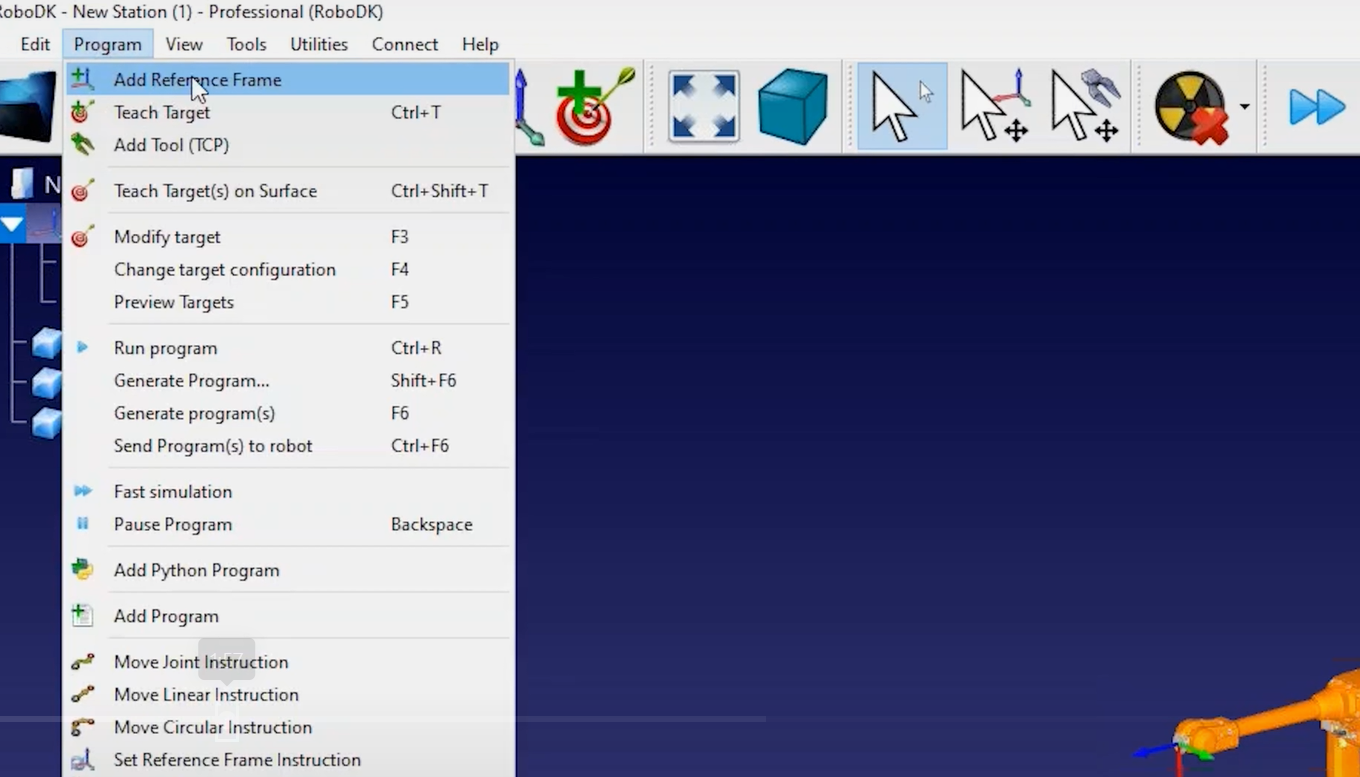
Créez le système de coordonnées d'usinage du robot
Vous pouvez créer un nouveau système de coordonnées pour votre montage d'usinage robotisé en sélectionnant le menu Programme, puis Ajouter un système de coordonnées.
