Pick and Place
Introduction à la sélection et au placement
La préparation de commandes désigne le processus automatisé au cours duquel des robots prélèvent des pièces ou des articles à un endroit et les placent à un autre endroit. L'automatisation des opérations de prélèvement et de placement permet d'augmenter les taux de production.
Les robots de prélèvement et de placement peuvent effectuer des tâches répétitives tout en permettant aux travailleurs humains de se concentrer sur des tâches plus complexes. Ces systèmes robotiques sont un élément essentiel de nombreuses chaînes de fabrication et de production, car ils permettent d'automatiser les tâches répétitives et fastidieuses.
Vidéo : Regardez ce tutoriel vidéo présentant le Pick and Place avec des robots : Pick and Place - RoboDK Webinar.
Les bras robotisés peuvent facilement effectuer des opérations de prélèvement et de mise en place. Même s'il existe des bras robotisés dédiés à certaines applications de prélèvement et de mise en place (comme la palettisation pour la palettisation, ou les robots Scara pour l'assemblage de circuits imprimés), un bras robotisé générique à 6 axes convient à toutes les opérations de prélèvement et de mise en place.
Exemples de prélèvement et de placement
Vous trouverez dans cette section de la documentation des exemples de projets permettant d'effectuer des simulations de prélèvement et de placement.
Les exemples de cette section sont les suivants :
1.Un exemple simple de prise et de dépose où un robot prend une pièce et la dépose à un autre endroit.
2.Un exemple de prélèvement et de placement avec une opération d'assemblage.
3.Un exemple de prélèvement et de placement utilisant l'Add-in de palettisation.
4.Un exemple de prélèvement et de placement à l'aide de l'API.
Exemple simple de prélèvement et de placement
Cette section présente un exemple simple de prise et de dépose d'une boîte à l'aide d'un bras robotisé équipé d'une pince à vide.
Suivez les étapes suivantes pour créer votre exemple de prélèvement et de placement :
Créez un nouveau projet RoboDK
Ces étapes vous montreront comment créer un nouveau projet (également connu sous le nom de station) dans RoboDK pour une application de prélèvement et de mise en place.
1.Ouvrez RoboDK : Lancez l'application RoboDK sur votre ordinateur.
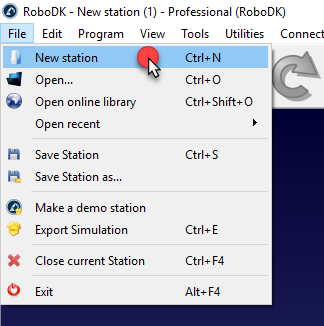
2.Créez une nouvelle station : Sélectionnez File-New Station (Fichier-Nouvelle station) dans le menu principal de RoboDK - Une nouvelle station vide sera créée en tant qu'espace de travail.
3.Add-in d'un robot de la bibliothèque
a.Ouvrez la bibliothèque de robots en ligne pour télécharger un robot
i.Dans le menu principal, sélectionnez Fichier → Ouvrir la bibliothèque en ligne.
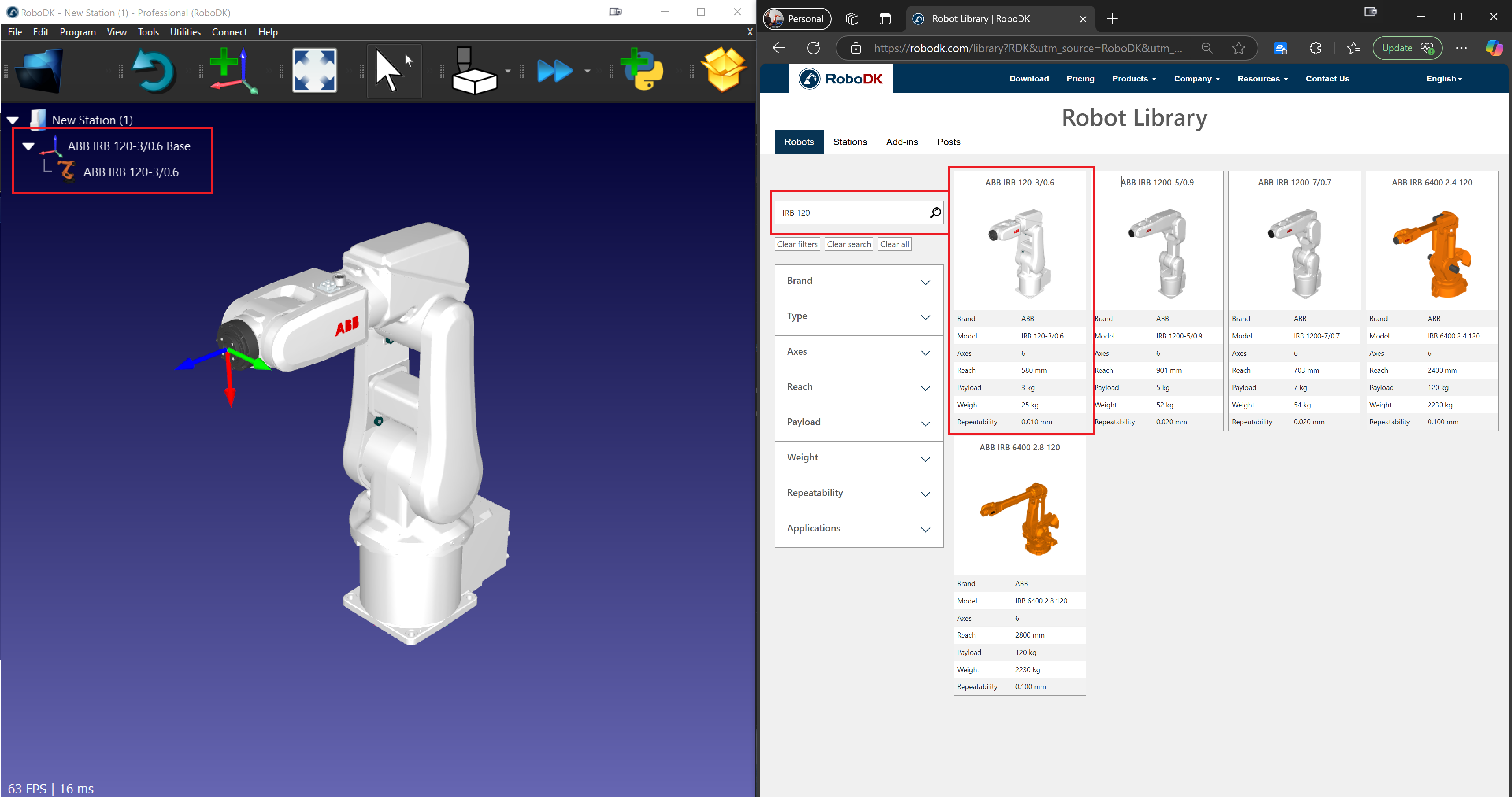
ii.La fenêtre de la bibliothèque RoboDK s'ouvre, affichant une variété de robots industriels.
b.Sélectionnez et importez un robot :
i.Utilisez la barre de recherche pour trouver un robot adapté aux tâches de prise et de dépose (par exemple, UR10, ABB IRB 120, Fanuc LR Mate).
ii.Cliquez sur le robot souhaité et sélectionnez Télécharger.
c.Positionnez le robot dans la station :
i.Le robot apparaît automatiquement dans la station.
ii.Utilisez l'outil de déplacement pour ajuster son emplacement si nécessaire.
4.Ajouter un système de coordonnées
a.Créez un système de coordonnées :
i.Allez dans Programme → Add-in Reference Frame (Ajouter un système de coordonnées).
