Méthode 1 : Extraction des caractéristiques
Ouvrez votre objet 3D dans Fusion 360. Dans cet exemple, l'objet 3D est une pièce de métal estampée
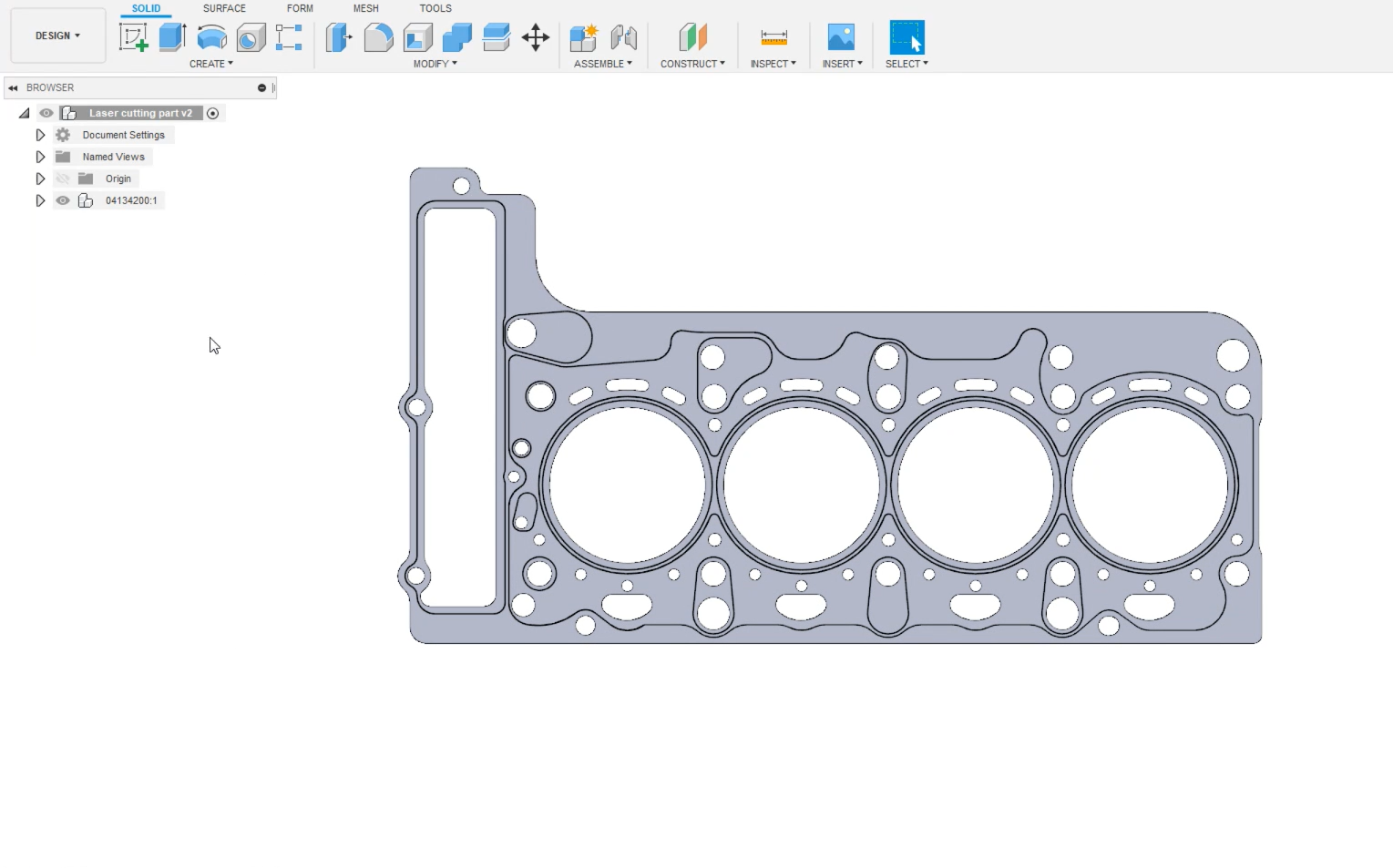
Le but de ce projet est de créer automatiquement un programme de robot qui coupera tous ces trous avec un cutter. Programmer cela à la main prendrait trop de temps.
