Créez un programme de prélèvement et de placement
Suivez ces étapes pour créer un programme de prise et de dépose de base dans RoboDK avec un bras robotisé à 6 axes utilisant une pince à vide pour déplacer une boîte.
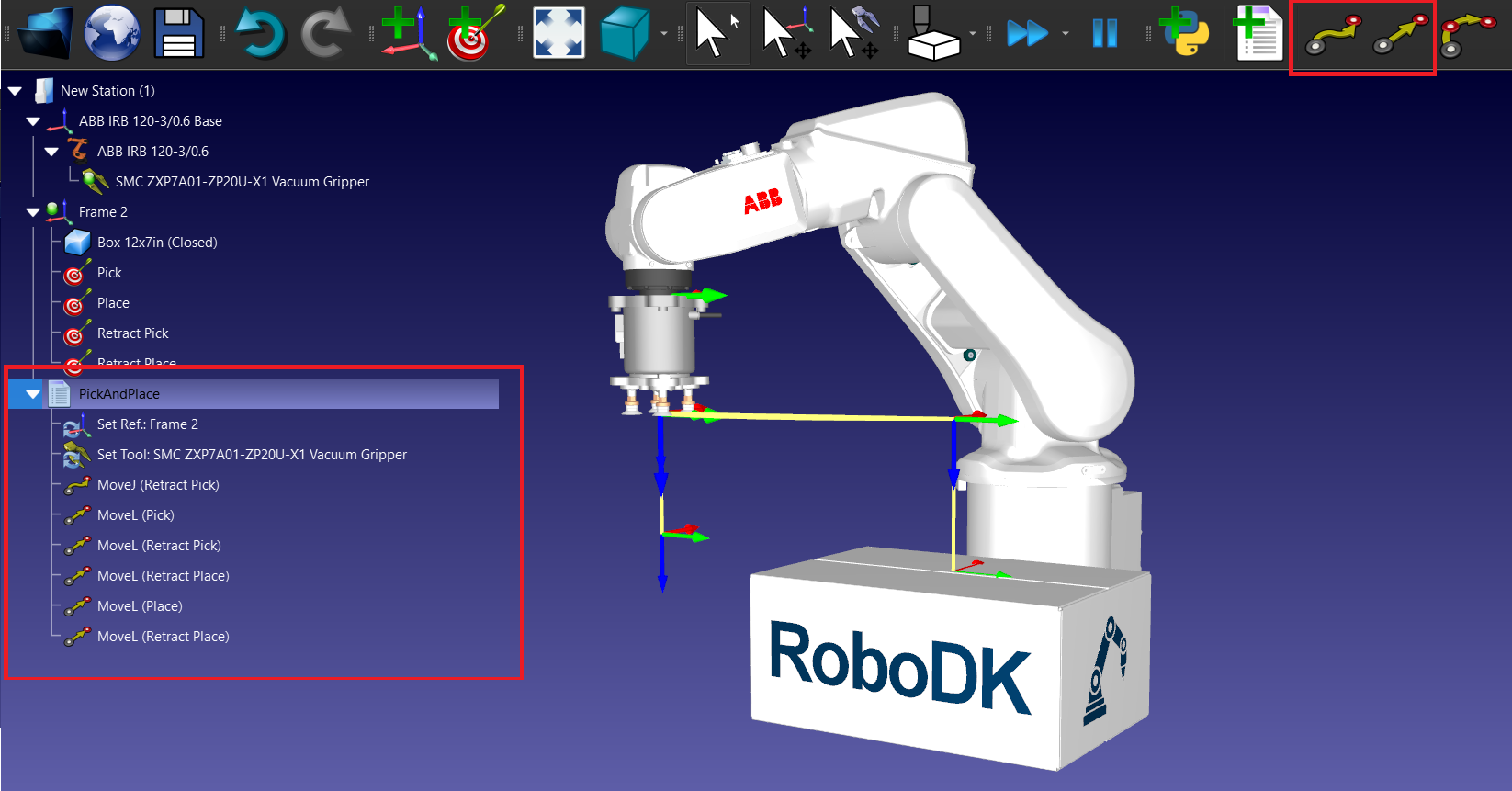
1.Programmez l'opération de prélèvement et de dépose :
a.Créez un nouveau programme : Allez dans Programme → Add-in et nommez-le PickAndPlace.
b.Ajoutez des instructions de mouvement :
i.Ajoutez des instructions MoveJ ou MoveL pour chaque cible.
ii.Déplacez d'abord le robot vers la cible de rétraction, puis créez un MoveL vers la cible Pick et revenez à la cible de rétraction.
iii.Répétez l'opération avec la cible Place.