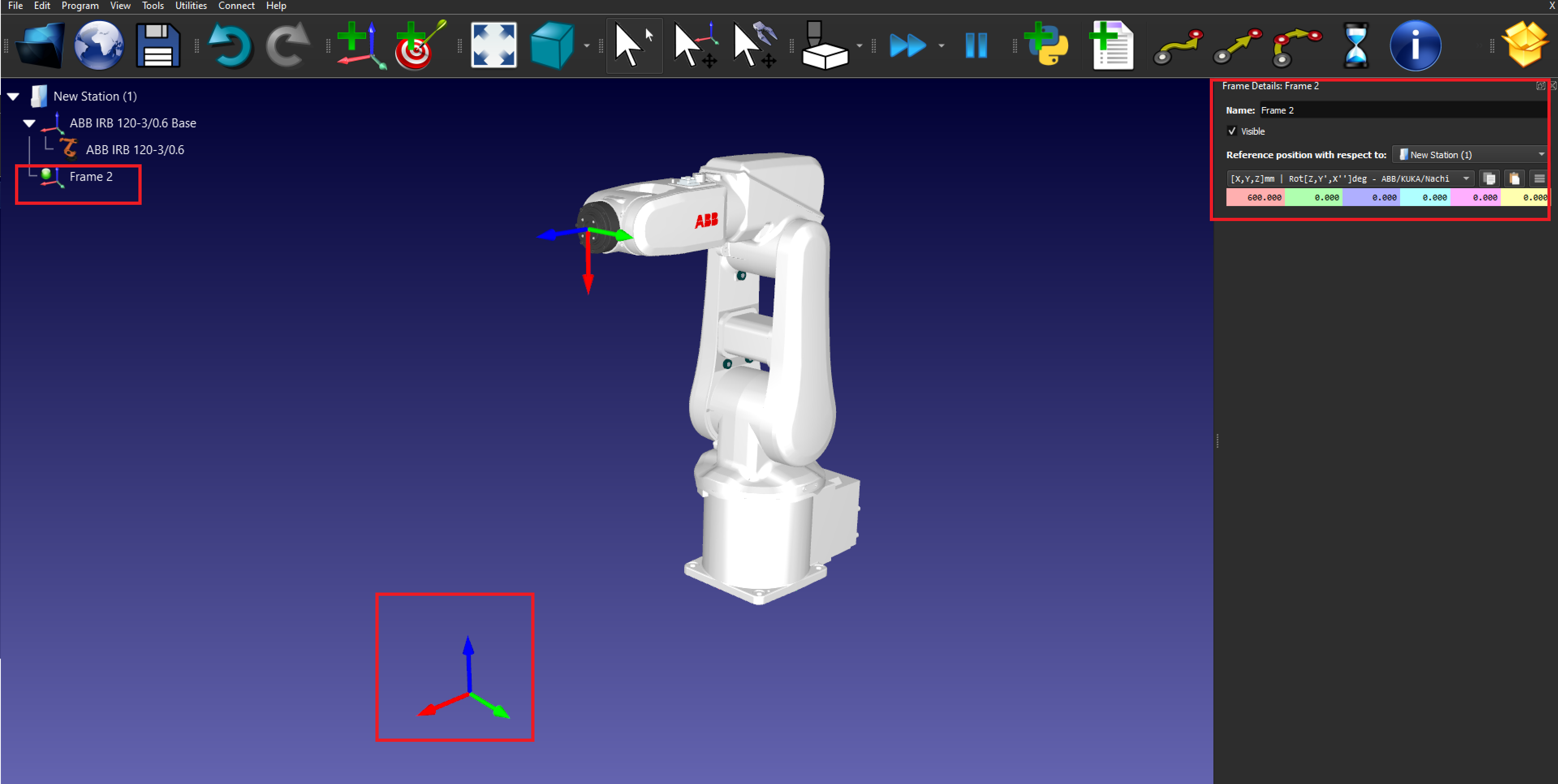
ii.Un nouveau système de coordonnées apparaît dans l'arborescence de la station et dans la vue 3D.
b.Positionnez le système de coordonnées :
i.Double-cliquez sur le système de coordonnées pour saisir les coordonnées (X, Y, Z) et les valeurs de rotation.
ii.Cliquez sur OK pour enregistrer la position.
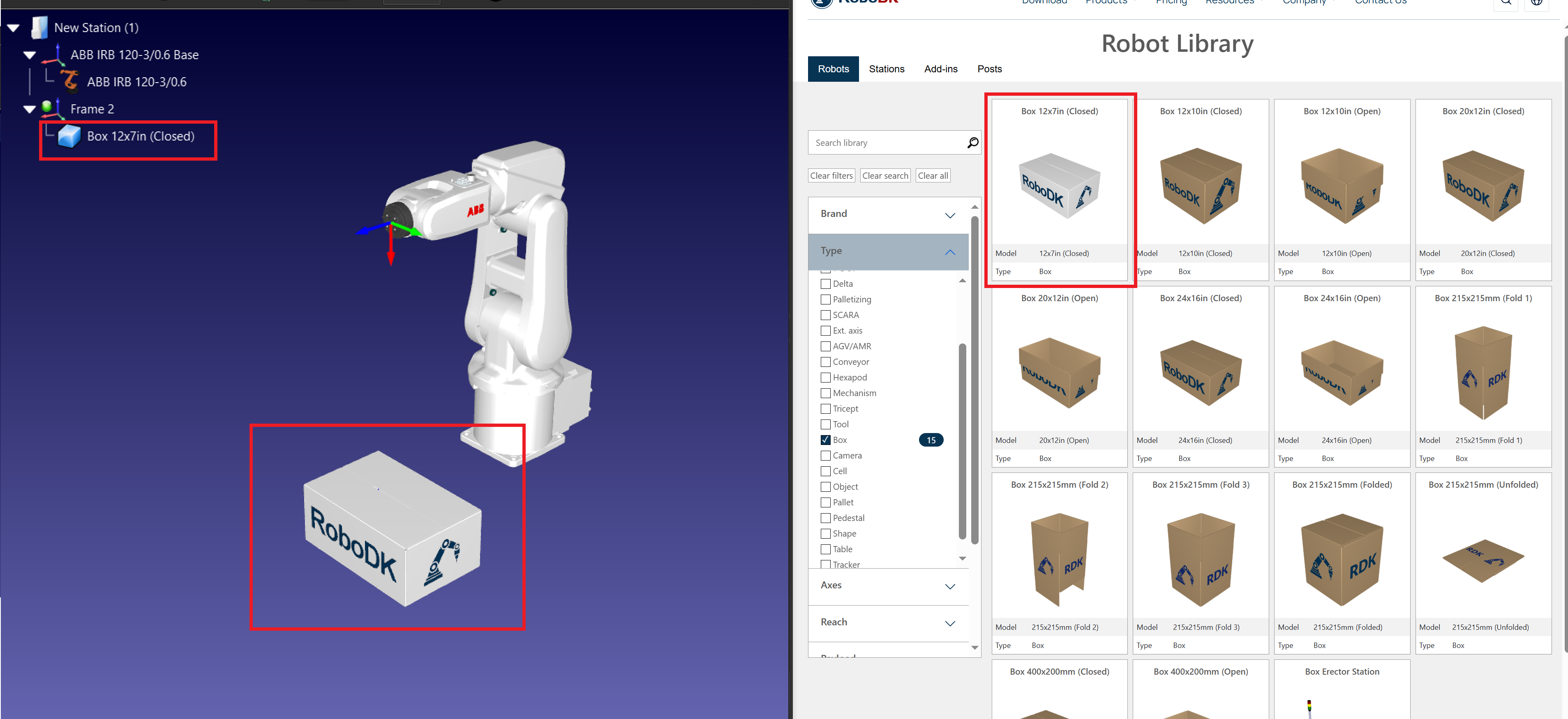
5.Importer des objets 3D
a.Charger les modèles d'objets :
iii.Dans le menu principal, sélectionnez Fichier → Ouvrir.
iv.Parcourez et sélectionnez les modèles 3D des objets à prélever et à placer (par exemple, fichiers STEP, IGES).
b.Positionnez les objets :
v.Utilisez l'outil de déplacement pour ajuster l'emplacement de l'objet dans le système de coordonnées.