1.Sélectionnez la section Design de Fusion dans le coin supérieur gauche.
2.Sélectionnez l'onglet Outils. C'est là que vous trouverez le plugin RoboDK.
3.Cliquez sur le bouton
La pièce a été importée dans le système de coordonnées actif de votre station RoboDK. Assurez-vous que la pièce a été importée dans la bonne orientation. Dans cet exemple, vous devrez modifier l'orientation de la pièce.
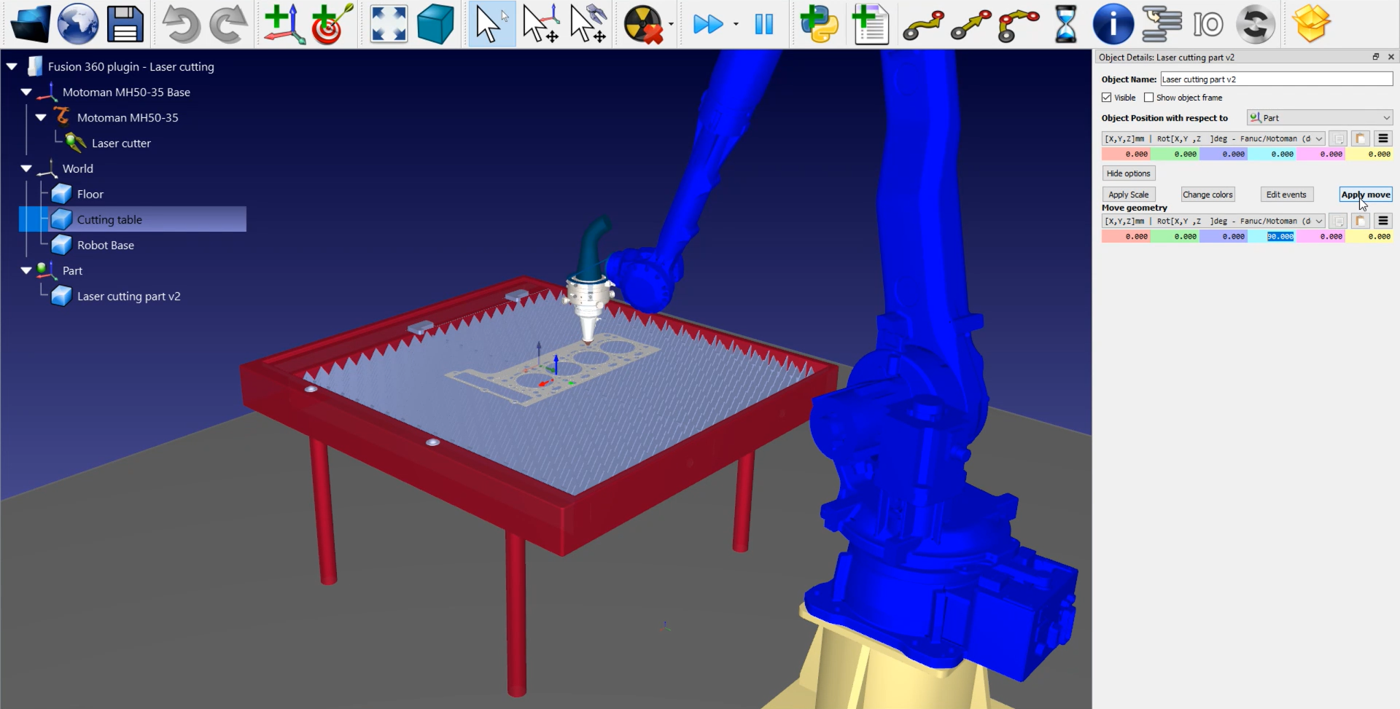
Suivez les étapes suivantes pour modifier l'orientation de votre pièce :
1.Double-cliquez sur la pièce de découpe laser
2.Cliquez sur Plus d'options dans le menu ouvert.
