Créez des cibles pour Pick and Place
Suivez les étapes suivantes pour créer une cible de base dans RoboDK pour une application de prélèvement et de mise en place.
7.Ajoutez des cibles de prélèvement et de placement :
a.Déplacez le robot jusqu'à la position de prélèvement souhaitée.
b.Sélectionnez Programme → Apprentissage de la cible pour enregistrer la position.
c.Répétez l'opération pour les positions Pick, Retract Pick, Place et Retract Place.
8.Organisez les objectifs :
a.Renommez les cibles pour plus de clarté (par exemple, Approach_Pick, Pick, Place). Appuyez sur la touche F2 pour renommer les cibles.
b.N'oubliez pas de créer les cibles sous les systèmes de coordonnées appropriés dans l'arbre des stations.
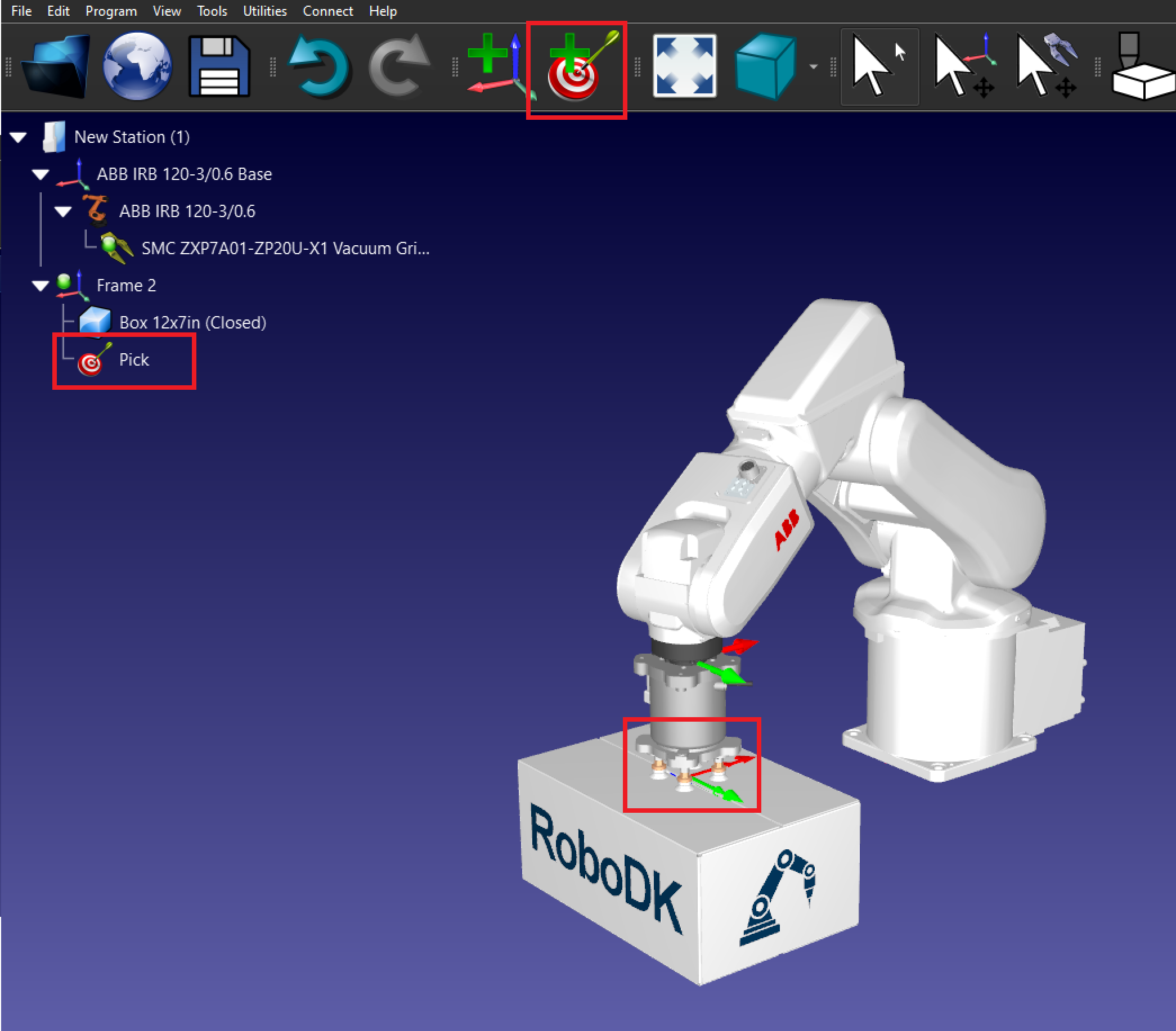
9.Créez la position Pick : Placez le robot au-dessus de la boîte et créez une cible appelée Pick.