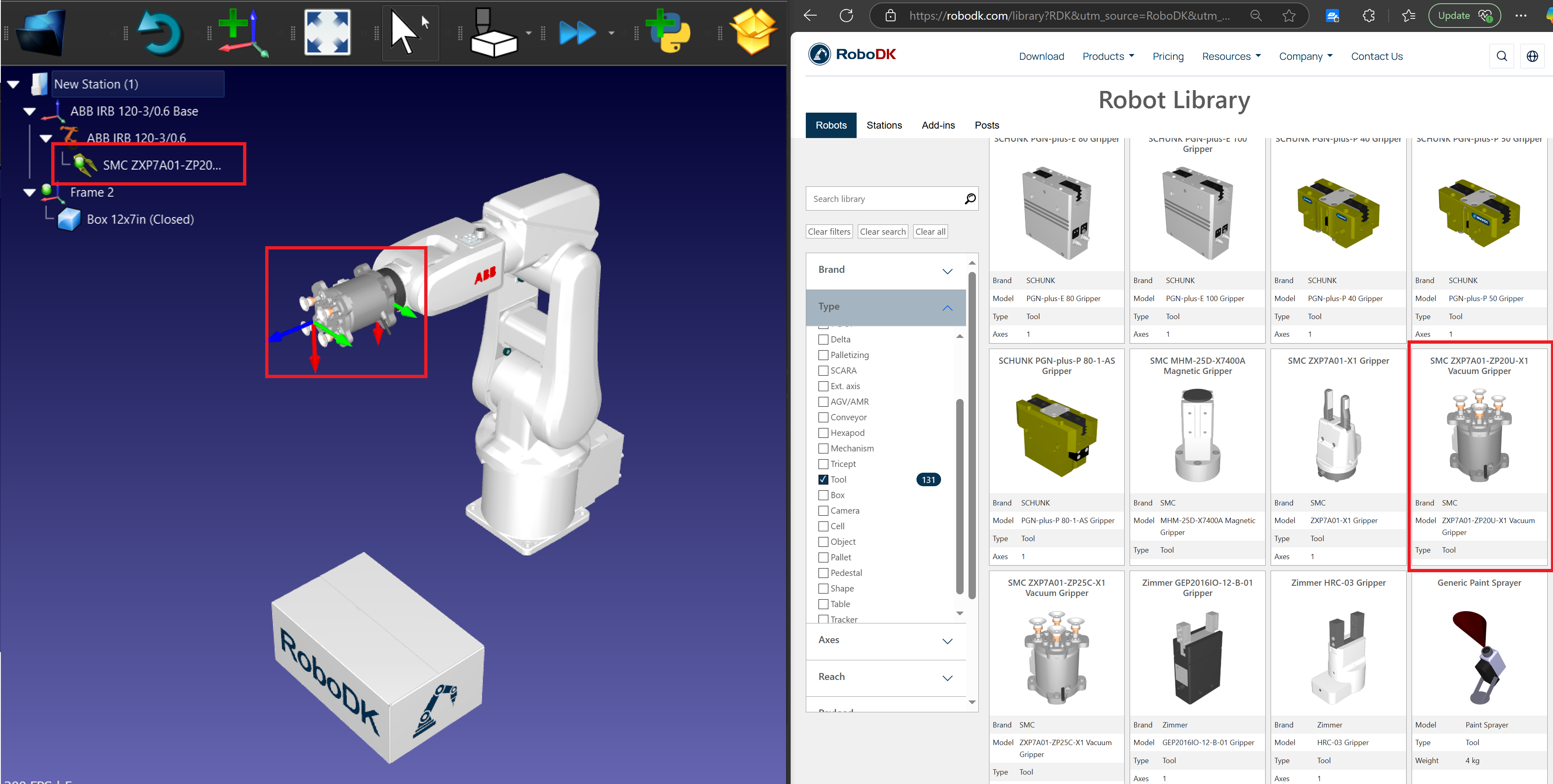
6.Add-in un outil (Gripper)
a.Sélectionnez une pince :
i.Dans le menu principal, allez dans Utilitaires → Ajouter un outil (CDO).
ii.Choisissez une pince dans la bibliothèque de robots ou importez un fichier de pince personnalisé.
b.Fixez l'outil au robot :
i.Cliquez avec le bouton droit de la souris sur la pince dans l'arborescence de la station et sélectionnez Attach to Robot (Attacher au robot).
ii.Choisissez la bride de robot appropriée.
c.Définissez le CDO (point central de l'outil) : Double-cliquez sur l'outil et entrez les coordonnées du CDO par rapport à la bride du robot.
Créez des cibles pour Pick and Place
Suivez les étapes suivantes pour créer une cible de base dans RoboDK pour une application de prélèvement et de mise en place.
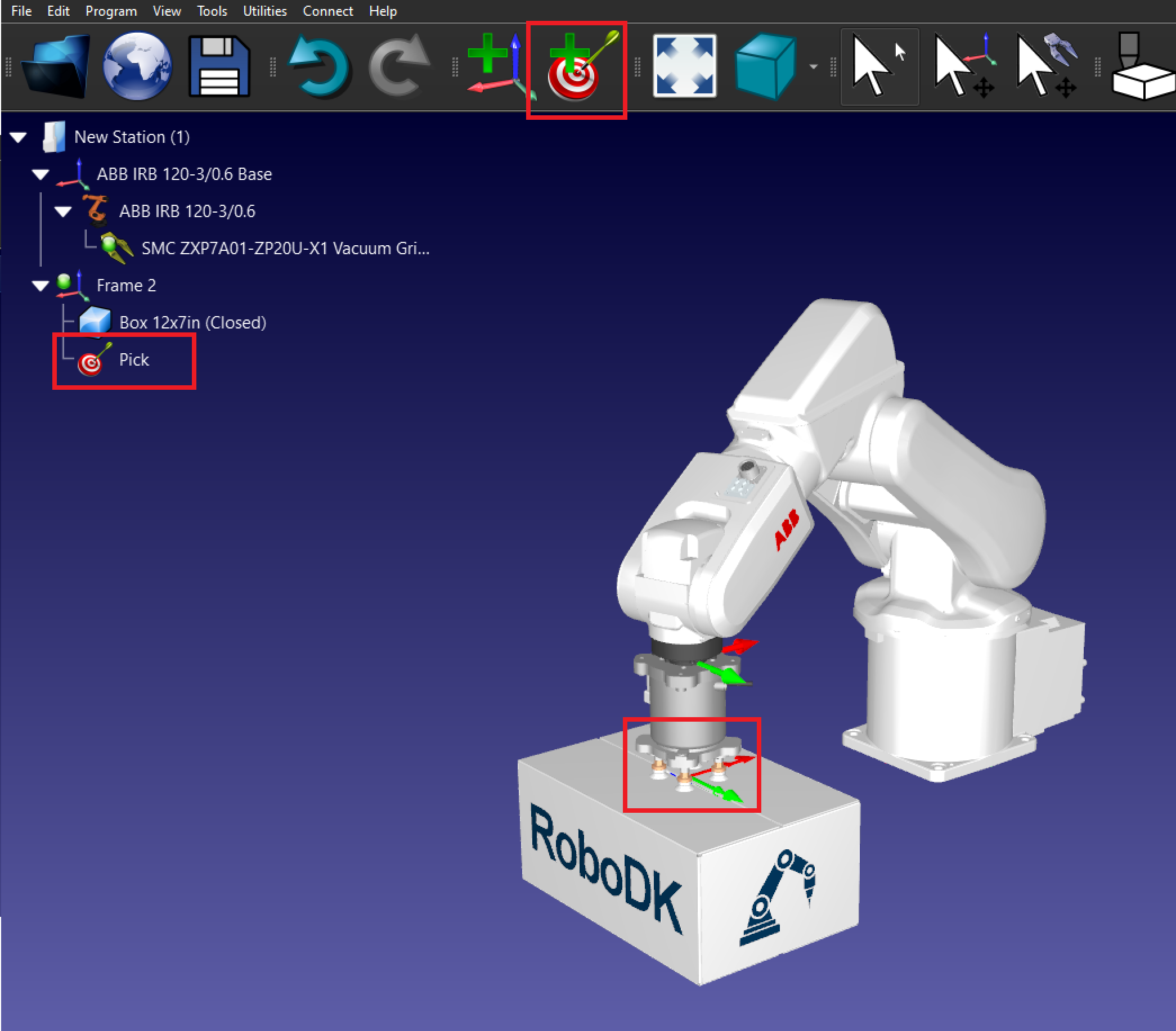