3.Allez dans Déplacer la géométrie et entrez 90 dans l'axe X (bleu clair) comme indiqué dans l'image ci-dessus.
4.Cliquez sur Appliquer le déplacement pour enregistrer l'orientation.
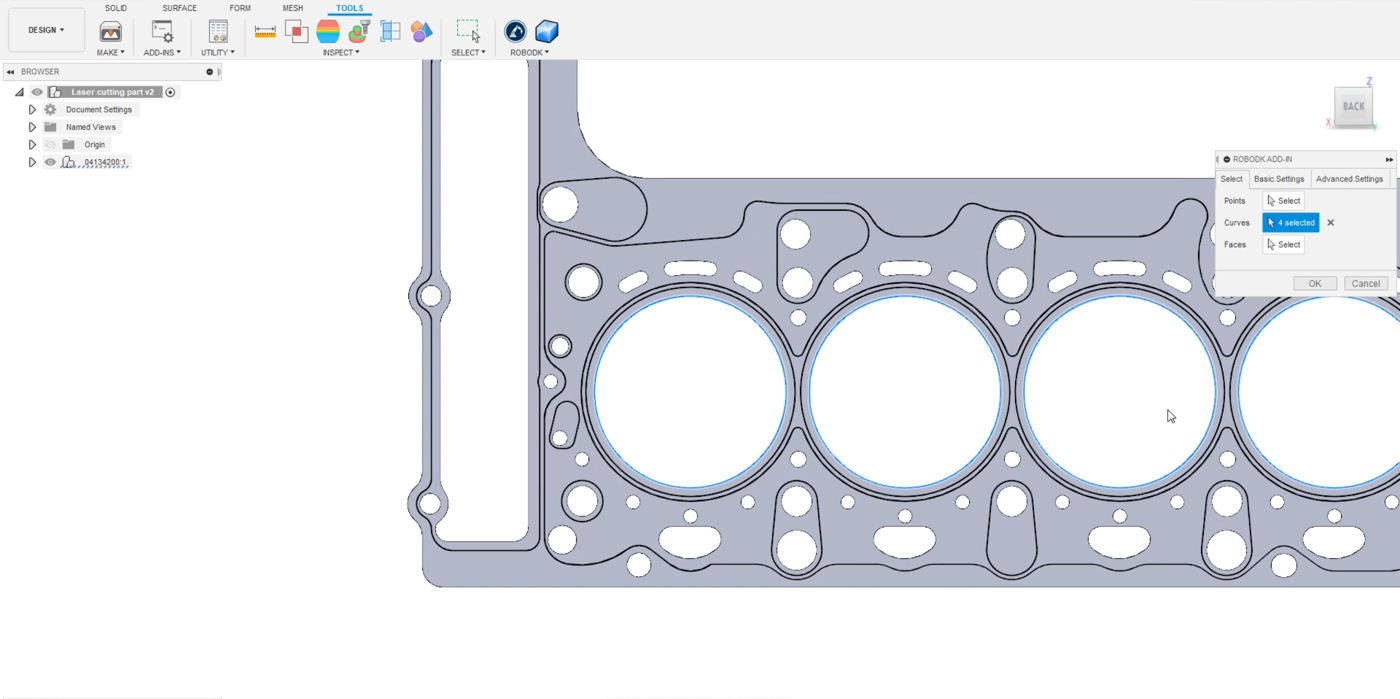
Le plugin RoboDK dispose d'une autre fonctionnalité dans Fusion 360 qui vous aidera à importer votre parcours de découpe dans RoboDK.
1.Retournez à Fusion 360.
2.Dans le menu du plugin RoboDK, sélectionnez Courbe(s) de charge.
3.Sélectionnez Courbes dans le menu ouvert.
4.Sélectionnez les bords des quatre grands cercles comme indiqué dans l'image ci-dessous.
Vous devez maintenant donner à RoboDK une orientation pour l'outil du robot.
1.Sélectionnez sur Faces (surfaces) dans le menu ouvert.
2.Sélectionnez les faces pour lesquelles vous souhaitez que l'outil soit normal, comme indiqué dans l'image ci-dessous.