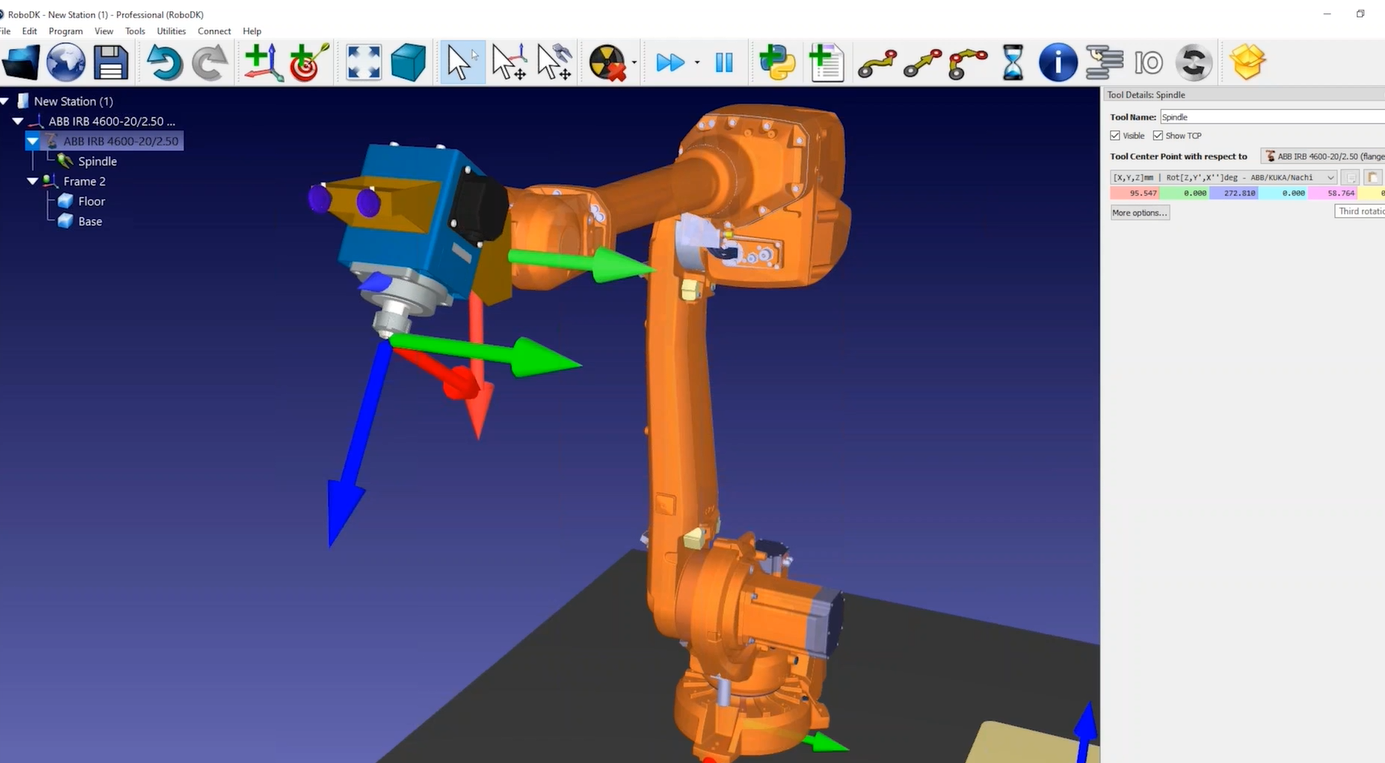
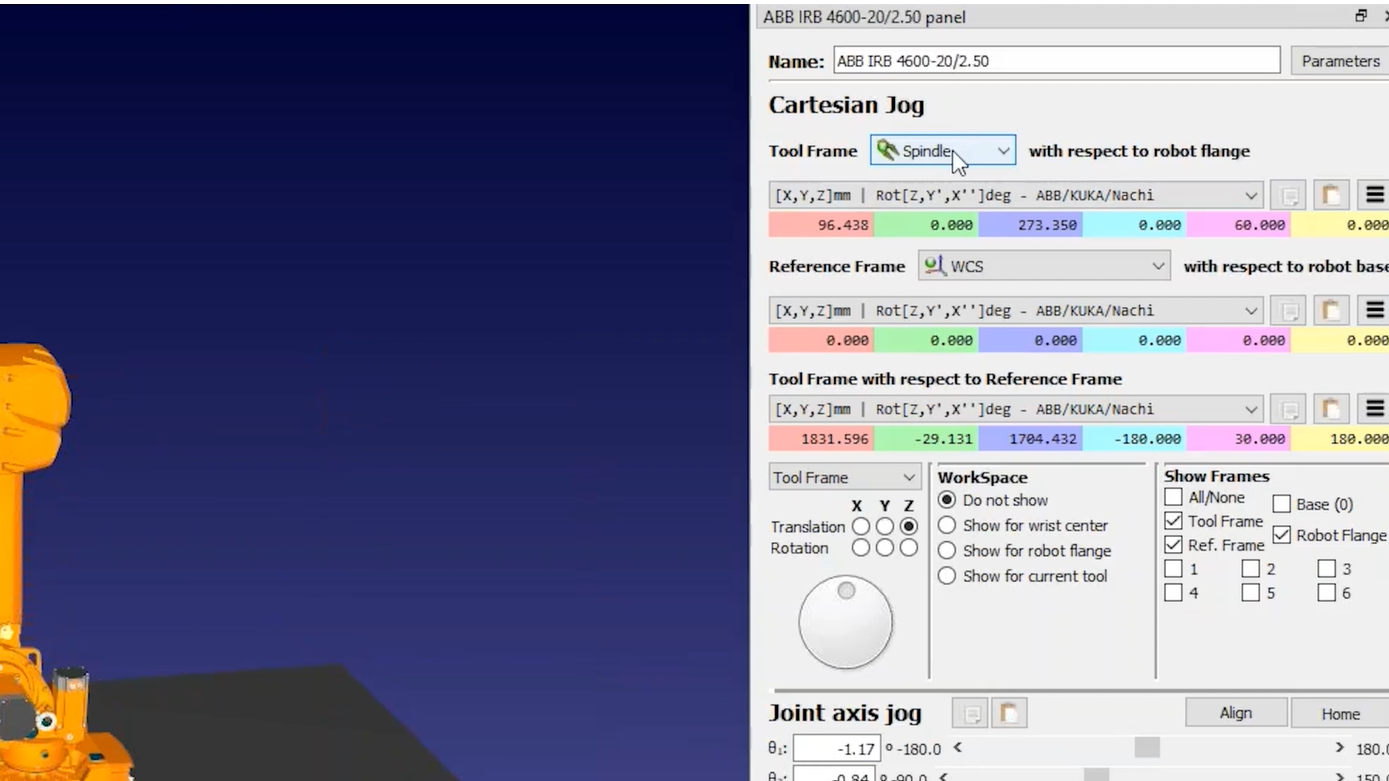
Suivez les étapes suivantes pour définir correctement l'outil (CDO) :
1.Vous pouvez saisir les coordonnées de l'outil si vous les avez (vous pouvez choisir parmi différents formats d'orientation spécifiques au fournisseur pour saisir la position de l'outil).