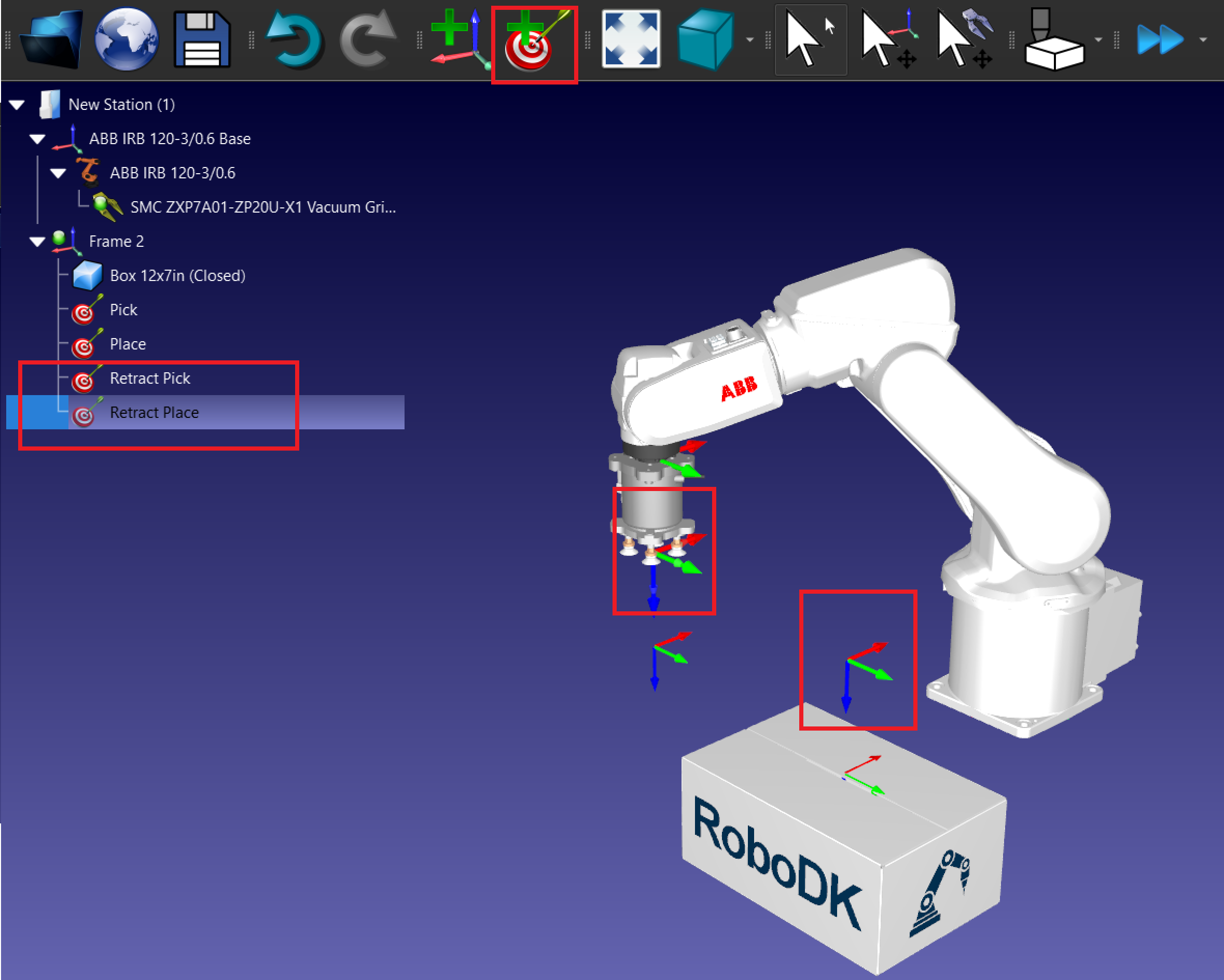
7.Ajoutez des cibles de prélèvement et de placement :
a.Déplacez le robot jusqu'à la position de prélèvement souhaitée.
b.Sélectionnez Programme → Apprentissage de la cible pour enregistrer la position.
c.Répétez l'opération pour les positions Pick, Retract Pick, Place et Retract Place.
8.Organisez les objectifs :
a.Renommez les cibles pour plus de clarté (par exemple, Approach_Pick, Pick, Place). Appuyez sur la touche F2 pour renommer les cibles.
b.N'oubliez pas de créer les cibles sous les systèmes de coordonnées appropriés dans l'arbre des stations.
9.Créez la position Pick : Placez le robot au-dessus de la boîte et créez une cible appelée Pick.
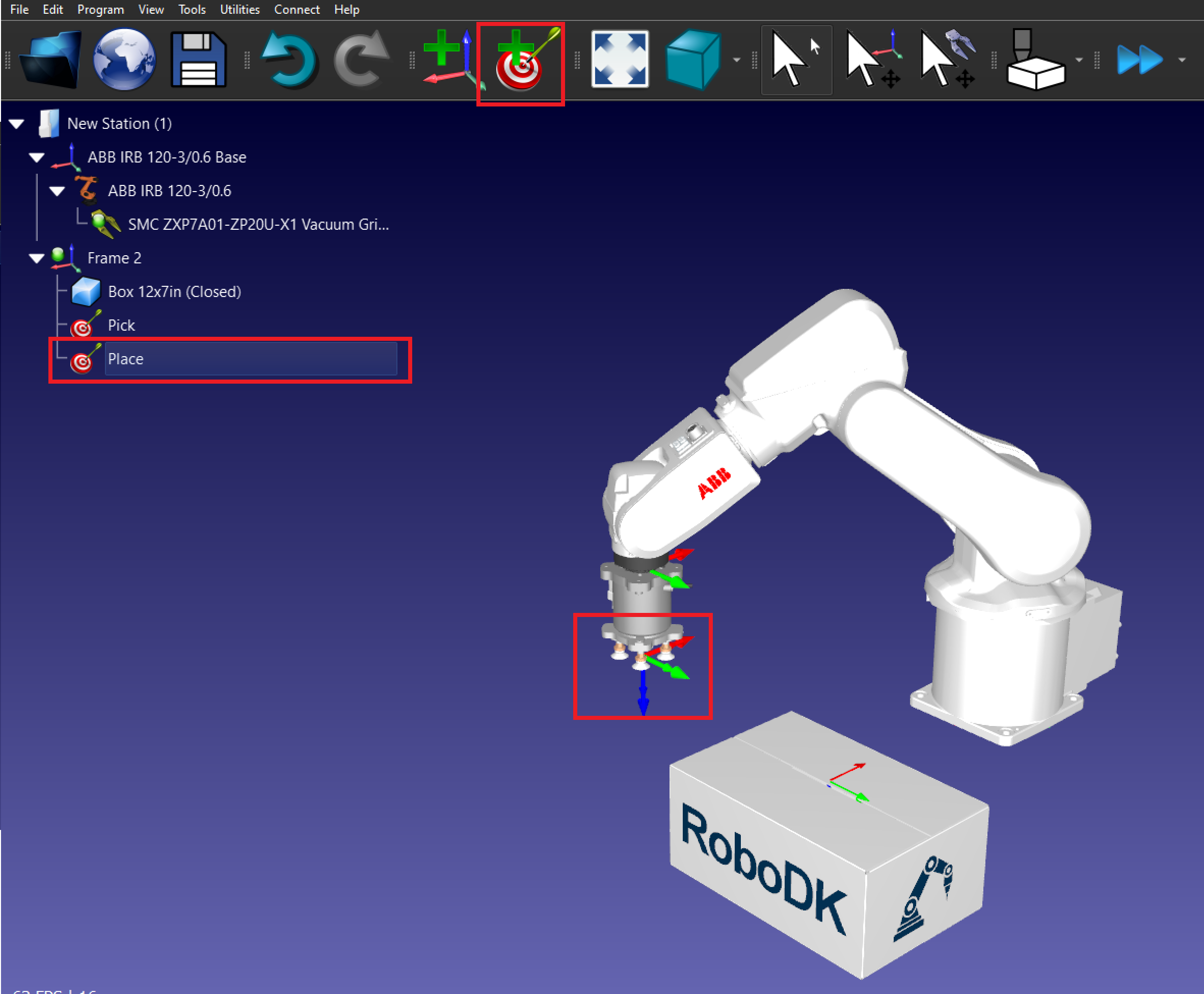
10.Créez la position Place : Déplacez le robot à l'endroit où vous souhaitez placer la boîte et créez une position appelée Place.