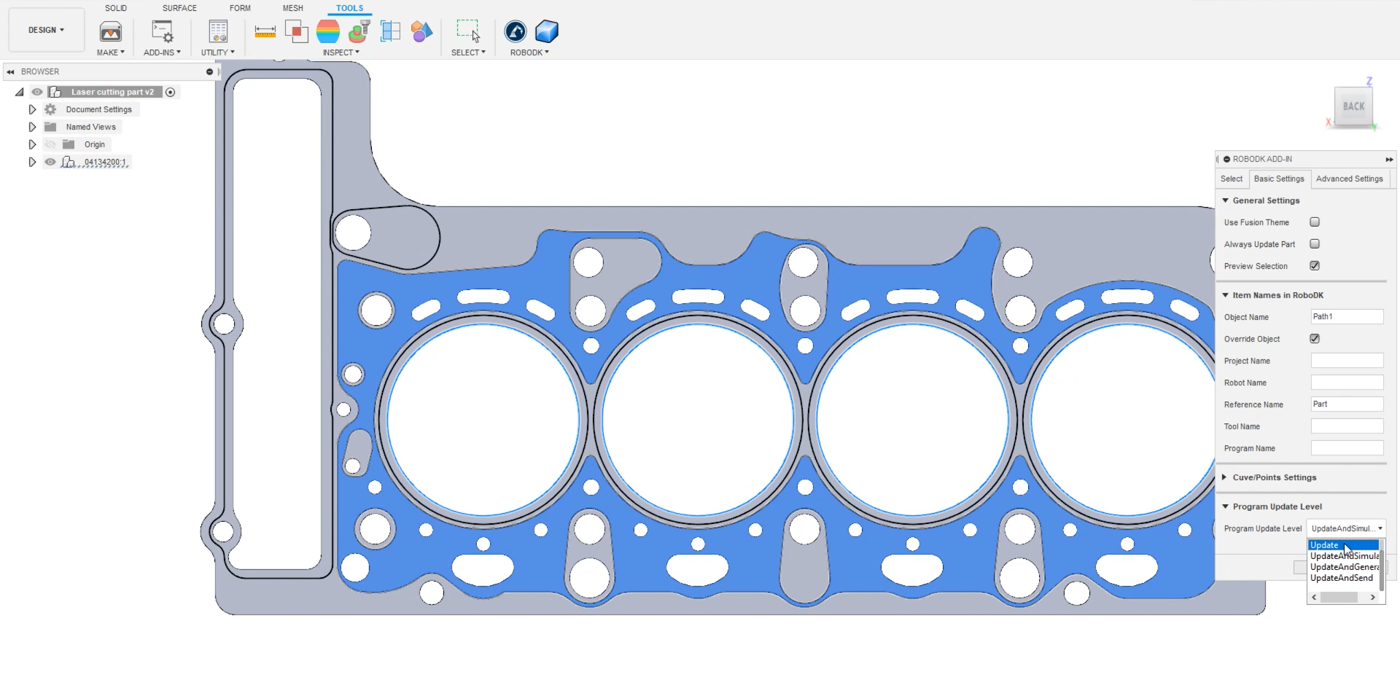
Vous pouvez maintenant configurer les paramètres :
1.Dans le même menu, allez dans Paramètres de base.
2.Décochez la case Use Fusion Theme si vous préférez conserver le comportement par défaut de RoboDK.
3.Saisissez un nom d'objet pour nommer votre parcours. Dans cet exemple, il s'agira du parcours 1.
4.Saisissez un nom de référence dans lequel vous souhaitez l'exporter. Dans cet exemple, il est nommé Pièce, le même que dans la station RoboDK.
5.Sélectionnez Mise à jour dans le niveau de mise à jour du programme pour avoir plus d'options par la suite, comme le montre l'image ci-dessus. Cette option est facultative.
6.Cliquez sur OK.
Vous devriez maintenant être en mesure de voir le parcours importé dans RoboDK. Dans cet exemple, l'orientation est à nouveau erronée et vous devrez modifier l'orientation comme vous l'avez fait pour la pièce précédente.