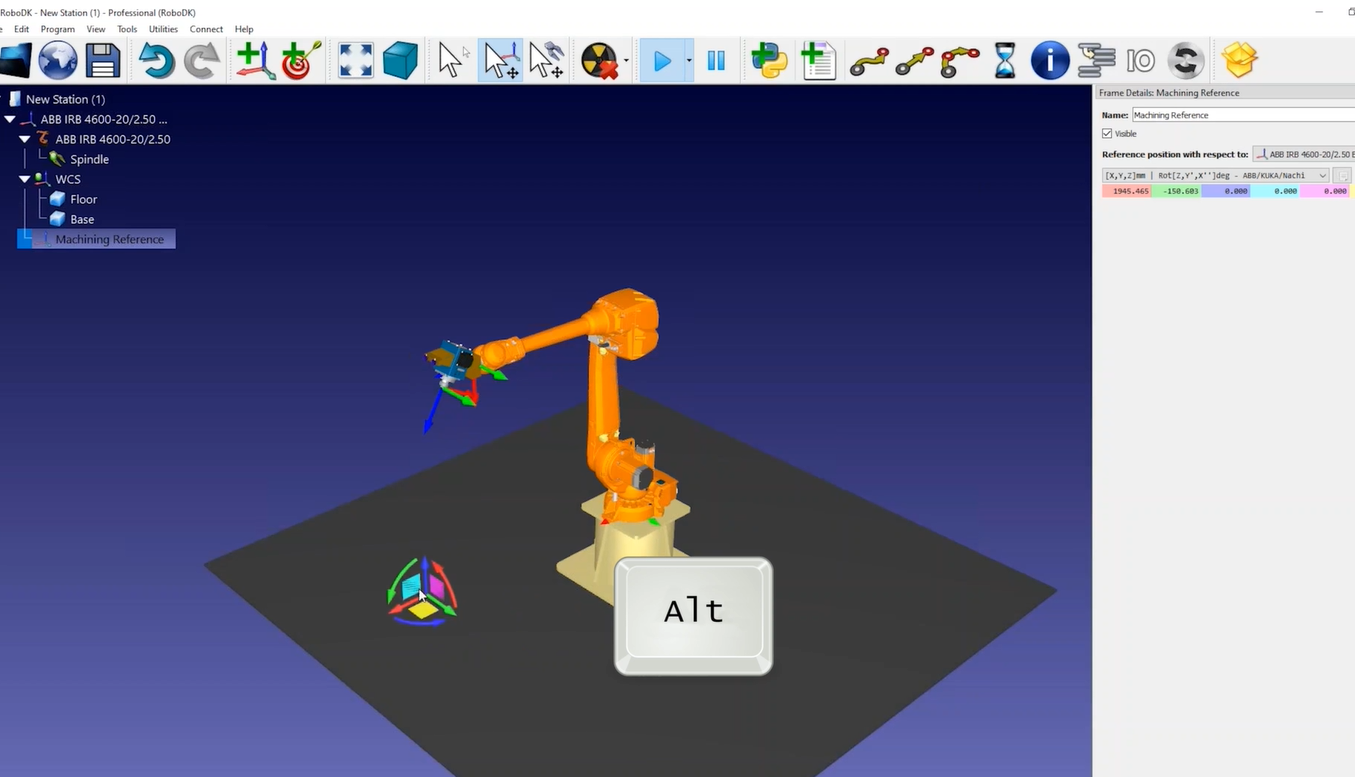
2.En maintenant la touche ALT enfoncée, vous pouvez déplacer le robot ou n'importe quel système de coordonnées.
3.En maintenant les touches ALT et Shift enfoncées, vous pouvez modifier la position et l'orientation de votre CDO.
Procédez comme suit pour ajouter un autre système de coordonnées représentant la référence d'usinage :
4.Sélectionnez le menu Programme, puis Ajouter un système de coordonnées.
5.Vous pouvez renommer les éléments de l'arbre en appuyant sur la touche F2 ou en cliquant avec le bouton droit de la souris et en sélectionnant Renommer.
6.En maintenant la touche ALT enfoncée, vous pouvez déplacer le système de coordonnées où vous le souhaitez si vous avez la possibilité de choisir l'endroit où vous placerez la pièce
7.Vous pouvez double-cliquer sur le robot pour voir quel outil et quel système de coordonnées vous utilisez. Pour une position donnée du robot, les valeurs affichées dans le panneau du robot doivent correspondre aux valeurs affichées dans le système de commande du robot.
