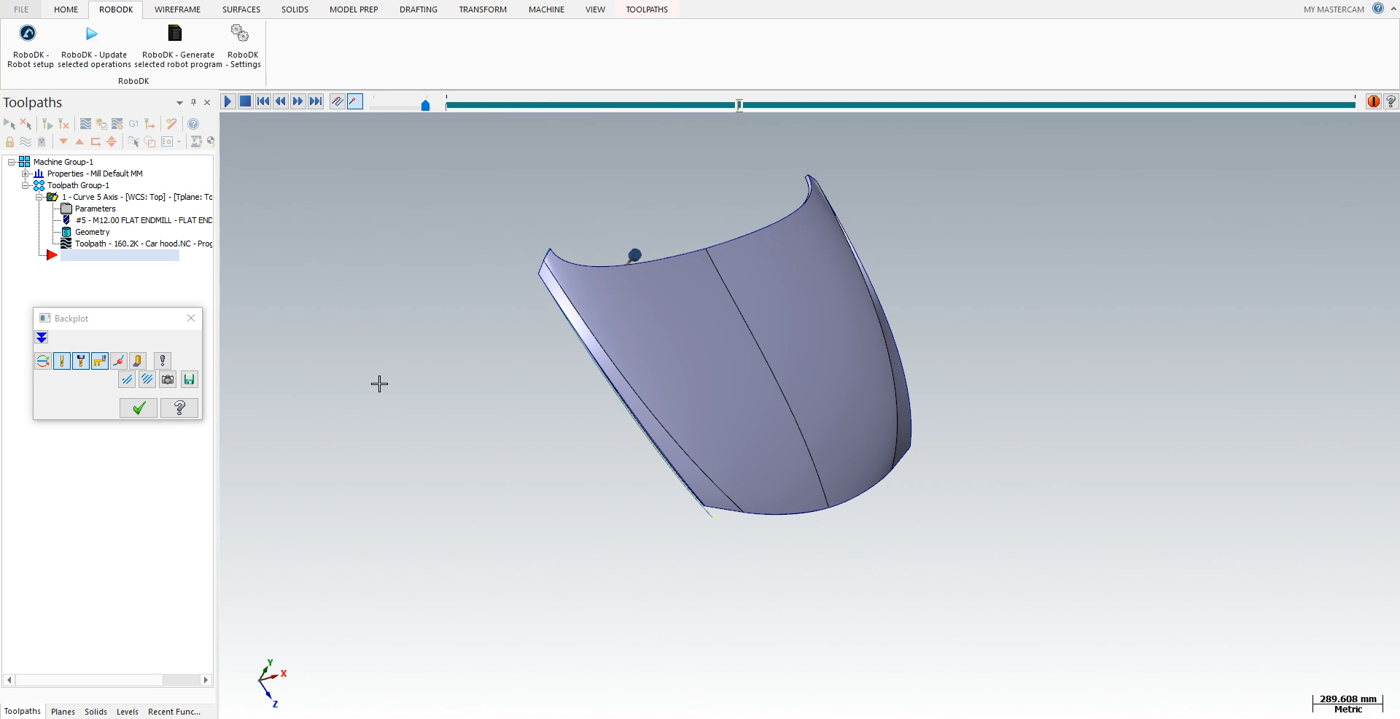
Parcours de coupe dans Mastercam
Ouvrez votre objet 3D dans Mastercam et lancez la simulation de découpe. Vous pouvez voir que le logiciel a ajusté l'orientation de l'outil pour qu'il corresponde à la surface de coupe
Suivez les étapes suivantes pour charger votre pièce dans RoboDK :
1.Sélectionnez l'onglet RoboDK et choisissez RoboDK - Robot setup.
2.Sélectionnez Load Part.
