Créez un nouveau projet RoboDK
Ces étapes vous montreront comment créer un nouveau projet (également connu sous le nom de station) dans RoboDK pour une application de prélèvement et de mise en place.
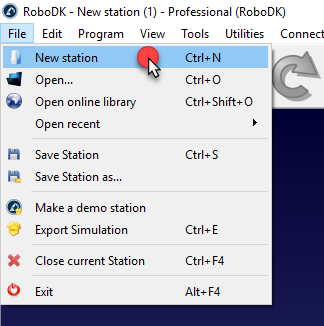
1.Ouvrez RoboDK : Lancez l'application RoboDK sur votre ordinateur.
2.Créez une nouvelle station : Sélectionnez File-New Station (Fichier-Nouvelle station) dans le menu principal de RoboDK - Une nouvelle station vide sera créée en tant qu'espace de travail.
3.Add-in d'un robot de la bibliothèque
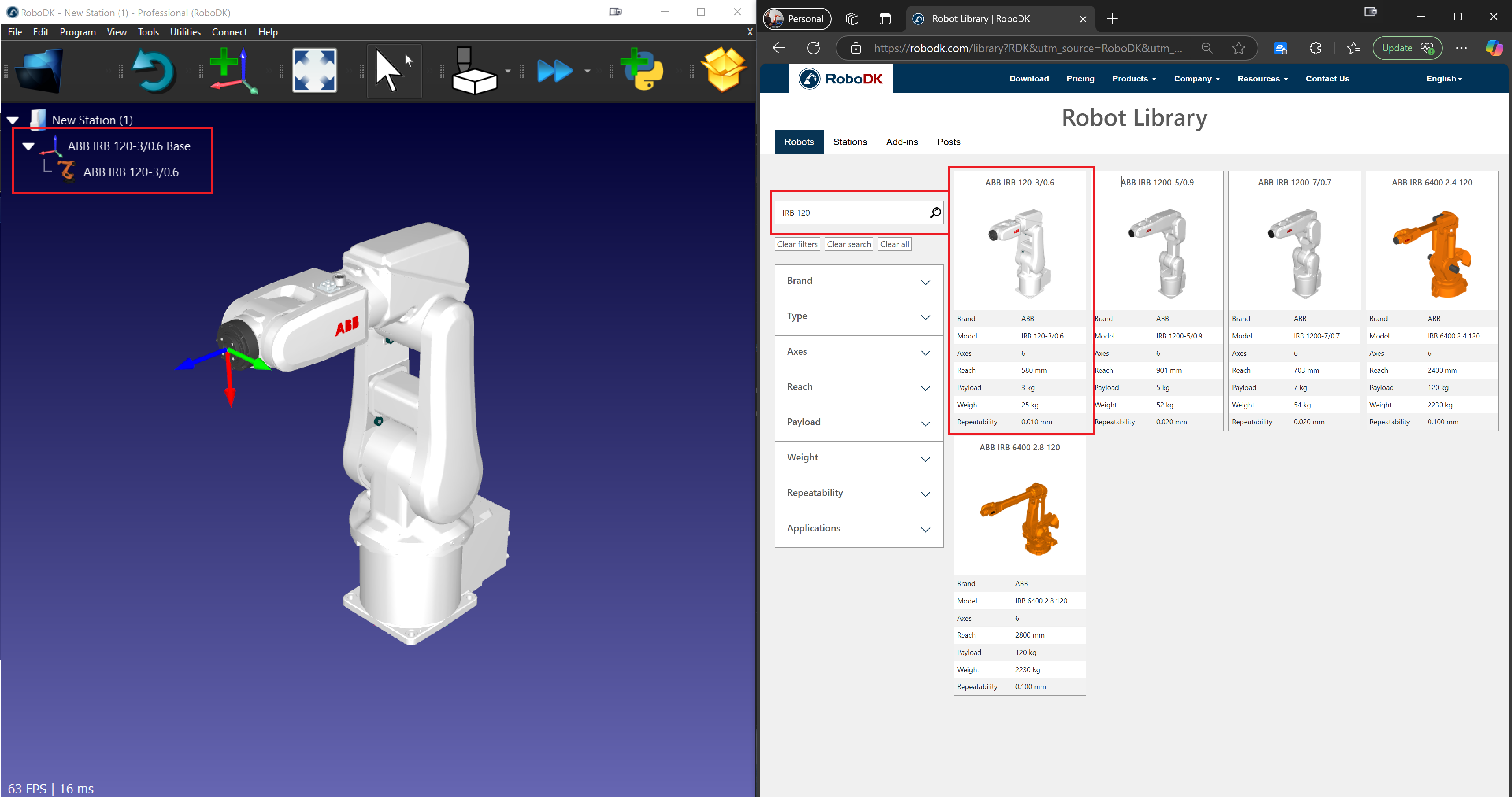
a.Ouvrez la bibliothèque de robots en ligne pour télécharger un robot
i.Dans le menu principal, sélectionnez Fichier → Ouvrir la bibliothèque en ligne.