11.Créez les cibles de rétractation :
a.Déplacez le robot vers la cible Pick et vers le haut sur l'axe Z.
b.Créez une nouvelle cible appelée Pick Retract.
c.Répétez l'opération avec la cible Place.
Créez un programme de prélèvement et de placement
Suivez ces étapes pour créer un programme de prise et de dépose de base dans RoboDK avec un bras robotisé à 6 axes utilisant une pince à vide pour déplacer une boîte.
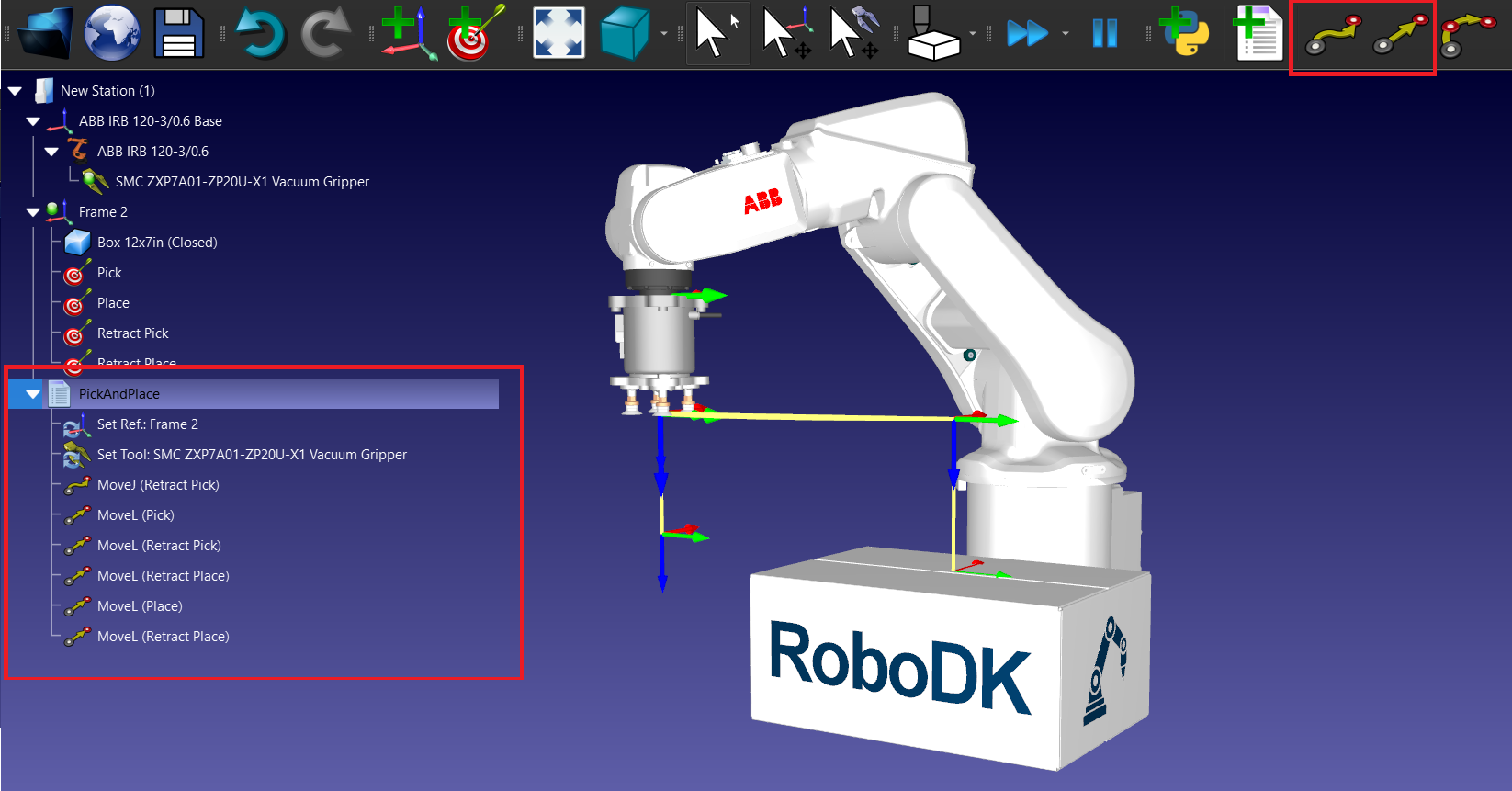
1.Programmez l'opération de prélèvement et de dépose :
a.Créez un nouveau programme : Allez dans Programme → Add-in et nommez-le PickAndPlace.
b.Ajoutez des instructions de mouvement :
i.Ajoutez des instructions MoveJ ou MoveL pour chaque cible.
ii.Déplacez d'abord le robot vers la cible de rétraction, puis créez un MoveL vers la cible Pick et revenez à la cible de rétraction.
iii.Répétez l'opération avec la cible Place.
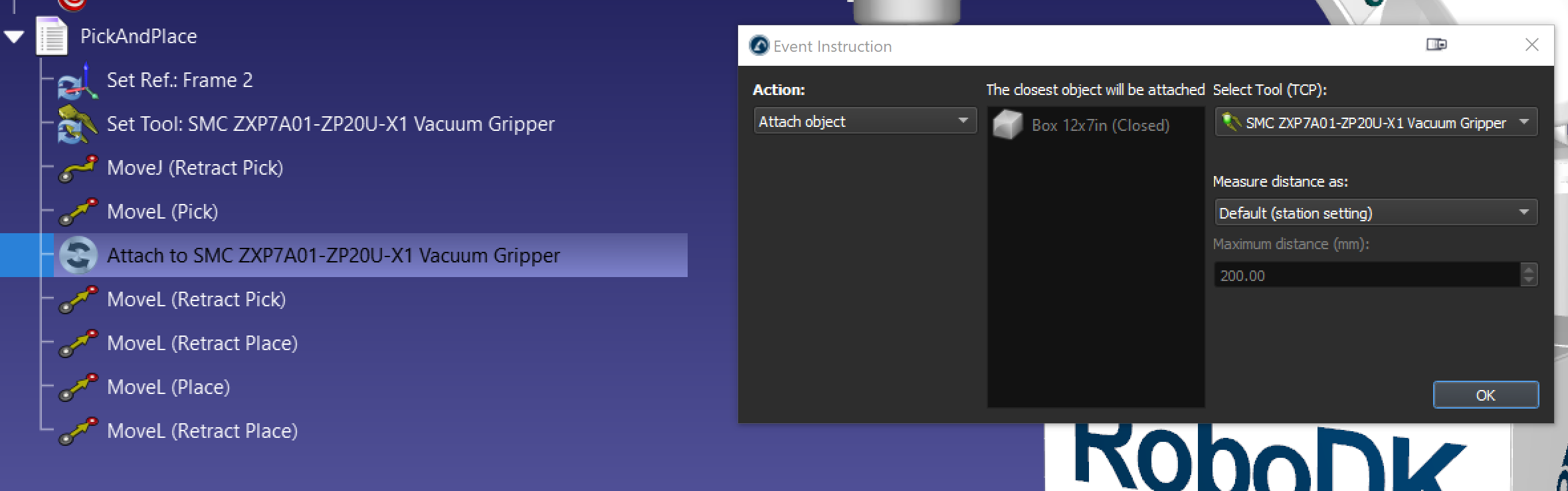
2.L'événement Add-in permet de prélever et de placer l'objet.
a.Pour ajouter un événement, allez dans Programme → Instruction d'événement de simulation.
b.Ajoutez un événement avec l'action Attach object pour prélever la boîte après le MoveL (Pick).
c.Ajoutez un événement avec l'action Détacher l'objet, placez la boîte après le MoveL (Place). L'option Attacher au parent permet d'attacher l'objet à un nouvel objet une fois qu'il est détaché de la pince.