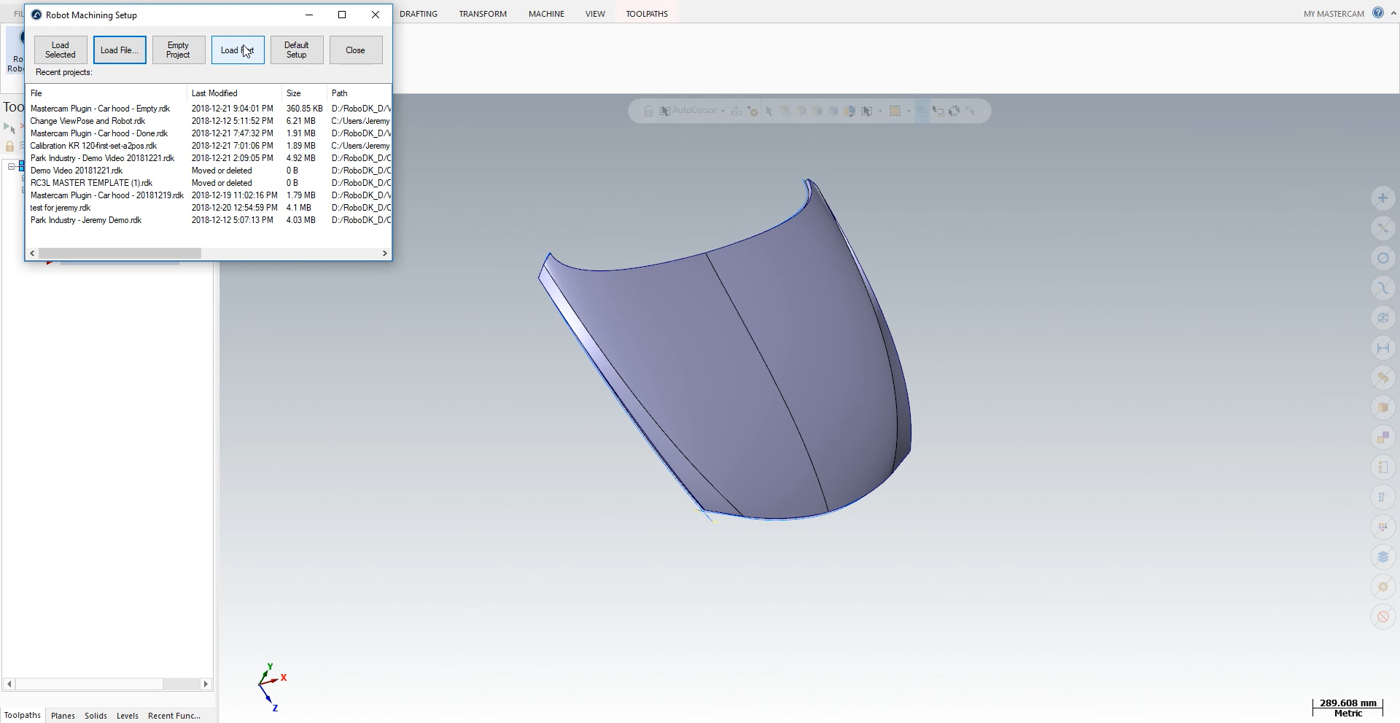
Vous devez voir la pièce chargée sur le système de coordonnées actif (Référence d'usinage) sur le gabarit de la station RoboDK.
Note : pour importer votre pièce à la bonne position, vous devez configurer la référence d'usinage à une position spécifique. Cliquez avec le bouton droit de la souris sur la référence d'usinage➔ Visible pour faire apparaître le système de coordonnées. Définissez l'origine à cette position exacte dans Mastercam lors de la création de votre pièce. Lorsque vous importez la pièce, RoboDK fait correspondre l'origine de la pièce avec l'origine de la référence d'usinage.
L'étape suivante consiste à importer le parcours de coupe de Mastercam vers RoboDK.
1.Sélectionnez l'onglet RoboDK dans Mastercam.
2.Sélectionnez RoboDK - Mettez à jour les opérations sélectionnées.
3.Allez dans RoboDK.