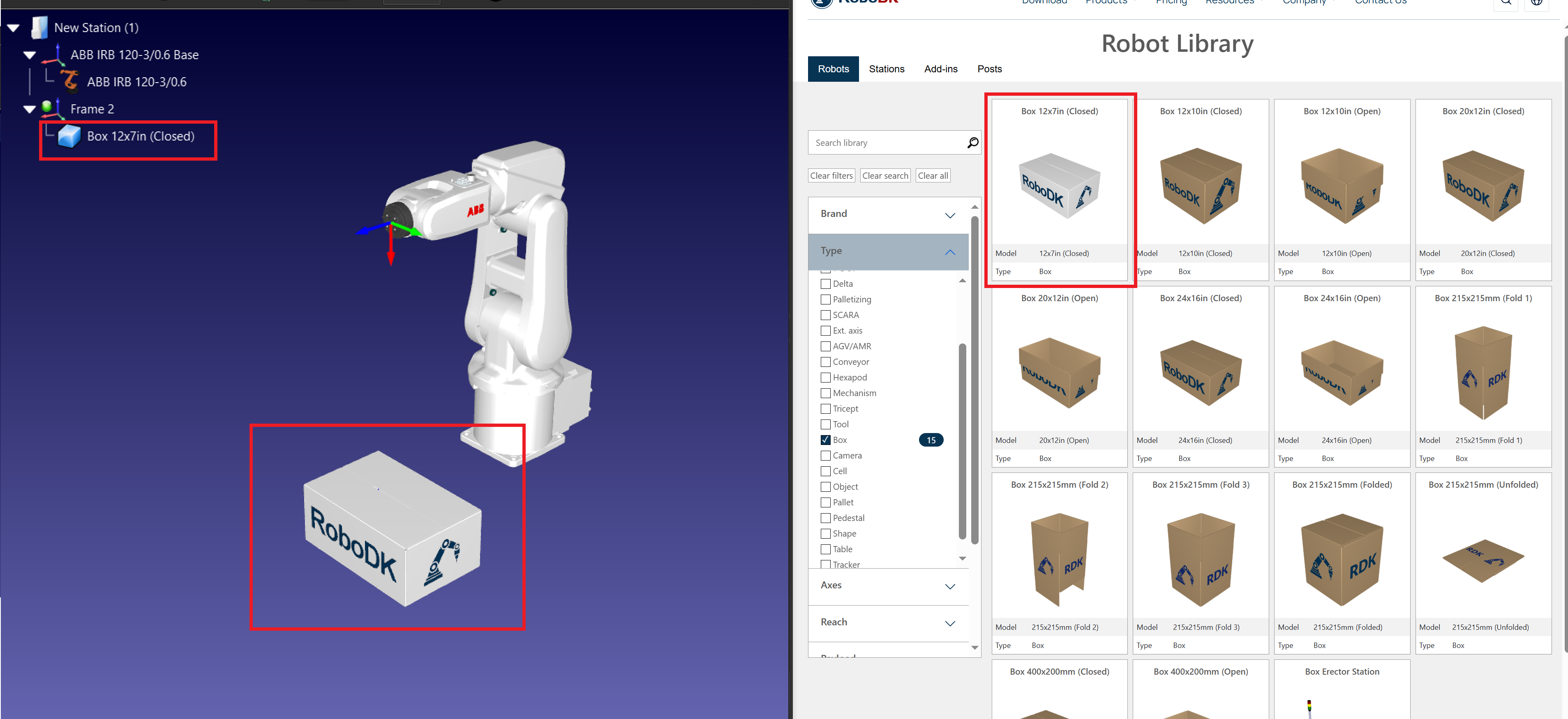
ii.La fenêtre de la bibliothèque RoboDK s'ouvre, affichant une variété de robots industriels.
b.Sélectionnez et importez un robot :
i.Utilisez la barre de recherche pour trouver un robot adapté aux tâches de prise et de dépose (par exemple, UR10, ABB IRB 120, Fanuc LR Mate).
ii.Cliquez sur le robot souhaité et sélectionnez Télécharger.
c.Positionnez le robot dans la station :
i.Le robot apparaît automatiquement dans la station.
ii.Utilisez l'outil de déplacement pour ajuster son emplacement si nécessaire.