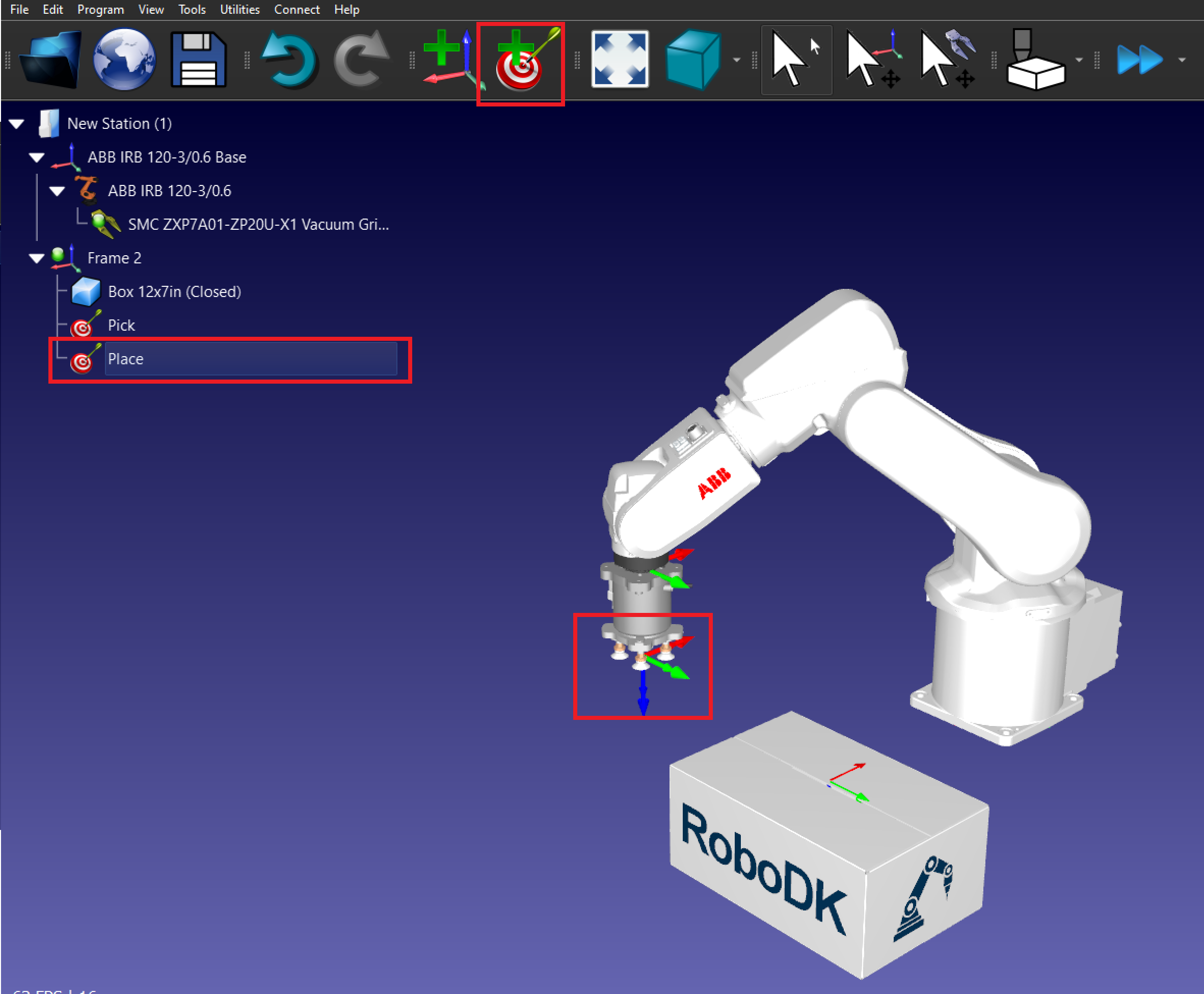
10.Créez la position Place : Déplacez le robot à l'endroit où vous souhaitez placer la boîte et créez une position appelée Place.