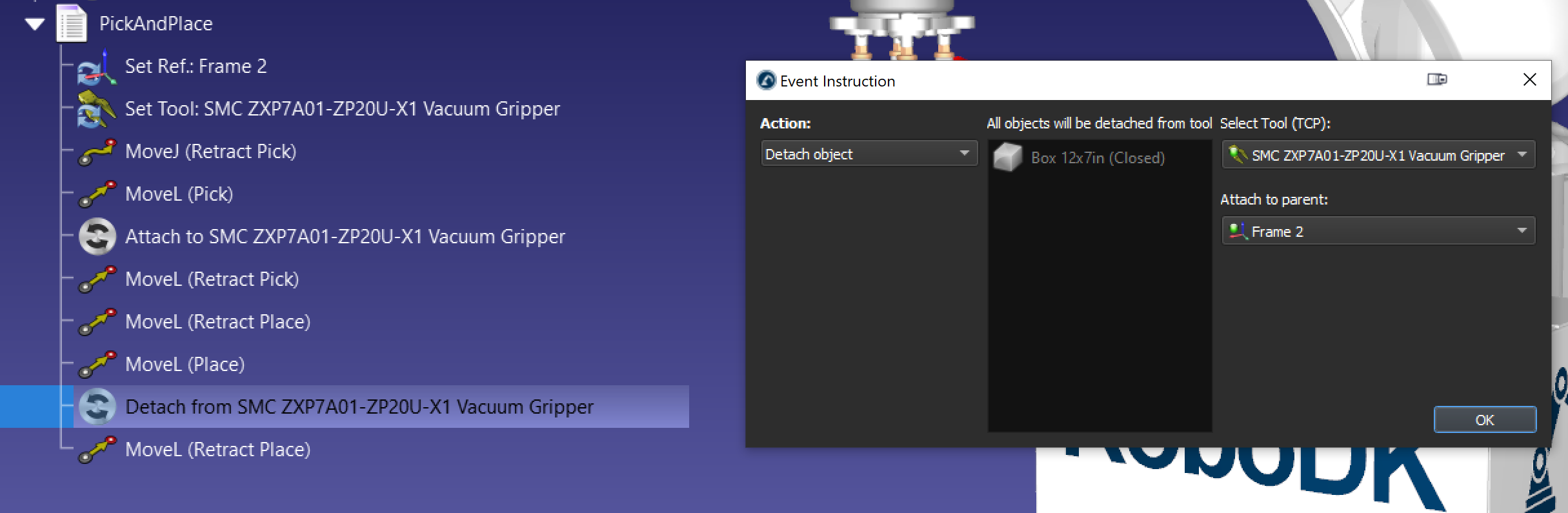
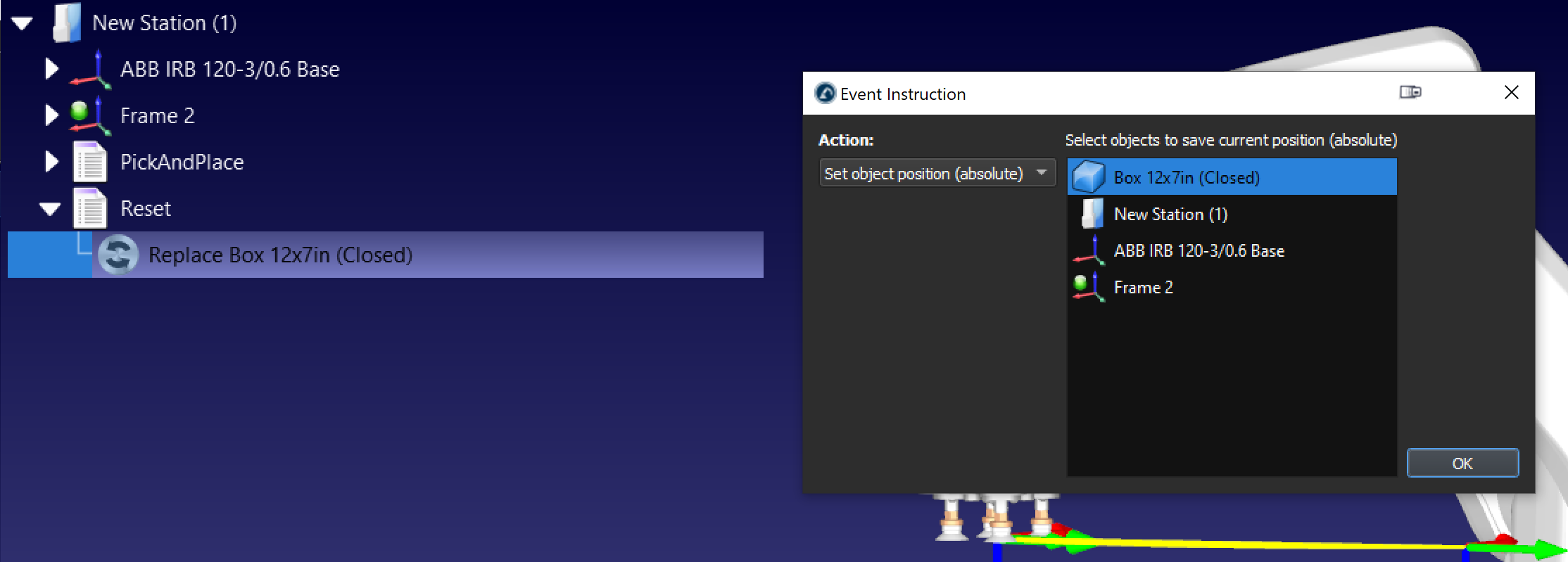
d.Il est conseillé de créer un programme séparé avec une action d'événement Définir la position de l'objet pour réinitialiser la boîte à sa position d'origine si nécessaire.
En suivant ces étapes, vous pouvez créer avec succès une station pick-and-place de base dans RoboDK.