1.Double-cliquez sur votre parcours, dans cet exemple il s'agit de
2.Cliquez sur Plus d'options dans le menu ouvert.
3.Allez dans Déplacer la géométrie et entrez 90 dans l'axe X (bleu clair).
4.Cliquez sur Appliquer le déplacement pour enregistrer l'orientation.
L'étape suivante consiste à vérifier si l'ordre dans lequel les sections du parcours seront exécutées est correct en sélectionnant
1.Double-cliquez sur les paramètres de votre parcours, ici
2.Assurez-vous que le robot, la référence et l'outil sont les bons.
3.Cliquez sur Sélectionner une courbe.
4.Sélectionnez les autres cercles.
5.Cliquez sur
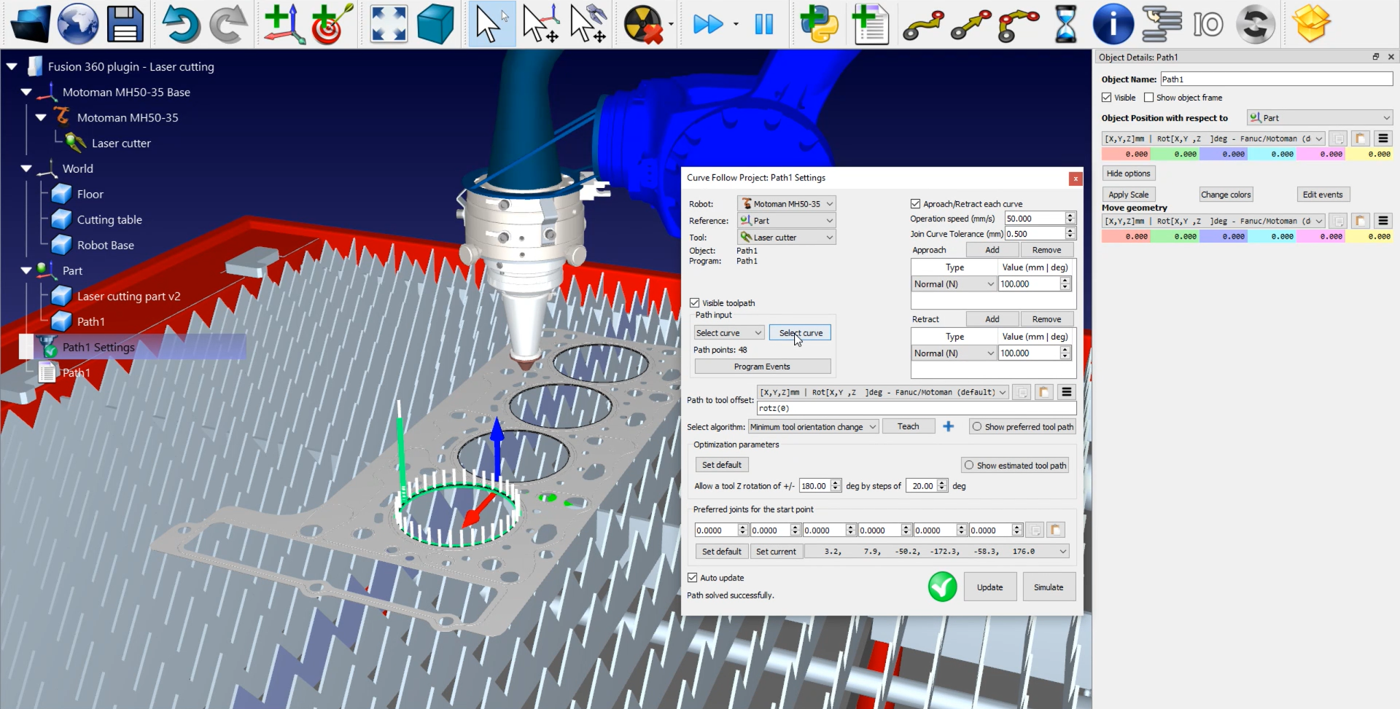
Vous pouvez maintenant remarquer que les mouvements d'approche et de rentrée sont un peu trop longs.