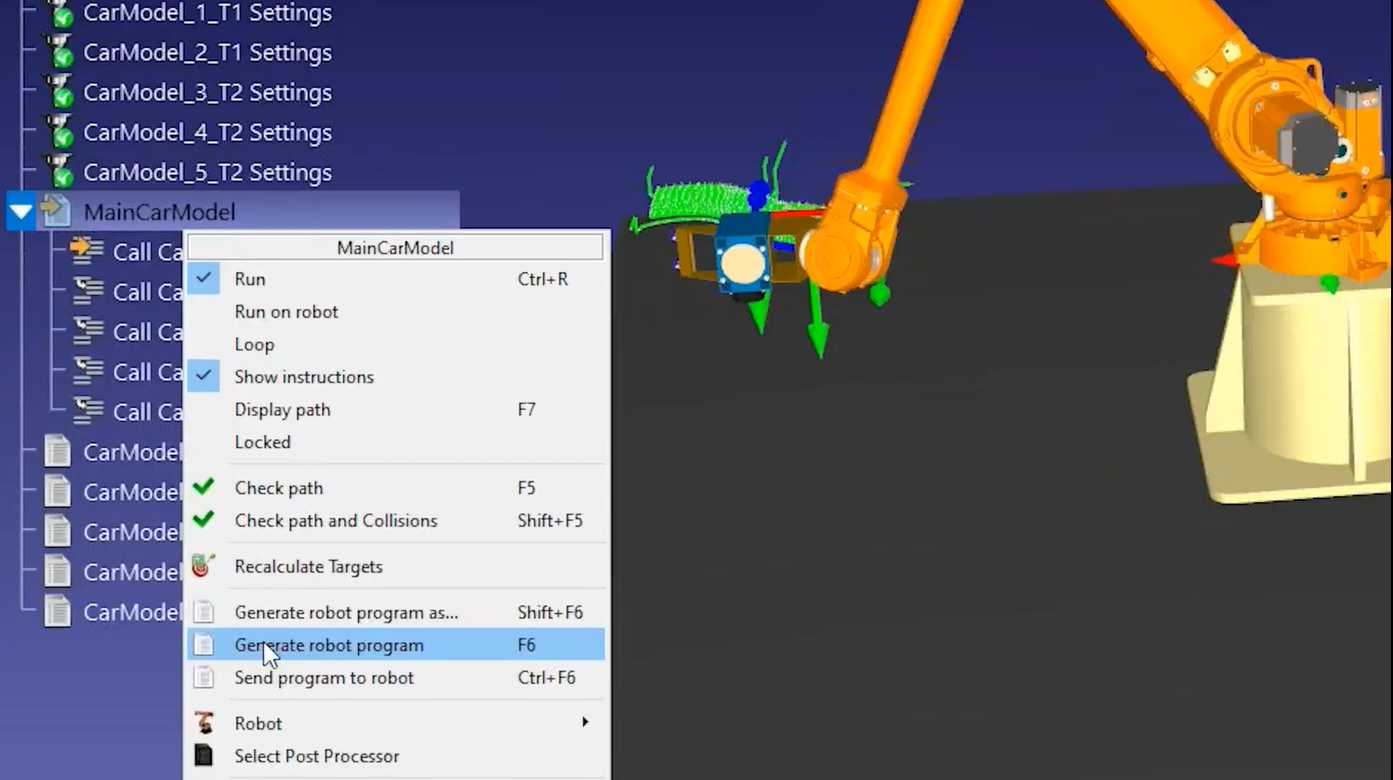
Procédez comme suit pour enregistrer votre cellule robotisée :
8.Une fois que vous avez construit votre cellule robotique, vous pouvez l'enregistrer dans un fichier RDK en sélectionnant Fichier➔ Enregistrer la station. Vous enregistrerez ainsi tous les paramètres, y compris les modèles 3D, dans un seul fichier.
9.Chargez le fichier de travail d'usinage dans RoboDK et RoboDK devrait créer automatiquement un projet d'usinage du robot pour chaque opération d'usinage.