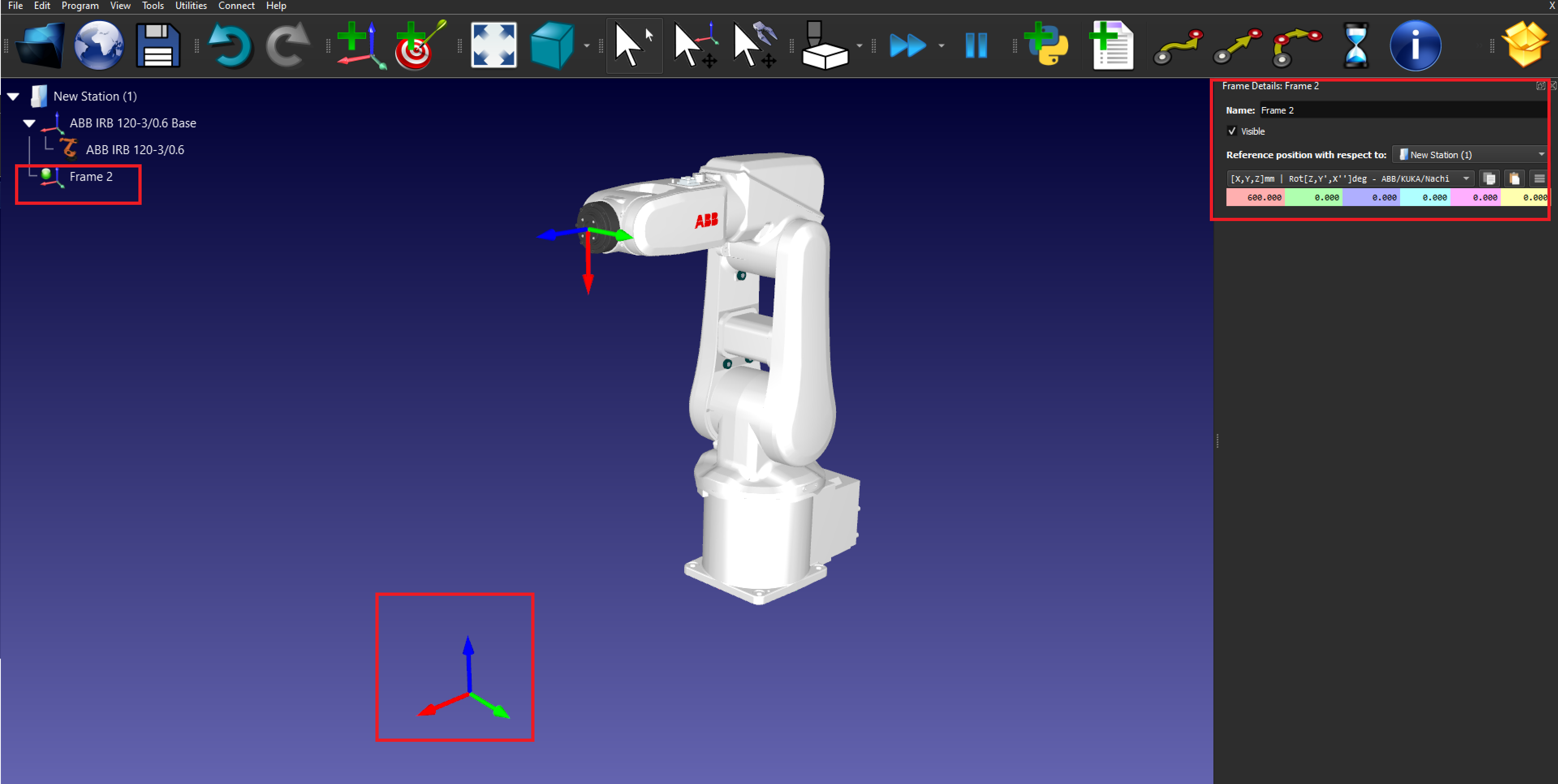
4.Ajouter un système de coordonnées
a.Créez un système de coordonnées :
i.Allez dans Programme → Add-in Reference Frame (Ajouter un système de coordonnées).
ii.Un nouveau système de coordonnées apparaît dans l'arborescence de la station et dans la vue 3D.
b.Positionnez le système de coordonnées :
i.Double-cliquez sur le système de coordonnées pour saisir les coordonnées (X, Y, Z) et les valeurs de rotation.
ii.Cliquez sur OK pour enregistrer la position.
5.Importer des objets 3D
a.Charger les modèles d'objets :
iii.Dans le menu principal, sélectionnez Fichier → Ouvrir.
iv.Parcourez et sélectionnez les modèles 3D des objets à prélever et à placer (par exemple, fichiers STEP, IGES).
b.Positionnez les objets :
v.Utilisez l'outil de déplacement pour ajuster l'emplacement de l'objet dans le système de coordonnées.