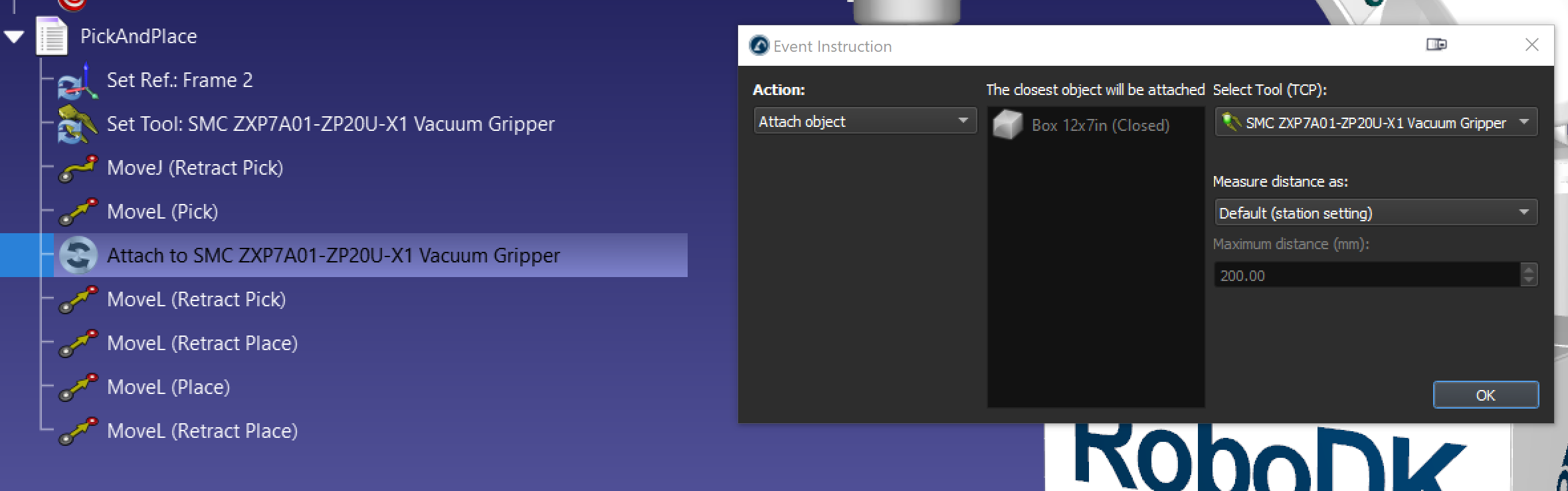
2.L'événement Add-in permet de prélever et de placer l'objet.
a.Pour ajouter un événement, allez dans Programme → Instruction d'événement de simulation.
b.Ajoutez un événement avec l'action Attach object pour prélever la boîte après le MoveL (Pick).
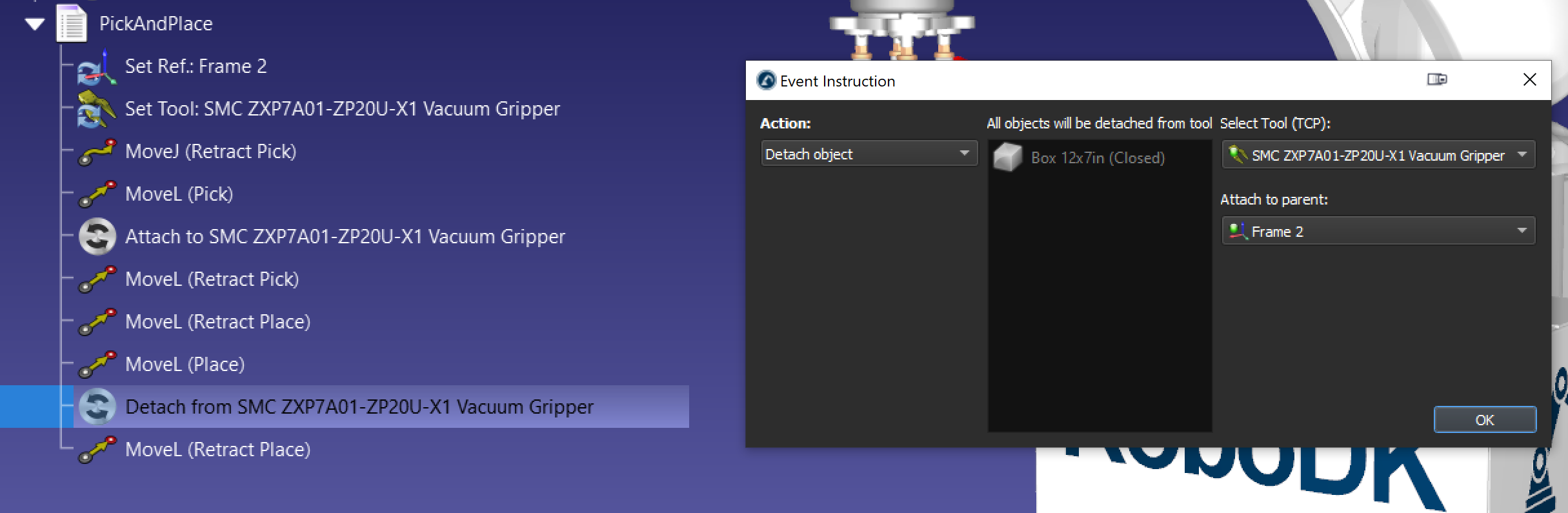
c.Ajoutez un événement avec l'action Détacher l'objet, placez la boîte après le MoveL (Place). L'option Attacher au parent permet d'attacher l'objet à un nouvel objet une fois qu'il est détaché de la pince.