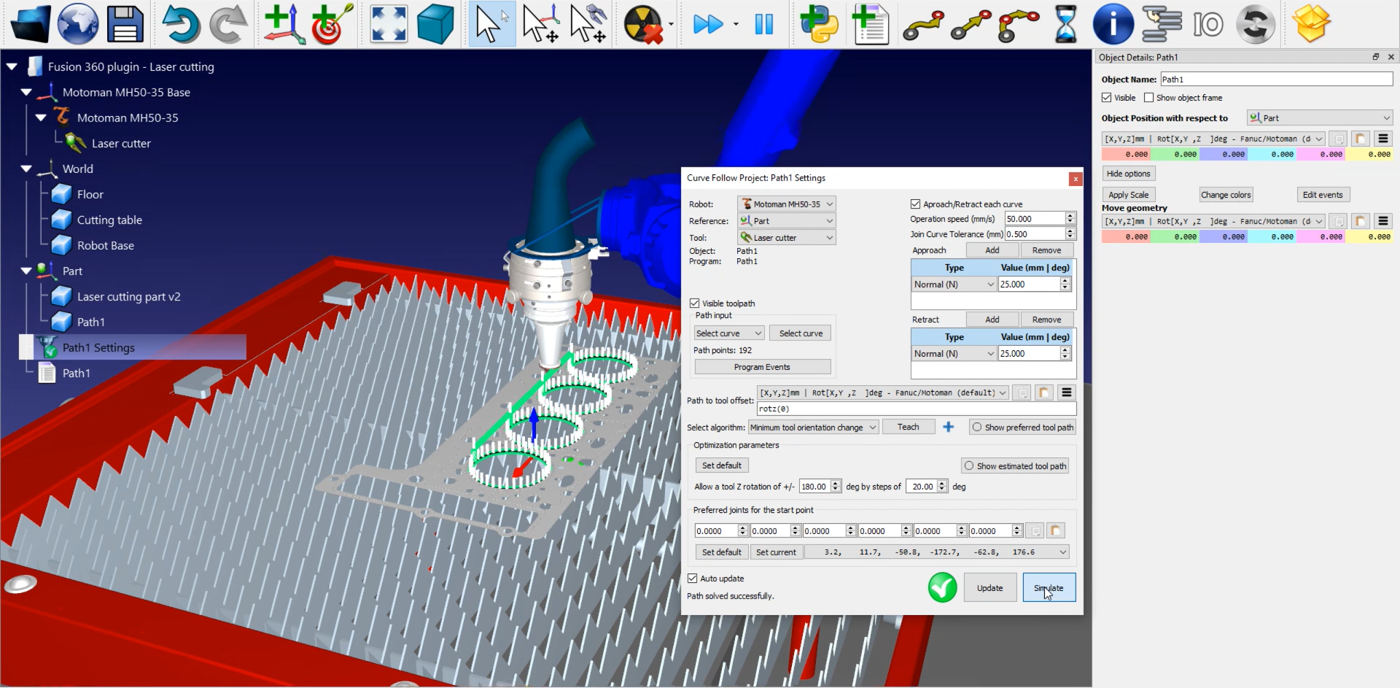
Vous pouvez facilement modifier ces valeurs :
1.Double-cliquez sur les paramètres de votre parcours, ici
2.Entrez une valeur plus petite dans les cases Approche et Rétraction. Dans cet exemple, vous pouvez saisir 25 mm.
3.Cliquez sur Update➔ Simulate.