Pick and Place et assemblage
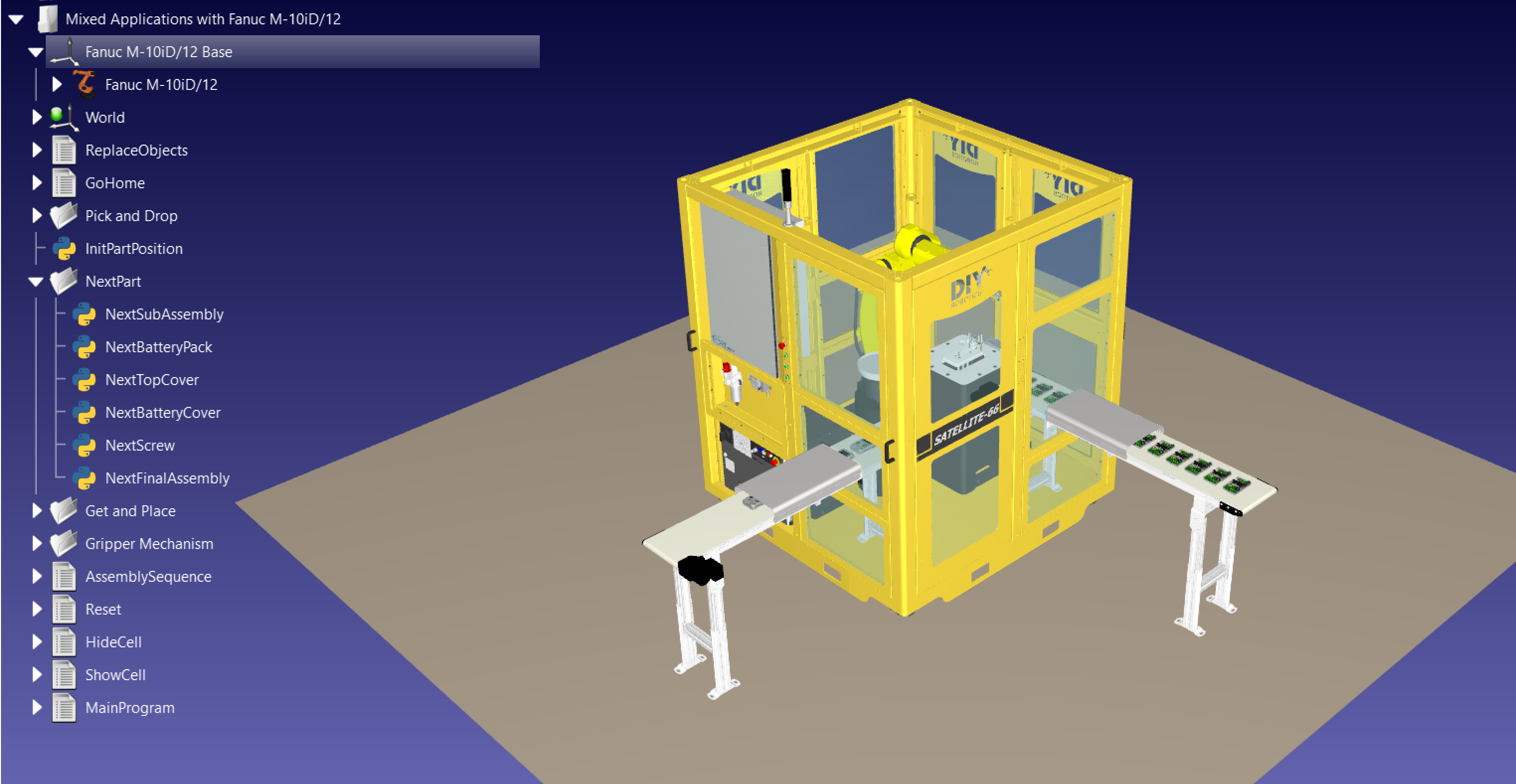
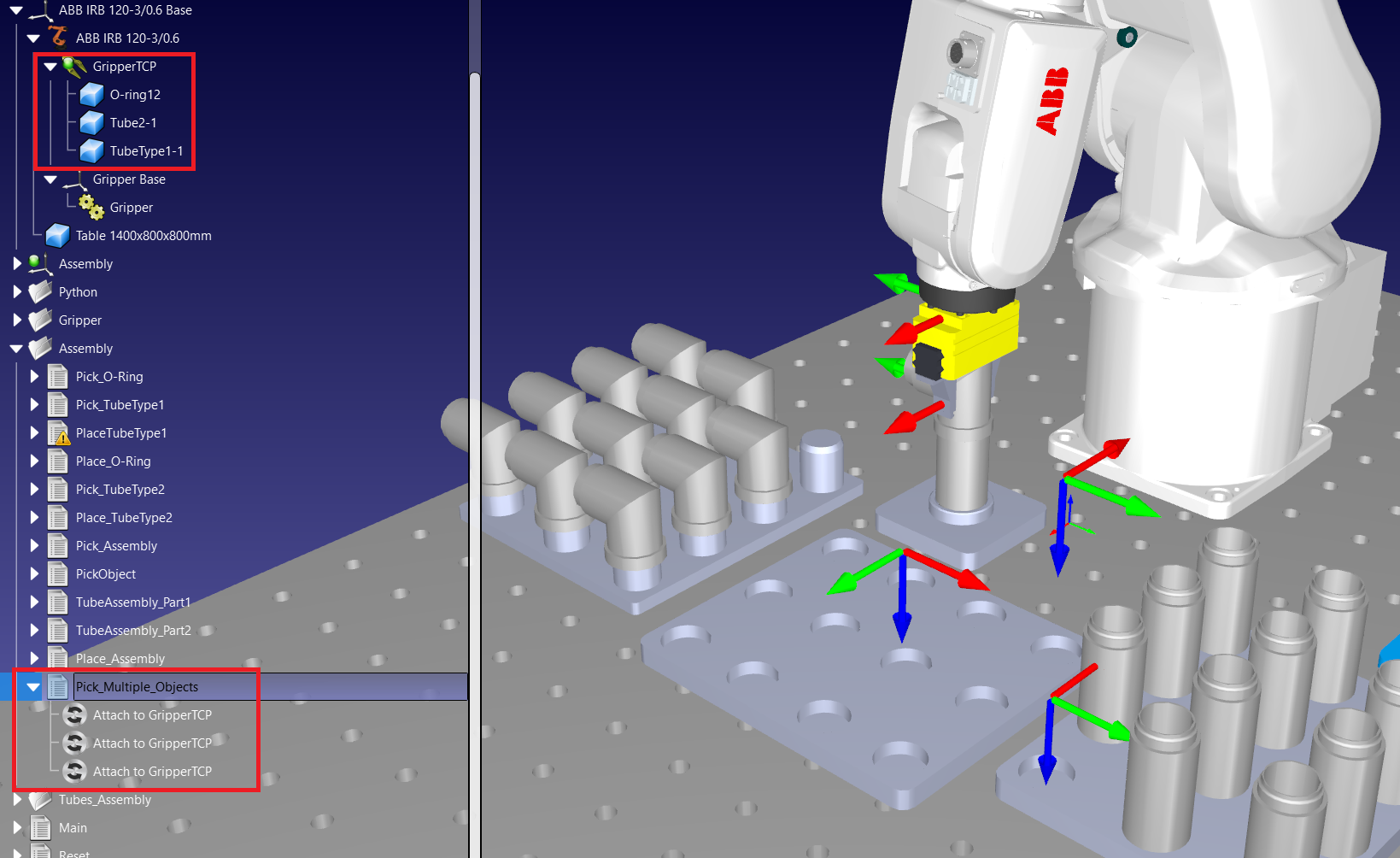
Les applications de prélèvement et de placement peuvent être utilisées pour automatiser une opération d'assemblage. En utilisant plusieurs fois l'événement "attacher un objet", vous pouvez prélever plusieurs objets à la fois et créer un prélèvement d'assemblage. Par exemple, si vous avez 3 objets dans l'assemblage, vous pouvez utiliser l'événement 3 fois comme le montre l'image suivante.