d.Il est conseillé de créer un programme séparé avec une action d'événement Définir la position de l'objet pour réinitialiser la boîte à sa position d'origine si nécessaire.
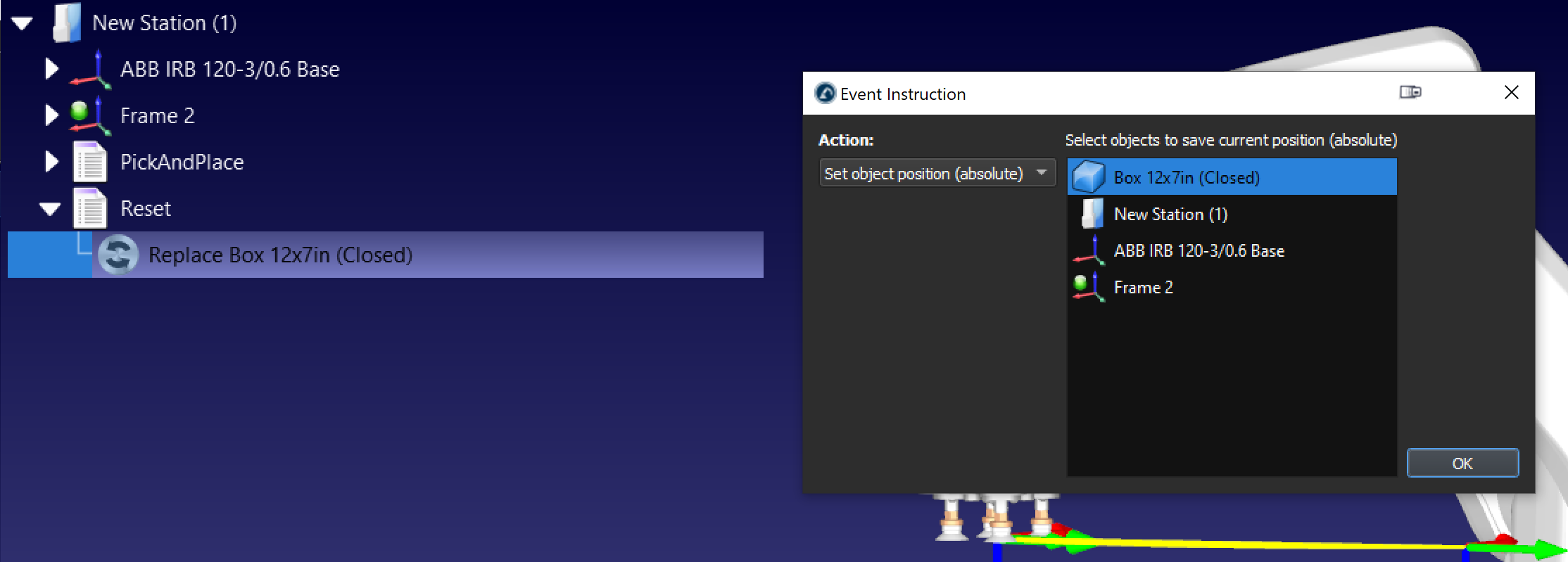
En suivant ces étapes, vous pouvez créer avec succès une station pick-and-place de base dans RoboDK.