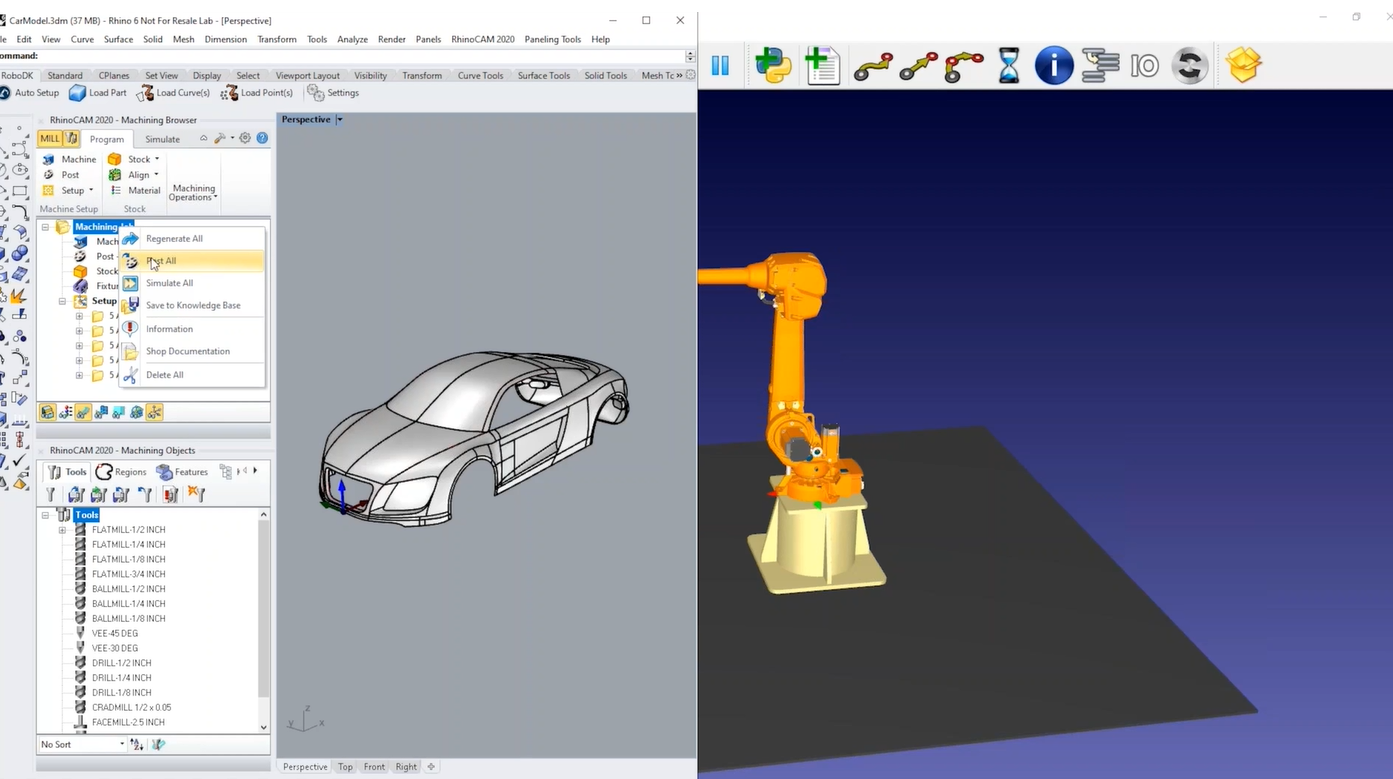
10.Vous pouvez sélectionner Mettre à jour pour voir si RoboDK peut trouver un parcours réalisable en utilisant les paramètres par défaut. Vous pouvez également mettre à jour toutes les opérations en bloc.
11.Une fois que vous avez une simulation valide dans RoboDK, vous pouvez faire un clic droit sur votre programme et sélectionner Générer un programme. Cela générera les fichiers requis par le contrôleur de votre robot.