Transitions sûres entre les tâches d'usinage robotisé
Pour sécuriser la transition entre les tâches d'usinage de votre robot, vous pouvez faire en sorte que le robot se mette en position d'approche après chaque opération d'usinage.
Suivez les étapes suivantes pour créer un nouveau programme appelé GoHome et vous déplacer vers cet emplacement une fois que chaque travail d'usinage est terminé :
1.Créez un nouveau programme en sélectionnant Programme➔ Add-in ou sélectionnez le bouton correspondant dans la barre d'outils.
2.Renommez le programme en appuyant sur F2 en quelque chose comme GoHome.
3.Sélectionnez le programme que vous venez de créer.
4.Déplacez le robot vers un emplacement sûr et sélectionnez Programme➔ Move Joint Instruction ou sélectionnez le bouton correspondant dans la barre d'outils. Cette opération doit créer une nouvelle position à cet emplacement et ajouter une instruction de déplacement des articulations à cette position si le programme a été sélectionné précédemment.
5.Vous pouvez ensuite faire en sorte que le robot se déplace vers cette cible d'origine entre chaque opération d'usinage en cliquant avec le bouton droit de la souris sur la première instruction d'appel de programme et en sélectionnant Add-in➔ Instruction d'appel de programme.
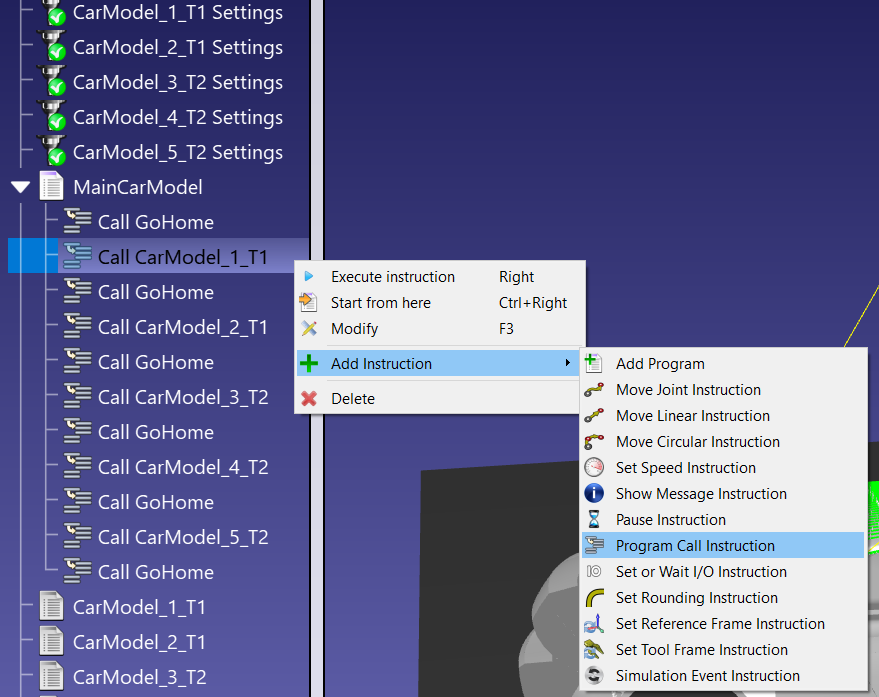
6.Saisissez le nom du programme auquel vous souhaitez accéder (GoHome) et sélectionnez OK.
7.Vous pouvez ensuite copier/coller cette instruction dans votre programme pour obtenir rapidement le résultat final.
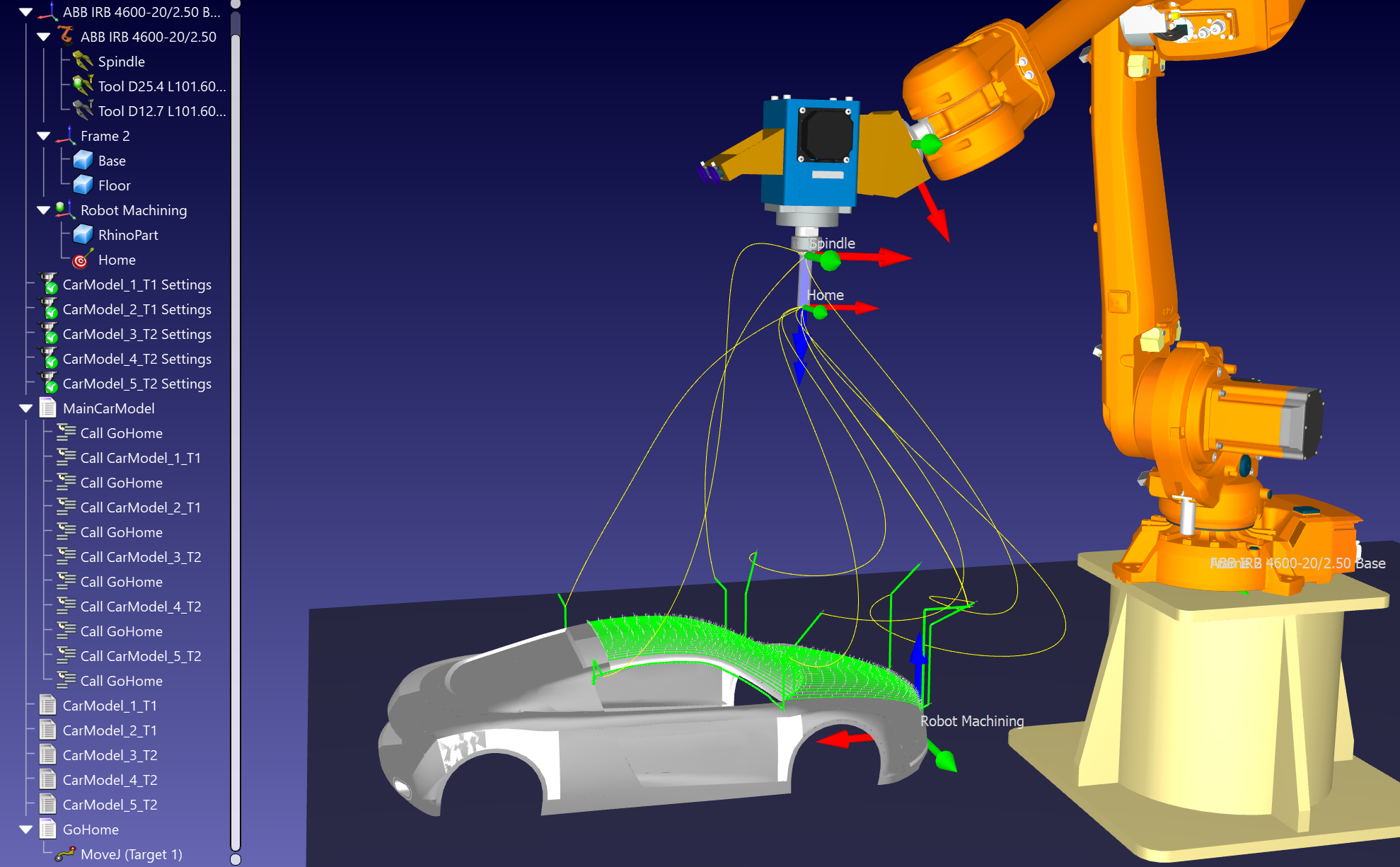
8.Cliquez avec le bouton droit de la souris sur le programme principal et sélectionnez Afficher le parcours pour voir le parcours du robot sous la forme d'une ligne jaune. Cela vous aidera à visualiser si la position de votre cible d'approche est adaptée à votre projet.