Station RoboDK
L'étape suivante consiste à vérifier si l'ordre dans lequel les sections du parcours seront exécutées est correct en sélectionnant
Si vous souhaitez réorganiser ou changer le sens d'une section de parcours, procédez comme suit :
1.Corrigez l'ordre des sections du parcours en cliquant sur
2.Cliquez avec le bouton droit de la souris sur une section vide de la station et réinitialisez la sélection
3.Allez au point de départ de votre parcours et sélectionnez le premier tronçon. Assurez-vous qu'il est orienté dans la bonne direction en cliquant dessus avec le bouton droit de la souris et appuyez sur "Switch sense" si nécessaire.
4.Sélectionnez Sélection automatique de la courbe suivante ou Sélection automatique de tous pour sélectionner automatiquement chaque section du parcours dans le bon ordre.
5.Sélectionnez Done. Cela vous ramènera à la fenêtre de paramétrage de RoboDK.
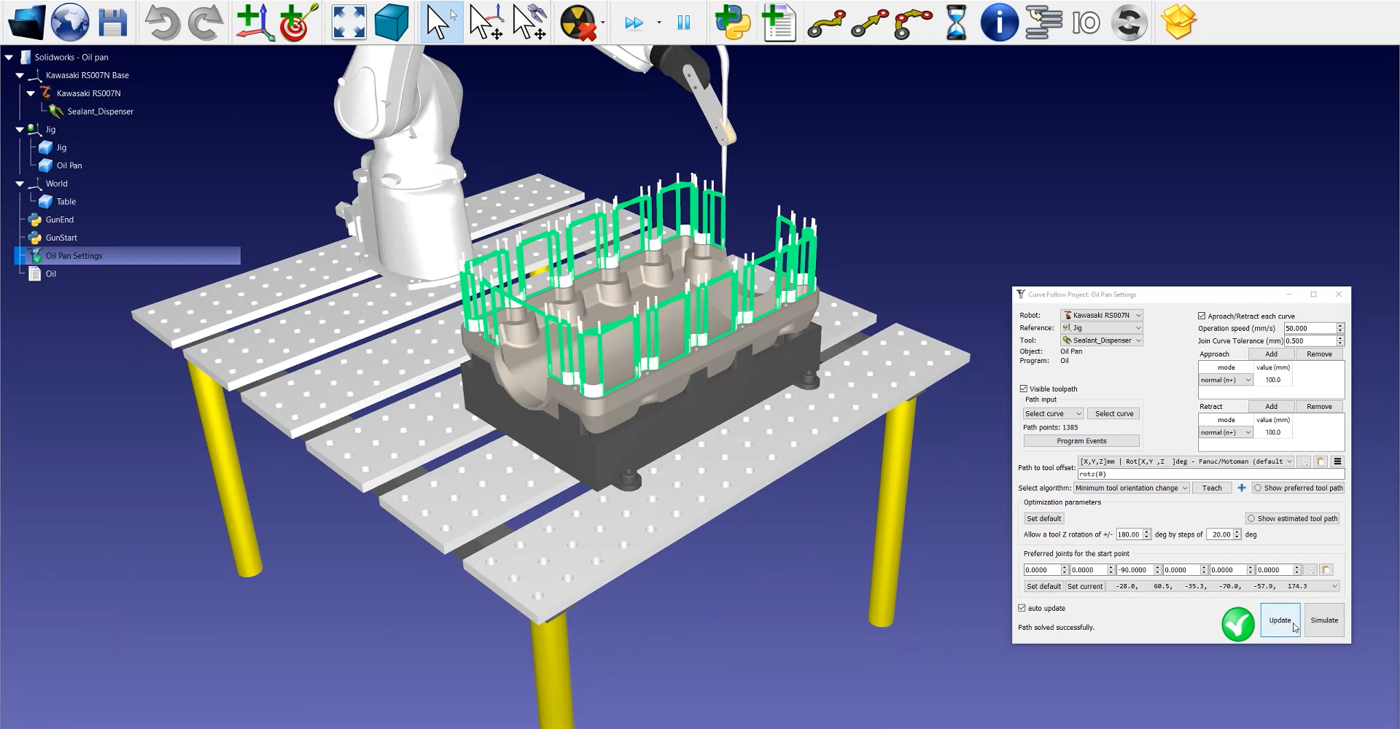
Vous devez ensuite ajuster l'orientation de l'outil :
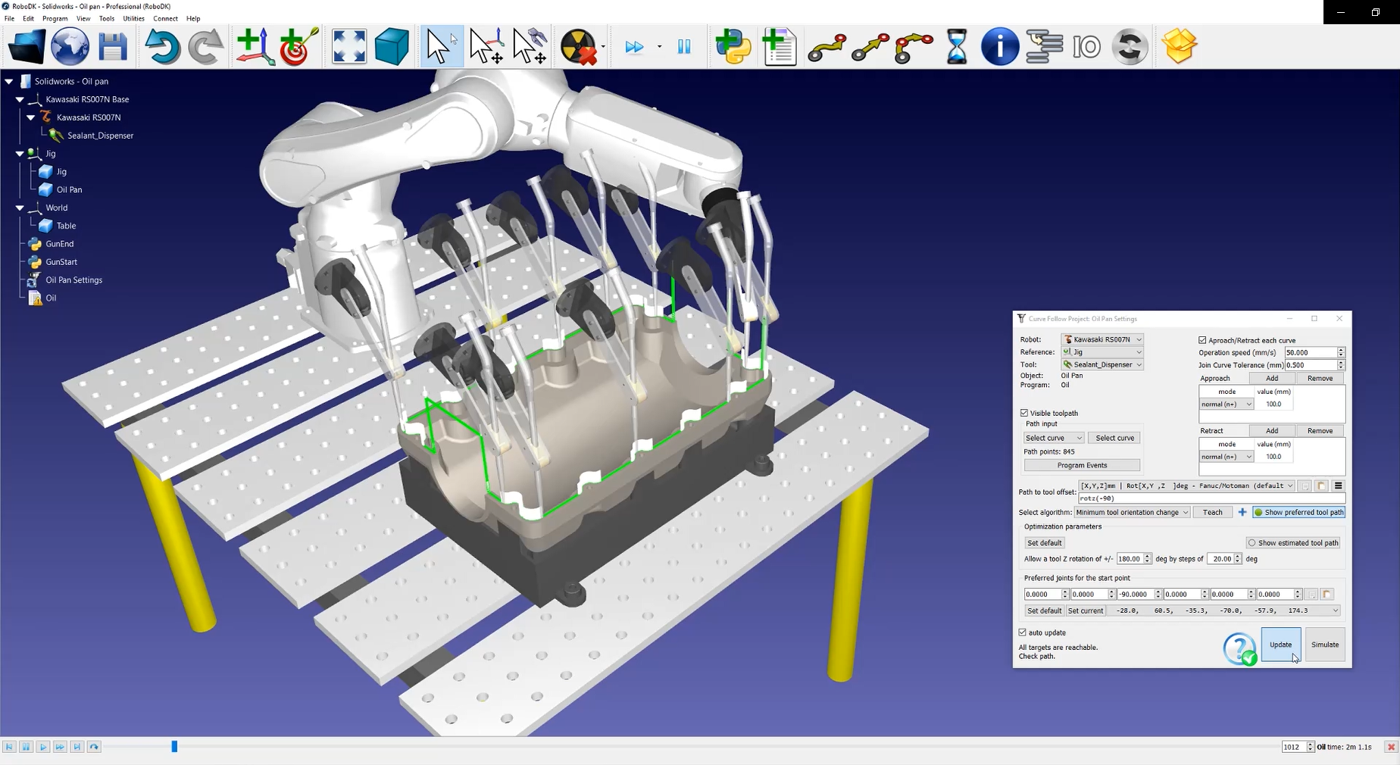
1.Sélectionnez Afficher le parcours préféré de l'outil pour faciliter la visualisation de l'outil le long du parcours, comme le montre l'image ci-dessous.