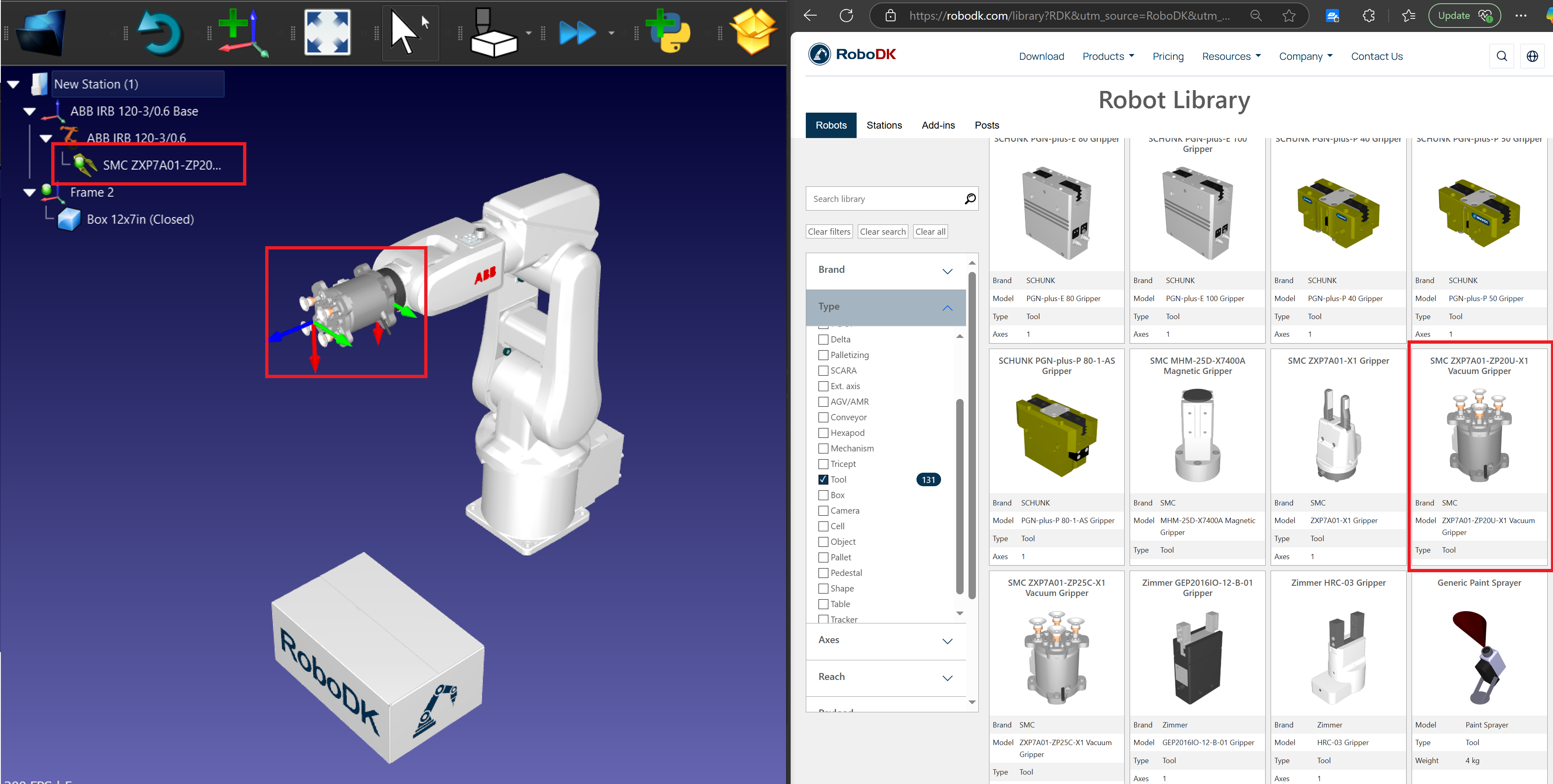
6.Add-in un outil (Gripper)
a.Sélectionnez une pince :
i.Dans le menu principal, allez dans Utilitaires → Ajouter un outil (CDO).
ii.Choisissez une pince dans la bibliothèque de robots ou importez un fichier de pince personnalisé.
b.Fixez l'outil au robot :
i.Cliquez avec le bouton droit de la souris sur la pince dans l'arborescence de la station et sélectionnez Attach to Robot (Attacher au robot).
ii.Choisissez la bride de robot appropriée.
c.Définissez le CDO (point central de l'outil) : Double-cliquez sur l'outil et entrez les coordonnées du CDO par rapport à la bride du robot.