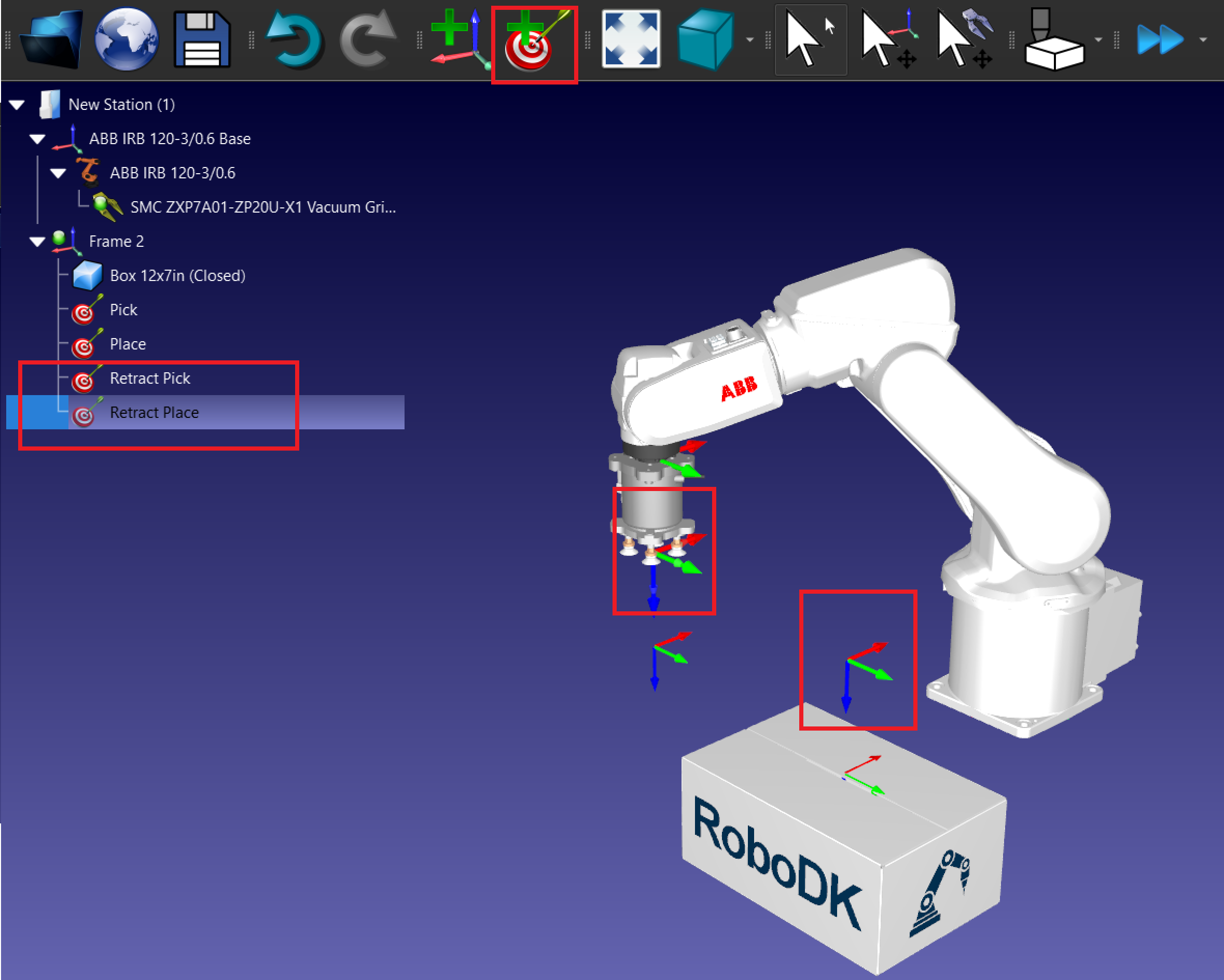
11.Créez les cibles de rétractation :
a.Déplacez le robot vers la cible Pick et vers le haut sur l'axe Z.
b.Créez une nouvelle cible appelée Pick Retract.
c.Répétez l'opération avec la cible Place.