2.Modifiez la valeur de rotz. Dans cet exemple, la valeur de -90 degrés est définie.
3.Sélectionnez Update➔ Simulate.
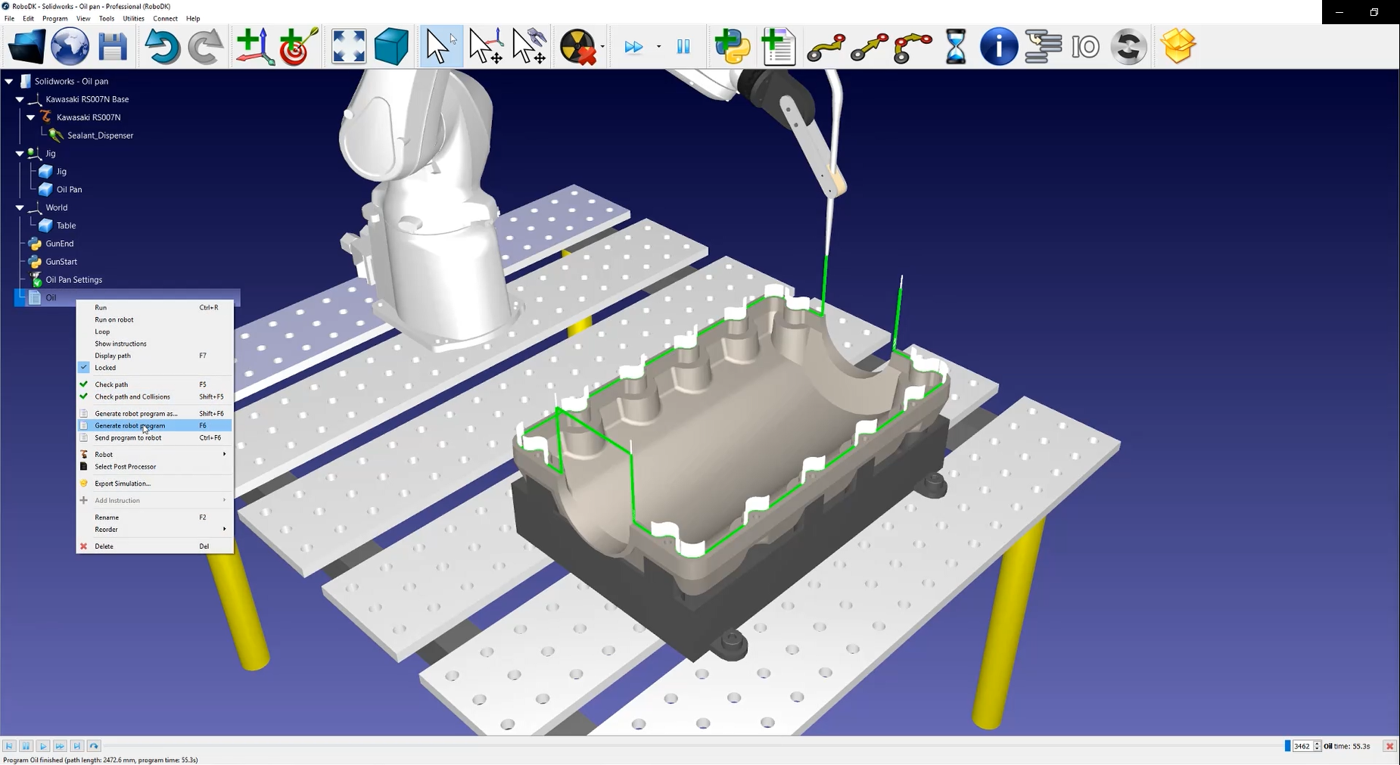
Pour générer votre programme de robot, faites un clic droit sur
Le fichier .pg est maintenant prêt à être transféré vers votre contrôleur de robot.