Pick and place à l'aide de l'Add-in de palettisation
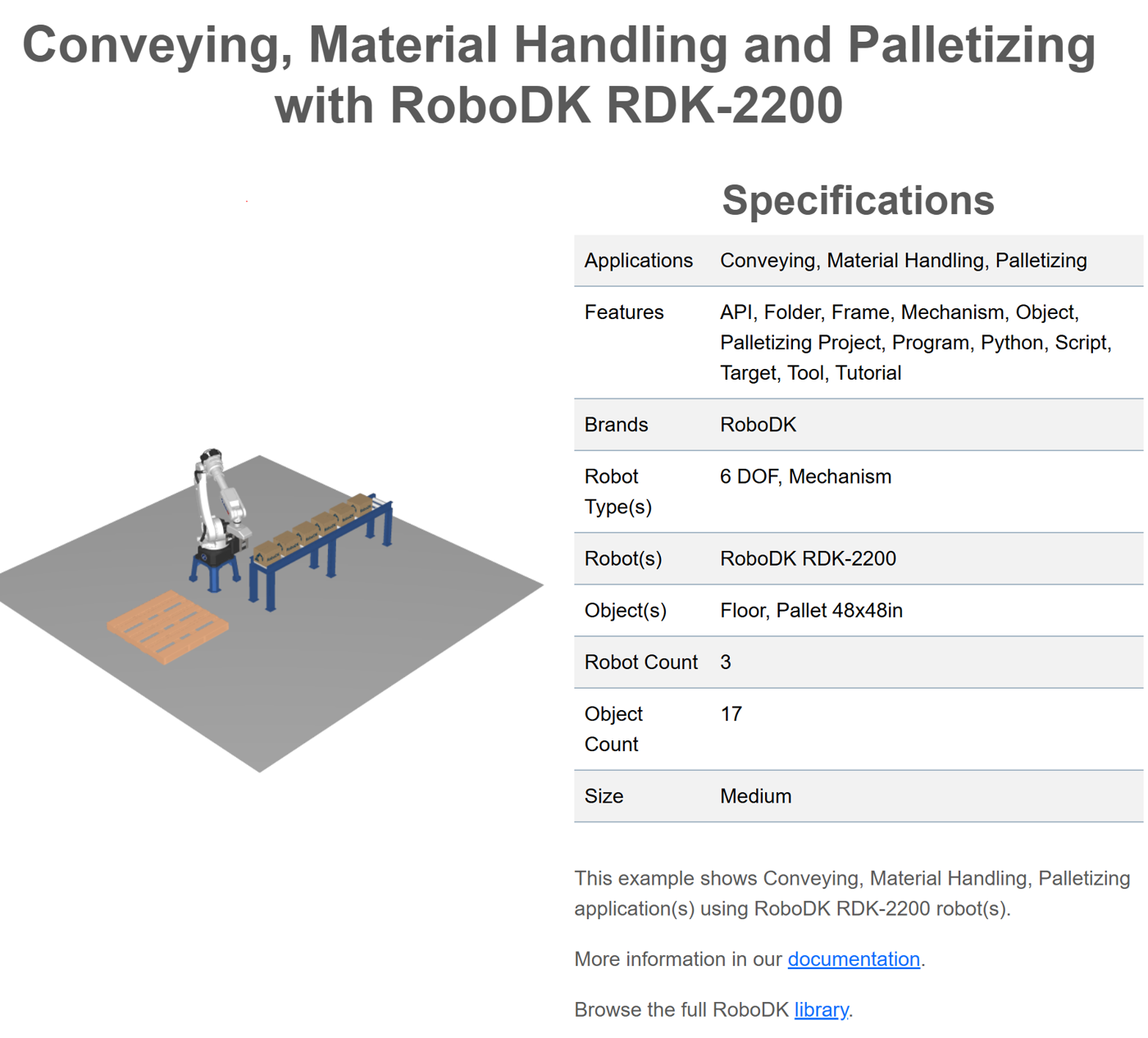
Si vous avez une opération répétitive de prélèvement et de mise en place impliquant un modèle de palettisation, vous pouvez utiliser notre plugin de palettisation pour simplifier la tâche. Il vous suffit d'utiliser le lien suivant et de télécharger notre plugin de palettisation : Palletizing | Add-in Marketplace. Suivez notre documentation sur la palettisation pour plus d'informations sur le plugin de palettisation.
Choisissez et placez en utilisant l'API
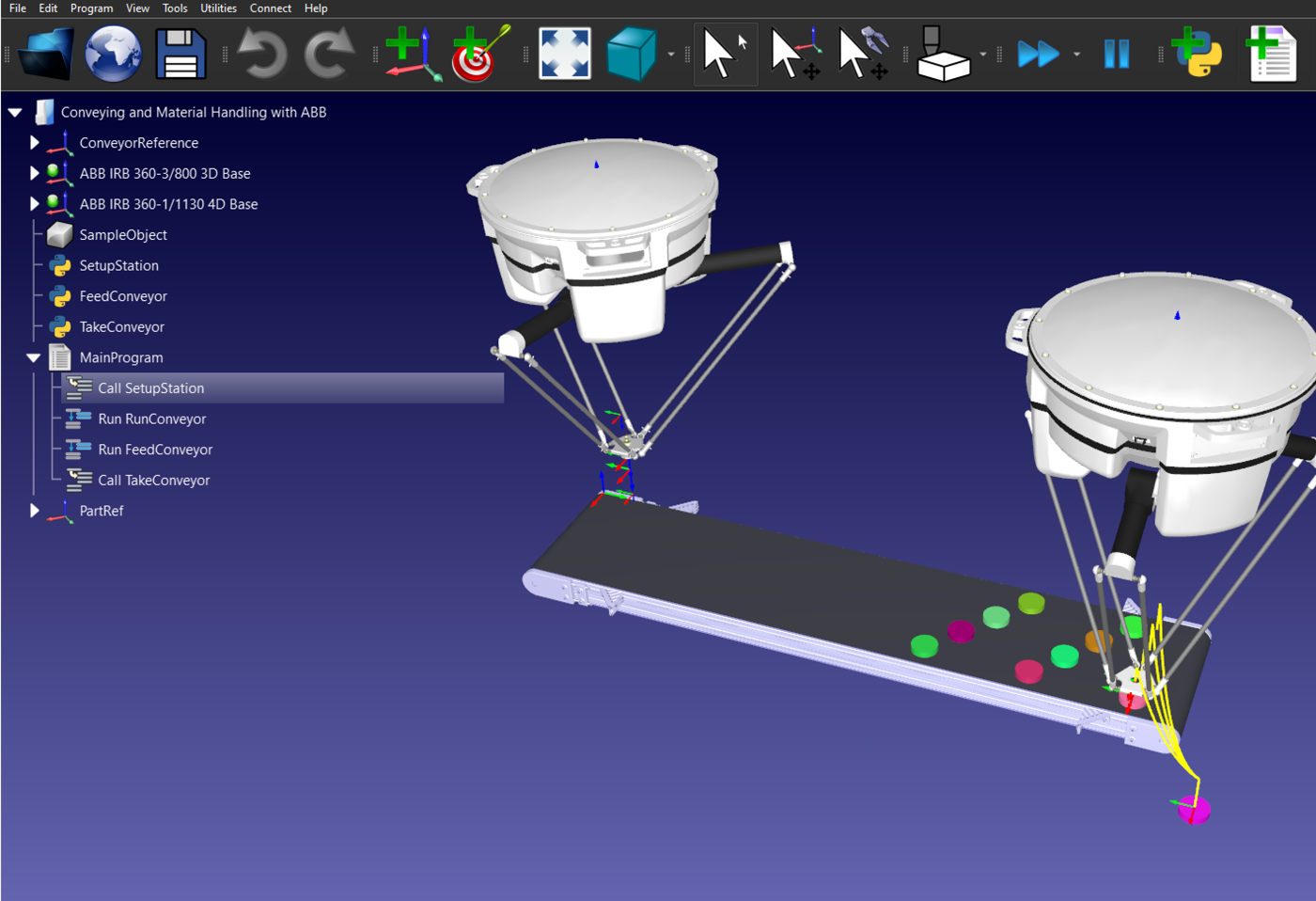
Si vous avez besoin d'opérations de prélèvement et de placement plus avancées, telles que le prélèvement de grands ensembles ou d'objets sur un convoyeur en mouvement, vous pouvez utiliser l'API pour programmer vos applications de prélèvement et de placement.
Cet exemple utilise l'API RoboDK avec Python pour prélever et placer des objets sur un convoyeur en mouvement. Vous pouvez le télécharger depuis notre bibliothèque.
Vous pouvez également jeter un coup d'œil à cette station d'assemblage qui utilise plusieurs pièces pour créer un assemblage final, à l'aide de nombreuses opérations de prélèvement et de placement : Applications mixtes avec Fanuc M-10iD/12.