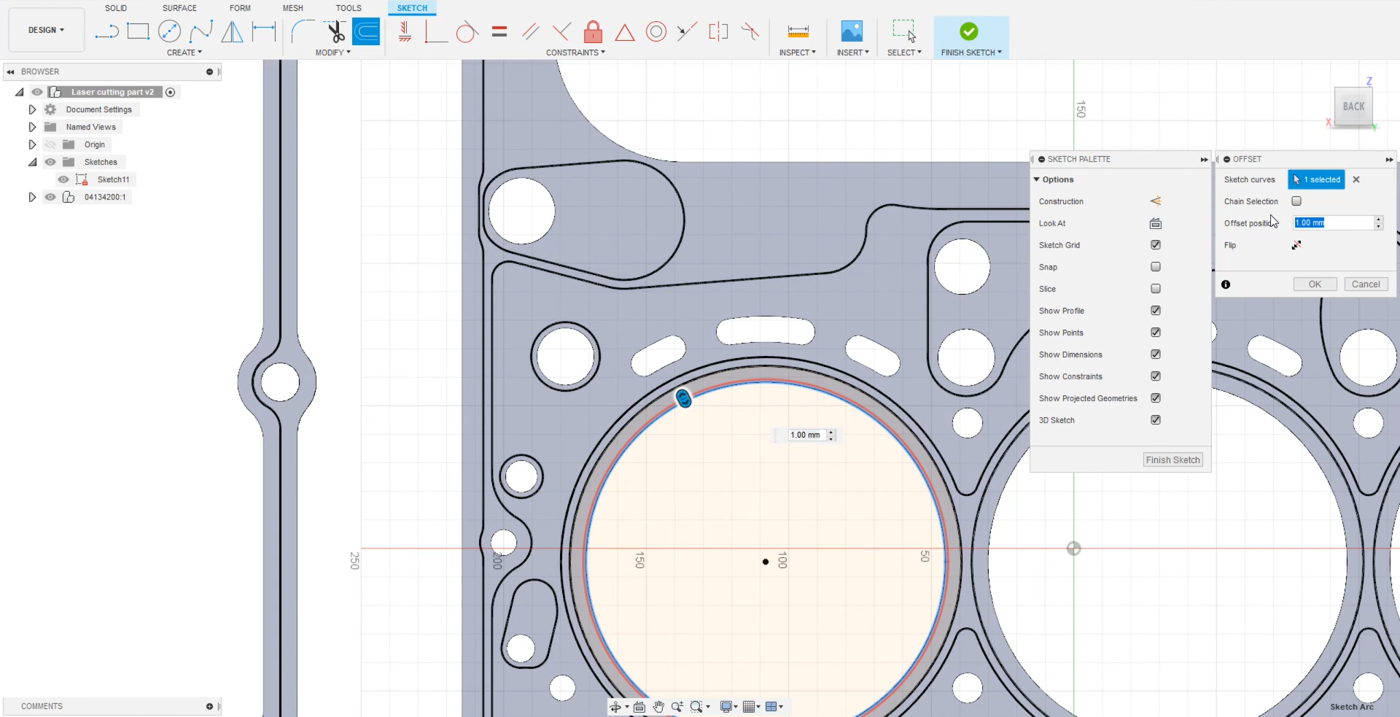
L'étape suivante consiste à examiner le rayon du laser. Dans cet exemple, le laser coupe trop de matière.
Comment configurer votre rayon laser :
1.Retournez à Fusion 360.
2.Allez dans l'onglet Solid➔ Create Sketch (Créer une esquisse) pour créer votre esquisse.
3.Sélectionnez un cercle et cliquez sur Décalage dans le menu supérieur pour créer un nouveau parcours.
4.Si le diamètre du faisceau laser est de 2 mm, le rayon sera de 1 mm. Saisissez 1 dans la case Position de décalage, comme indiqué dans l'image ci-dessous.
5.Répétez ces étapes pour les 3 autres cercles.
6.Cliquez sur Ok.
Vous pouvez maintenant charger les courbes dans RoboDK.
1.Allez dans l'onglet Outils.
2.Cliquez sur RoboDK➔ Courbe(s) de charge.
3.Sélectionnez Courbes et cliquez sur l'esquisse de chaque cercle.
4.Sélectionnez Visages et cliquez sur le visage pour lequel vous souhaitez que l'outil soit normal.
5.Dans cet exemple, le nom de l'objet (Paramètres de base) est Chemin2.
6.Cliquez sur Ok pour importer le parcours dans RoboDK.
Vous pouvez modifier l'orientation du chemin 2 comme expliqué ci-dessus. Si vous vous rapprochez, vous pouvez voir la différence entre les deux parcours. Vous pouvez maintenant supprimer le chemin 1.
