Personnaliser l'orientation de l'outil
Vous pouvez facilement personnaliser l'orientation de l'outil dans votre programme d'usinage robotisé en enseignant l'orientation préférée.
Dans cet exemple, nous pourrions améliorer l'orientation de l'outil pour les deux dernières opérations d'usinage :
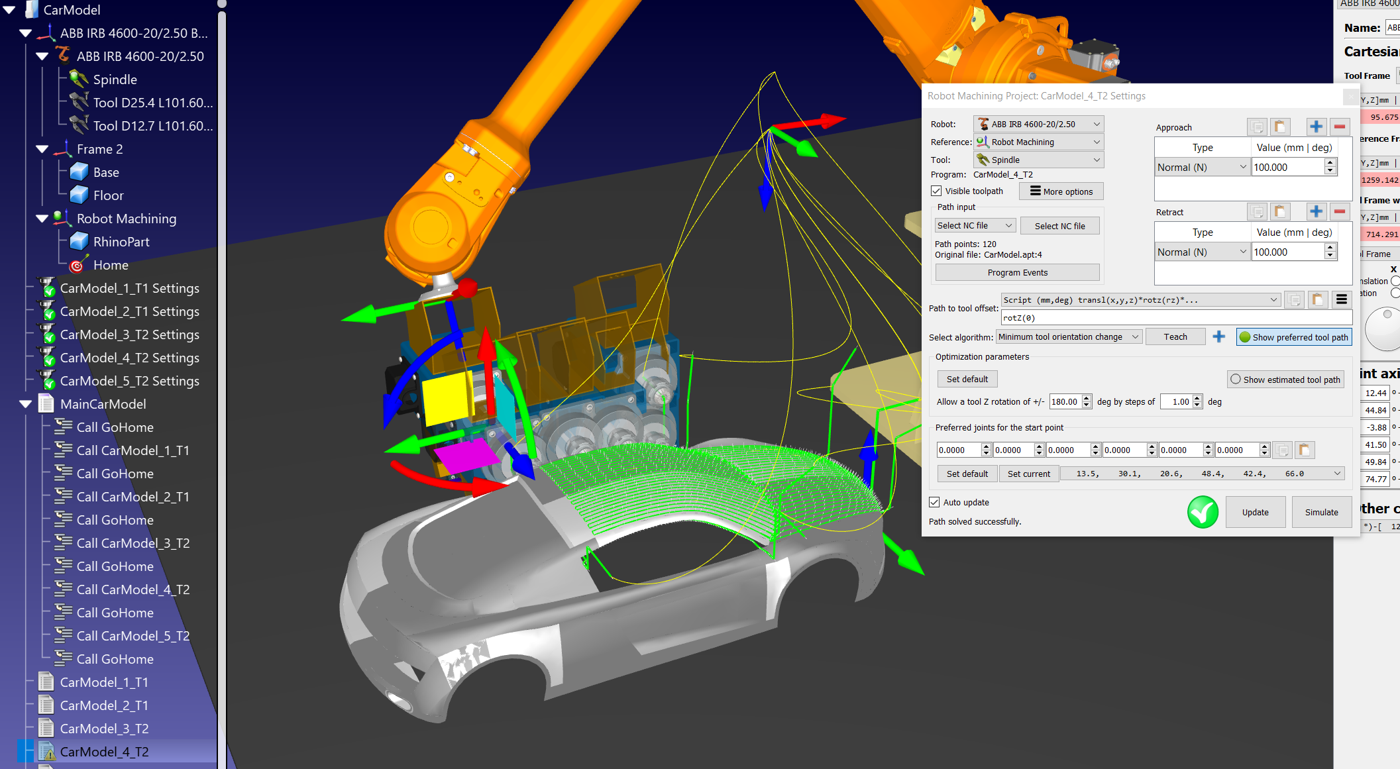
1.Double-cliquez sur la 4e opération d'usinage pour ouvrir les paramètres d'usinage du robot pour cette opération.
2.Sélectionnez Simuler ou exécutez le programme correspondant et arrêtez le robot en un point du parcours d'usinage.
3.Sélectionnez le bouton Afficher le parcours d'outil préféré pour voir l'orientation de l'outil que RoboDK essaiera de faire suivre au robot.
4.Maintenez la touche Alt enfoncée pour saisir l'outil du robot et saisissez la flèche ronde bleue qui tourne autour de l'axe Z de l'outil. Déplacez l'orientation de l'outil vers une orientation que vous souhaitez suivre.
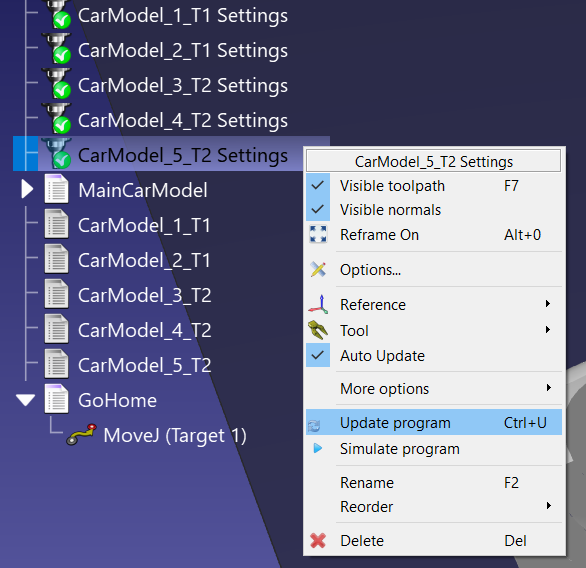
5.Sélectionnez Apprendre dans le menu d'usinage du robot pour tenir compte de cette orientation tout au long du parcours. En sélectionnant Apprendre, vous indiquez à RoboDK que vous souhaitez suivre l'orientation actuelle de l'outil et que les paramètres s'adapteront à cette orientation.
6.Sélectionnez Mettre à jour pour recalculer le parcours.
Sélectionnez Simuler pour exécuter la simulation (ou double-cliquez sur le programme généré).
7.Si le résultat correspond à vos attentes, vous pouvez copier les paramètres et les coller dans un autre parcours d'outils : Cliquez avec le bouton droit de la souris sur les paramètres d'usinage du robot et sélectionnez Copier les paramètres. Ensuite, cliquez avec le bouton droit de la souris sur les nouveaux paramètres d'usinage du robot et sélectionnez Coller les paramètres. Cliquez à nouveau avec le bouton droit de la souris sur ce dernier projet d'usinage robotisé et sélectionnez Mettre à jour le programme pour mettre à jour le programme associé à ce travail d'usinage robotisé.