L'étape suivante consiste à vérifier si les sections de parcours que vous avez chargées sont correctes :
1.Sélectionnez
2.Cliquez sur Sélectionner une courbe et sélectionnez les autres cercles comme indiqué dans l'image ci-dessous.
3.Sélectionnez
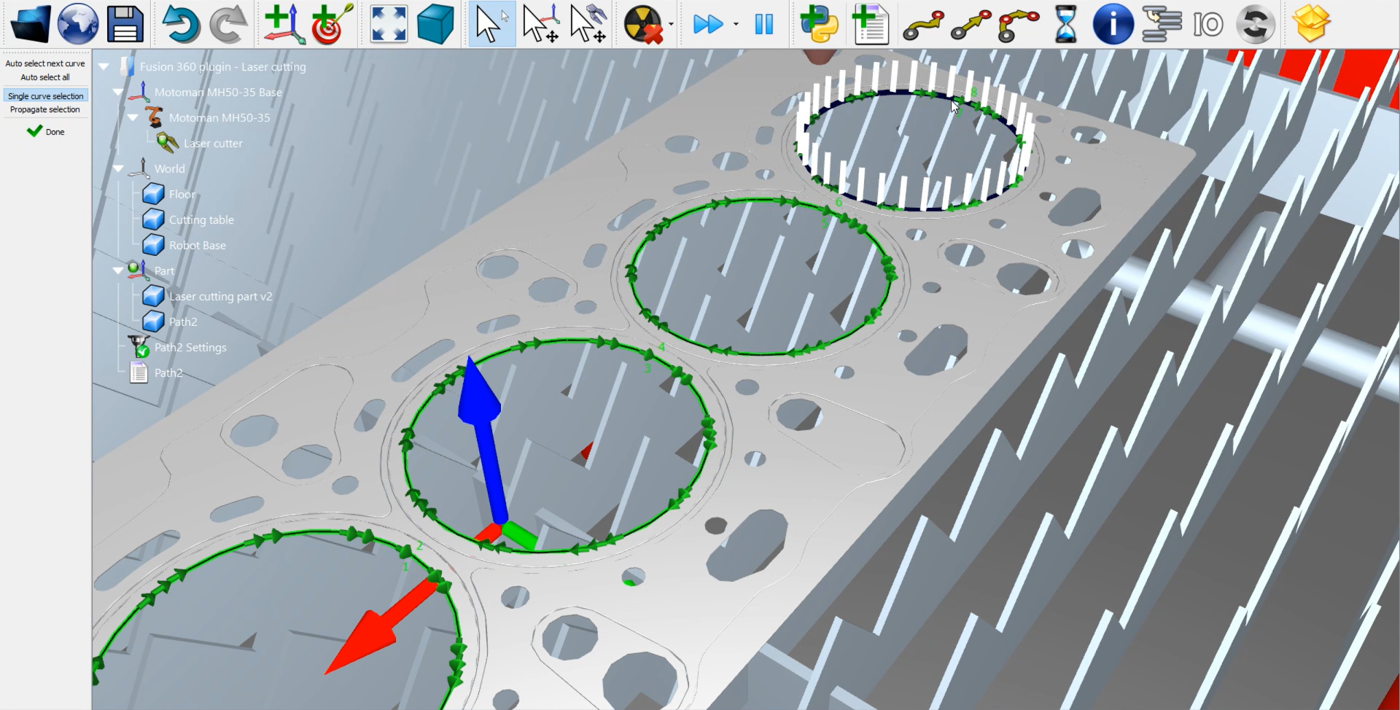
Vous pouvez réduire la taille des mouvements d'Approche et de Rétraction comme expliqué ci-dessus. Dans cet exemple, vous pouvez saisir à nouveau 25 mm. N'oubliez pas de mettre à jour➔ Simuler votre projet de suivi de courbe pour enregistrer vos paramètres. Vous pouvez procéder de la même manière pour tous les autres trous de cette pièce.
Cette façon de construire un programme de découpe laser fonctionne pour le plugin Fusion 360 de RoboDK, mais aussi pour tous les plugins CAO.